Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Лекция 10. Сетевые стандарты нижнего уровня
Лекция 10. Сетевые стандарты нижнего уровня Нижний уровень судовых систем управления – это уровень управления оборудованием и процессами. Оборудование: главный двигатель, дизель-генератор, компрессор, сепаратор, котел и т.п. Процессы – регулирование скорости, частоты, напряжения, давления, температуры и т.п. Т.е. с точки зрения системы управления это уровень датчиков, исполнительных устройств и регуляторов. В данном случае пока речь идет о традиционных датчиках и исполнительных устройствах, не интеллектуальных. Эти традиционные датчики и исполнительные устройства подключаются к контроллерам по радиальной схеме, т.е. каждый – по своей паре проводов (или по трем проводам). Обычно этот уровень систем обозначается номером 1. Важное требование к стандартам этого уровня – возможность работы в режиме жесткого реального времени, когда можно заранее просчитать время реакции на любое событие в системе управления, что особенно важно в аварийных ситуациях. Это сразу накладывает ограничения на используемые методы доступа к каналу связи, которые не могут быть случайными (как, например, CSMA/CD), а должны относиться к группе детерминированных методов (например, CSMA/BA или Master-Slave). Кроме того, желательно, чтобы протоколы стандартов нижнего уровня были экономичными, т.е. количество служебной информации было относительно небольшим, т.к. чаще всего в таких сетях передаются довольно короткие сообщения (значения сигналов и команды), а не громоздкие файлы. В приложенной презентации к сетям нижнего уровня относится стандарт CAN (слайды с 6 по 11). На слайде 2 показана таблица уровней системы управления. Мы сейчас говорим про уровень 1, уровень машин. Уровень 0 будем обсуждать позже, это интеллектуальные датчики и исполнительные устройства. На слайде 3 приведена классификация сетевых промышленных сетей по 3 уровням применения. Стандарт CAN, как видим, находится в группе сетей нижнего уровня. На 8 слайде показана топология CAN-сети. Это шина, т.е. магистральная топология. Все устройства на шине имеют равные права, используется принцип производителя-потребителя информации. В каждом цикле сети одно устройство является производителем информации, остальные – потребители, они информацию могут использовать. Информация доступна все потребителям одновременно. Нет арбитра шины, все устройства равноправны.
На слайде 9 показан механизм побитного арбитража шины. Контроллеры имеют выходные драйверы с открытым коллектором и соединяются по схеме «монтажное И». В этом случае нулевой уровень сигнала является доминантным, единичный – рецессивным. Устройства могут одновременно передавать и слушать линию. При возникновении конфликта на линии действует правило побитного арбитража: если все устройства передают логические 1, на шине будет уровень 1, если все устройства передают 0, на шине будет 0. Но на шине будет 0 и в том случае, если хотя бы одно устройство в данном такте передает логический 0. Все устройства, которые в этом такте пытались передать 1, а на шине обнаружили 0, должны отключиться. Поскольку все идентификаторы отличаются друг от друга, через определенное количество тактов на шине останется одно передающее устройство. При известной длительности такта (например, 1 мкс при скорости передачи 1 мб/сек) время арбитража можно точно определить заранее. В стандарте CAN 2.0 А используется 11-битный идентификатор, значит, максимальное время арбитража 11 мкс. Поскольку количество устройств в такой сети всегда заранее известно, время арбитража можно точно рассчитать, что важно для режима жесткого реального времени. Ниже приведена информация из описания стандарта CAN Стандарт CAN Форматы кадров Имеются два формата, которые отличаются по длине поля идентификатора: · Кадры с 11-разрядным идентификатором - называются стандартными кадрами; · Кадры, содержащие 29 разрядные идентификаторы, называются расширенными кадрами. Типы кадров Кадр данных передает данные от передатчика приемнику. Кадр удаленного запроса данных передается узлом, чтобы запросить передачу кадра данных с тем же самым идентификатором. Кадр ошибки передается любым узлом при обнаружении ошибки на шине. Кадр перегрузки используется, чтобы обеспечить дополнительную задержку между предшествующим и последующим кадром данных или кадром удаленного запроса данных. Кадры данных и кадры удаленного запроса данных могут использоваться и в стандартном и в расширенном формате; они отделяются от предшествующих кадров межкадровым пространством.
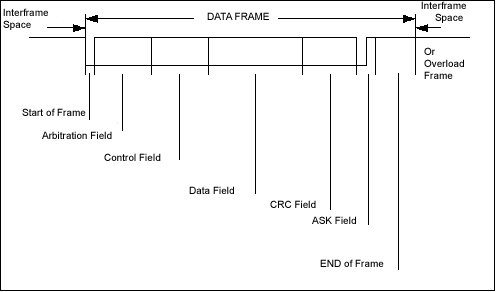
Кадр данных (Data frame) Кадр данных состоит из семи различных полей: Начало кадра» (start of frame), «поле арбитража» (arbitration field), «поле управления» (control field), «поле данных» (data field), «поле CRC» (CRC field), «поле подтверждения» (ACK field), «конец кадра» (end of frame). Поле данных может иметь нулевую длину. Кадр данных представлен на рисунке 1.2.
« Рисунок 1.2 – Кадр данных Идентификатор Идентификатор - стандартный формат Длина идентификатора - 11 бит и соответствует BASE ID в расширенном формате. Эти биты передаются в порядке ID-28 … ID-18. Самый младший бит - ID-18. 7 старших битов (ID-28 - ID-22) не должны быть все единичными битами. Идентификатор - расширенный формат В отличие от стандартного идентификатора, расширенный идентификатор состоит из 29 бит. Его формат содержит две секции: Base ID Base ID состоит из 11 бит. Эта секция передается в порядке от ID-28 до ID-18. Это эквивалентно формату стандартного идентификатора. Base ID определяет базовый приоритет расширенного кадра. Extended ID Extended ID состоит из 18 бит. Эта секция передается в порядке от ID-17 до ID-0. В стандартном кадре идентификатор сопровождается RTR битом. Лекция 10. Сетевые стандарты нижнего уровня Нижний уровень судовых систем управления – это уровень управления оборудованием и процессами. Оборудование: главный двигатель, дизель-генератор, компрессор, сепаратор, котел и т.п. Процессы – регулирование скорости, частоты, напряжения, давления, температуры и т.п. Т.е. с точки зрения системы управления это уровень датчиков, исполнительных устройств и регуляторов. В данном случае пока речь идет о традиционных датчиках и исполнительных устройствах, не интеллектуальных. Эти традиционные датчики и исполнительные устройства подключаются к контроллерам по радиальной схеме, т.е. каждый – по своей паре проводов (или по трем проводам). Обычно этот уровень систем обозначается номером 1. Важное требование к стандартам этого уровня – возможность работы в режиме жесткого реального времени, когда можно заранее просчитать время реакции на любое событие в системе управления, что особенно важно в аварийных ситуациях. Это сразу накладывает ограничения на используемые методы доступа к каналу связи, которые не могут быть случайными (как, например, CSMA/CD), а должны относиться к группе детерминированных методов (например, CSMA/BA или Master-Slave). Кроме того, желательно, чтобы протоколы стандартов нижнего уровня были экономичными, т.е. количество служебной информации было относительно небольшим, т.к. чаще всего в таких сетях передаются довольно короткие сообщения (значения сигналов и команды), а не громоздкие файