
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Идентификация объекта управленияСодержание книги Поиск на нашем сайте
Задание Переходная функция объекта управления Таблица 1
Аннотация В данной курсовой работе объектом исследования является стационарный инерционный объект с запаздыванием, представленный переходной функцией, а также системой управления. Методами исследования являются элементы ТАУ математического и имитационного моделирования. С помощью методов аппроксимации и идентификации были получены модели объектов в виде передаточных функций. В ходе исследования была установлена модель, которая наиболее точно описывает заданный объект. В работе произведены расчеты параметров настройки ПИ-регуляторов в среде Mathcad двумя методами: Циглера-Никольса и инженерным. Для определения метода, при котором найдены наилучшие настройки регулятора, проведено моделирование при помощи пакета Simulink программы Matlab. По результатам моделирования, был сделан выбор о том, что с настройками регулятора, которые были рассчитаны по методу Циглера-Никольса, система управления наилучшим образом удовлетворяет заданному критерию качества. Затем мы синтезируем систему управления многомерным объектом трех видов: комбинированную, каскадную и автономную. Знание таких систем так же является необходимым при проектировании систем автоматического управления. В работе использованы системы компьютерной математики Matchad 15 M030 и MATLAB R2014b. Перечень ключевых слов: объект управления, регулятор, закон регулирования, параметры настройки, система автоматического управления. Объём работы -42 страницы. Количество таблиц-6 Количество иллюстрация-40 Количество использованных источников-6
Содержание Введение. 6 1. Идентификация объекта управления. 7 1.1. Применение инструментария Identification Toolbox. 7 1.2. Аппроксимация в среде пакета Matlab c использованием инструментария Curve Fitting Toolbox. 11 1.3 Графо-аналитический метод. 14 1.3 Анализ дисперсии. 15 1.4 Выбор адекватной модели объекта. 16 2. Выбор закона регулирования. 17 3. Синтез САУ одномерным объектом. 18 3.1. Метод Циглера-Никольса. 18 3.2. Расчёта параметров настройки ПИ-регулятора инженерными методами 23 3.3. Анализ системы управления. 27 4. Синтез САУ многомерным объектом управления. 30 4.1. Синтез системы несвязанного управления. 30 4.2. Комбинированная система управления. 34 4.3 Каскадная система управления. 37 Заключение: 41 Список использованной литературы.. 42
Введение Исходными данным курсовой работы является переходная функция ОУ по одному из динамических каналов. Работа является учебной, навыки, полученные в ходе исследования, могут быть использованы для выполнения курсовой работы по моделированию систем управления и выпускной квалификационной работы. Необходимо произвести параметрическую идентификацию объекта, заданного переходной функцией, методами аппроксимации и идентификации. Исходя из полученных данных, мы проводим проверку адекватности модели и устанавливаем, какая из моделей наиболее точно описывает заданный объект. После выбора модели производим расчет параметров настройки ПИ-регулятора методами Циглера-Никольса и инженерным. В качестве критерия качества служат настройки параметров регулятора. Также в данной работе мы синтезируем систему управления многомерным объектом трех типов: комбинированную, каскадную и автономную. Рассчитываем параметры настройки регуляторов, компенсаторов, исследуем отклик системы по различным каналам на типовые воздействия. Целью курсовой работы является теоретическое изучение основных понятий, методов расчетов САУ, а также закрепленные излученного материала на практике проведением расчетов. Задание. Переходная функция объекта управления:
Идентификация объекта управления Графо-аналитический метод. Применим графический способ определения параметров передаточной функции. Общий вид передаточной функции известен: Для этой передаточной функции известен общий вид переходной функции: Найдем производную данного выражения: Найдем первый предел полученного выражения: Исходя из геометрического смысла первой производной: Для применения графического метода на графике переходной функции сделаем дополнительные построения:
Рис. 10. График переходной функции Из графика следует:
В параметрическом виде передаточная функция запишется
Сведем полученные в результате идентификации данные в таблицу: Таблица 4.Результаты идентификации
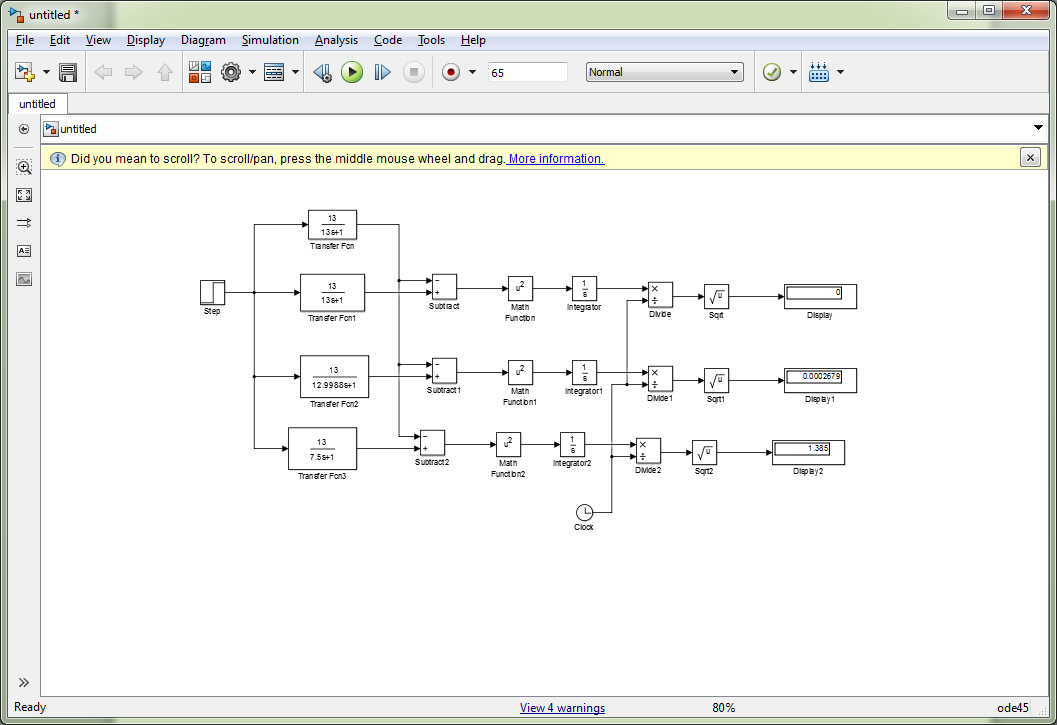
Анализ дисперсии Проведем сравнение полученных результатов с исходными данными. Критерием сравнения считаем среднее квадратическое отклонение (СКО). Для того чтобы получить СКО, необходимо получить значение диссперсий для отклонения оценок передаточной функции от исходных данных. Дисперсия в непрерывном варианте расчитывается по формуле: Формула верна для стационарных, эргодических, центрированных случайных процесов. СКО расчитывается по формуле Для расчета СКО построим S-модель.
Рис. 11. S-модель вычисления средних квадратических отклонений. Выбор закона регулирования Суть вопроса сводится к выбору управления, при котором выходное значение объекта управления совпадало бы с задающим значением или их разница лежала бы в допустимых пределах при изменении внешнего возмущенного воздействия. Для определения закона регулирования вычисляют величину
Подставим в формулу коэффициенты из таблицы №1.Получим:
Т.к. полученное значение находится в промежутке, выбираем ПИ-закон регулирования.
Метод Циглера-Никольса Данный метод основан на критерии Найквист. Суть Критерия заключается в следующем: замкнутая система автоматического регулирования будет устойчива, если устойчива соответствующая ей разомкнутая система и годограф ее АФЧХ не охватывает точку с координатами (-1,0j). Критерий выполняется, если разомкнутая система находится на границе устойчивости при малой степени астатизма.
Суть метода заключается в том, что рассчитывается пропорциональный регулятор, который выводит систему на границу устойчивости. Уравнение для амплитуды и фазы нашего объекта:
Так как нам необходимо перейти на главную ветвь арктангенса изменим уравнение для фазы:
Далее постоим график зависимости фазы от частоты в границах [0;-π] по оси φ и [0;ω] по оси ω.
Рис.12. Графическое определение критической частоты. Далее делаем уточнение корня с помощью функции root:
Находим критический коэффициент передачи:
Переходим на эмпирический части метода, а именно к нахождению коэффициента передачи, времени изодрома и интегральной составляющей регулятора по следующим формулам:
Надо так же заметить, что метод применим лишь для объекта в совокупности по числителю и знаменателю передаточной функции третьего и более высокого порядков. В противном случае объект должен обладать запаздыванием. Исследуем реакцию системы на типовые сигналы по каналам управления и возмущения. 1) Переходная функция по каналу управления.
Рис.13.Замкнутая система управления со ступенчатым воздействие по каналу управления. где: PID Controller: P= 0,132 I= 7.1*10^-3; Transport Delay: Time Delay =6,5; Step: Final Value = 1, Step Time = 0, Initial Value = 0, Sample Time = 0.
Рис.14.Реакция системы по каналу управления на ступенчатое воздействие. 2) Переходная функция по каналу возмущения.
Рис.15.Замкнутая система управления со ступенчатым воздействием по каналу возмущения. где: PID Controller: P= 0,132 I= 7.1*10^-3; Transport Delay: Time Delay =6,5; Step: Final Value = 1, Step Time = 0, Initial Value = 0, Sample Time = 0.
Рис.16.Реакция системы по каналу возмущения на ступенчатое воздействие. 3) Импульсная функция по каналу управления.
где: PID Controller: P= 0,132 I= 7.1*10^-3; Transport Delay: Time Delay =6,5; Step: Final Value = 1, Step Time = 0, Initial Value = 0, Sample Time = 0. Pulse Generator: Amplitude:1;Period:1000;Pulse Width(% of period):0.0001
Рис.17.Реакция системы по каналу управления на импульсное воздействие 4) Импульсная функция по каналу возмущения.
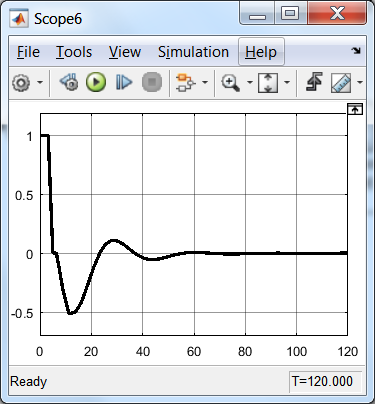
Рис.18.Замкнутая система управления с импульсным воздействием по каналу возмущения. где: PID Controller: P= 0,132 I= 7.1*10^-3; Transport Delay: Time Delay =6,5; Pulse Generator: Amplitude:1;Period:1000;Pulse Width(% of period):0.5.
Рис.19.Реакция системы по каналу возмущения на импульсное воздействие. Анализ системы управления Основным критерием качества регулирования является настройки параметров регулятора переходного процессе, при воздействии двух типовых воздействий: импульса и единичной ступеньки.
Метод Циглера-Никольса: Находим амплитуды А1 и А3 для каждого из графиков и вычисляем степени затухания для каждой пары амплитуд:
A1 – амплитуда первого колебания. А3 – амплитуда третьего колебания. Находим амплитуды А1 и А3 для каждого из графиков.
Считаем среднее отклонение от заданной величины параметры настройки регулятора и сравниваем ее с эмпирическим значением. 𝜓=0,85
Расчёта параметров настройки ПИ-регулятора инженерными методами:
Считаем среднее отклонение от заданной величины параметры настройки регулятора и сравниваем ее с эмпирическим значением. 𝜓=0,85
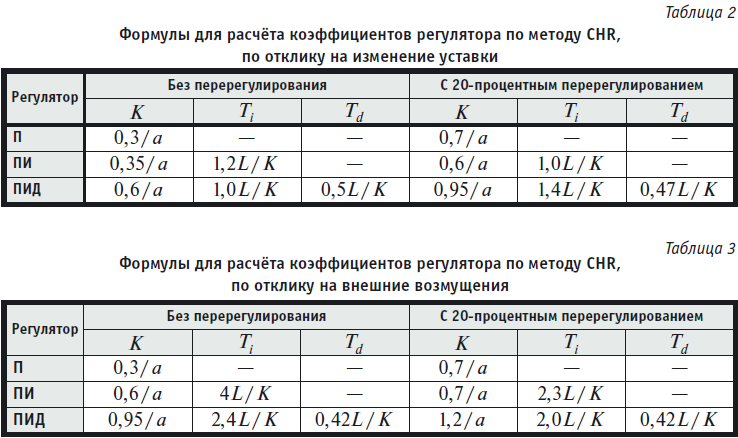
Формулы для расчёта ПИ-регулятора по методу CHR: Таблица 5
Таблица 6
Вывод: Были рассчитаны параметры регулятора методом Циглера-Никольса Из полученных данных делаем вывод, что метод Циглера-Никольса предпочтительнее для нашего объекта.
Заключение: В первом разделе курсовой работы были рассмотрены методы идентификации и аппроксимации. Произведено сравнение результатов, полученных по данным методам. Критерием сравнения было среднеквадратичное отклонение (СКО). И было установлено, что наименьшее отклонение, а следовательно наибольшее приближение получилось у функции, рассчитанной аппроксимацией. В дальнейших расчетах использовались данные этого метода. Исходя из данных расчета, был выбран закон регулирования (ПИ-закон регулирования). Рассчитали параметры настройки регулятора двумя методами: инженерным методам и Циглера-Никольса. Провели расчёты степеней затухания переходных процессов. После расчёта средних значений степеней затухания можно сделать вывод о том, что параметры регулятора, рассчитанные по методу Циглера-Никольса, лучше подходят нашему объекту. Завершением курсовой работы было проведение синтеза систем управления многомерным объектом. Мы рассмотрели три системы: систему несвязанного управления, комбинированную систему и каскадную систему управления. Для этих систем были рассчитаны компенсаторы возмущений и ПИ-регуляторы. Для расчета параметров ПИ-регуляторов был применен метод стандартных биномиальных форм Ньютона. Получены реакции систем на типовые входные воздействия. В среднем полученное время регулирования не превышает заданное.
Список использованной литературы 1.Теория автоматического управления. Часть1. Линейные системы автоматического управления: учеб.пособие/ Иван. гос. хим.-технол. академ.; А.А. Головушкин, Б.А. Головушкин. Иваново, 1993.-80 с. 2.Теория автоматического управления. Часть 2. Специальные системы автоматического управления: учеб.пособие/ Иван. гос. хим.-технол. академ.; А.А. Головушкин, А.Н. Лабутин, Б.А. Головушкин. Иваново, 1995.-88 с. 3.Ротач В.Я. Теория автоматического управления [Электронный ресурс]/В.Я.Ротач-Режим доступа http:/www.booksgid.com. 4. Кирьянов Д.В. Mathcad 13. СПб.: БХВ,- Петербург 2006 г. 5. А.Данилов. Компьютерный практикум по курсу "Теория управления". Simulink-моделирование в среде Matlab. МГУИЭ. 2002. 6. Дьяконов В. П. MATLAB. Полный самоучитель. – М.: ДМК Пресс, 2012. – 768 с.: ил.
Задание Переходная функция объекта управления Таблица 1
Аннотация В данной курсовой работе объектом исследования является стационарный инерционный объект с запаздыванием, представленный переходной функцией, а также системой управления. Методами исследования являются элементы ТАУ математического и имитационного моделирования. С помощью методов аппроксимации и идентификации были получены модели объектов в виде передаточных функций. В ходе исследования была установлена модель, которая наиболее точно описывает заданный объект. В работе произведены расчеты параметров настройки ПИ-регуляторов в среде Mathcad двумя методами: Циглера-Никольса и инженерным. Для определения метода, при котором найдены наилучшие настройки регулятора, проведено моделирование при помощи пакета Simulink программы Matlab. По результатам моделирования, был сделан выбор о том, что с настройками регулятора, которые были рассчитаны по методу Циглера-Никольса, система управления наилучшим образом удовлетворяет заданному критерию качества. Затем мы синтезируем систему управления многомерным объектом трех видов: комбинированную, каскадную и автономную. Знание таких систем так же является необходимым при проектировании систем автоматического управления. В работе использованы системы компьютерной математики Matchad 15 M030 и MATLAB R2014b. Перечень ключевых слов: объект управления, регулятор, закон регулирования, параметры настройки, система автоматического управления. Объём работы -42 страницы. Количество таблиц-6 Количество иллюстрация-40 Количество использованных источников-6
Содержание Введение. 6 1. Идентификация объекта управления. 7 1.1. Применение инструментария Identification Toolbox. 7 1.2. Аппроксимация в среде пакета Matlab c использованием инструментария Curve Fitting Toolbox. 11 1.3 Графо-аналитический метод. 14 1.3 Анализ дисперсии. 15 1.4 Выбор адекватной модели объекта. 16 2. Выбор закона регулирования. 17 3. Синтез САУ одномерным объектом. 18 3.1. Метод Циглера-Никольса. 18 3.2. Расчёта параметров настройки ПИ-регулятора инженерными методами 23 3.3. Анализ системы управления. 27 4. Синтез САУ многомерным объектом управления. 30 4.1. Синтез системы несвязанного управления. 30 4.2. Комбинированная система управления. 34 4.3 Каскадная система управления. 37 Заключение: 41 Список использованной литературы.. 42
Введение Исходными данным курсовой работы является переходная функция ОУ по одному из динамических каналов. Работа является учебной, навыки, полученные в ходе исследования, могут быть использованы для выполнения курсовой работы по моделированию систем управления и выпускной квалификационной работы. Необходимо произвести параметрическую идентификацию объекта, заданного переходной функцией, методами аппроксимации и идентификации. Исходя из полученных данных, мы проводим проверку адекватности модели и устанавливаем, какая из моделей наиболее точно описывает заданный объект. После выбора модели производим расчет параметров настройки ПИ-регулятора методами Циглера-Никольса и инженерным. В качестве критерия качества служат настройки параметров регулятора. Также в данной работе мы синтезируем систему управления многомерным объектом трех типов: комбинированную, каскадную и автономную. Рассчитываем параметры настройки регуляторов, компенсаторов, исследуем отклик системы по различным каналам на типовые воздействия. Целью курсовой работы является теоретическое изучение основных понятий, методов расчетов САУ, а также закрепленные излученного материала на практике проведением расчетов. Задание. Переходная функция объекта управления:
Идентификация объекта управления
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2021-05-27; просмотров: 264; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.220 (0.008 с.) |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||


 . Время запаздываания было определено ранее. Передаточная функция без запаздывания будет выглядеть:
. Время запаздываания было определено ранее. Передаточная функция без запаздывания будет выглядеть: 
 .
. .
. .
. . Где
. Где  – угол наклона касательной к переходной функции в точке ее начала.
– угол наклона касательной к переходной функции в точке ее начала.





 ; где:
; где:  ;
; 
 . Для дискретного процесса с постоянным тактом дискретности дисперсия будет расчитана по формуле:
. Для дискретного процесса с постоянным тактом дискретности дисперсия будет расчитана по формуле:  .
.
 , где τз=0,5*T=0.5*13=6,5.
, где τз=0,5*T=0.5*13=6,5.
 -реальный закон регулирования.
-реальный закон регулирования. -пропорциональный закон
-пропорциональный закон -ПИ-закон
-ПИ-закон -ПИД-закон
-ПИД-закон -предикторы
-предикторы





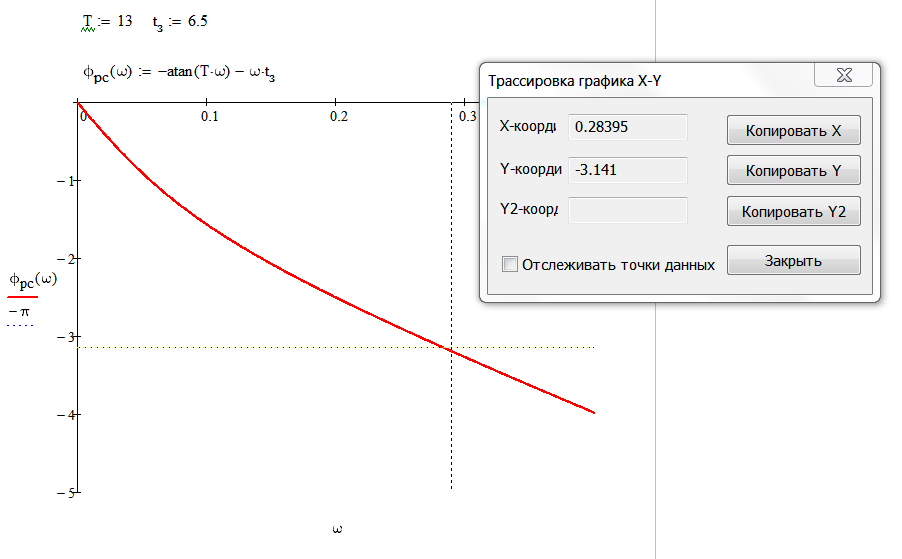
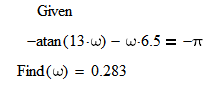
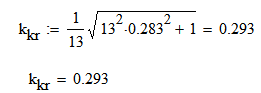
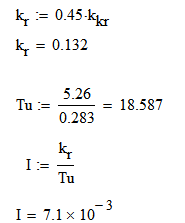
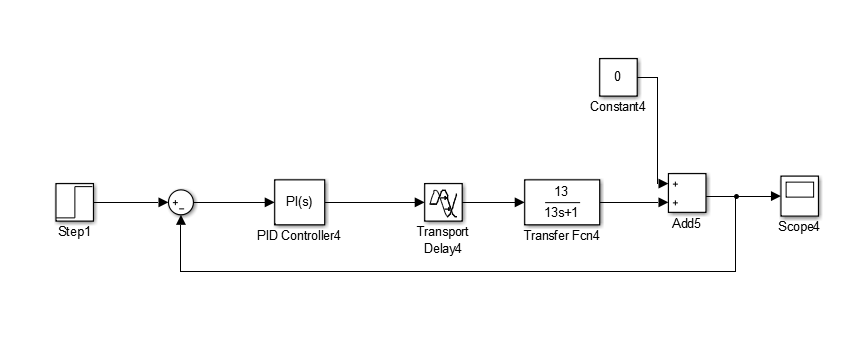
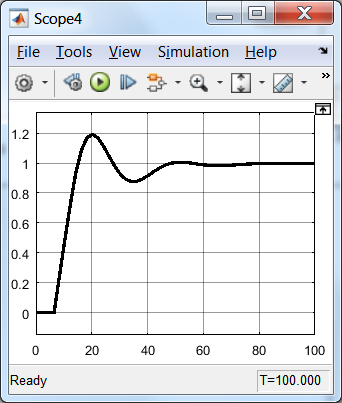

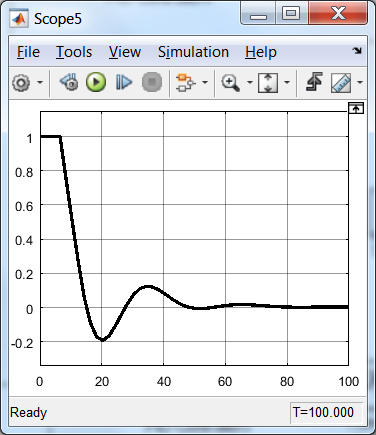
 Рис.16.Замкнутая система управления с импульсным воздействием по каналу управления.
Рис.16.Замкнутая система управления с импульсным воздействием по каналу управления.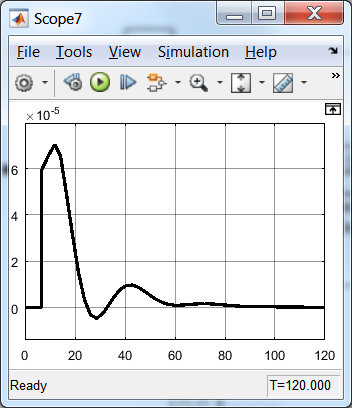


 – степень затухания модели со ступенчатым воздействием по каналу управления.
– степень затухания модели со ступенчатым воздействием по каналу управления. – степень затухания модели со ступенчатым воздействием по каналу возмущения.
– степень затухания модели со ступенчатым воздействием по каналу возмущения. – степень затухания модели с импульсным воздействием по каналу управления.
– степень затухания модели с импульсным воздействием по каналу управления. – степень затухания модели импульсным воздействием по каналу возмущения.
– степень затухания модели импульсным воздействием по каналу возмущения. – среднее значение степеней затухания.
– среднее значение степеней затухания.











 Критерием качества служит параметры настройки регулятора. Соответственно отклонения от заданной величины параметры настройки регулятора 0,85 равно
Критерием качества служит параметры настройки регулятора. Соответственно отклонения от заданной величины параметры настройки регулятора 0,85 равно  . Так же были рассчитаны параметры ПИ-регулятора инженерным методом
. Так же были рассчитаны параметры ПИ-регулятора инженерным методом  ,где параметры настройки регулятора
,где параметры настройки регулятора  .
.


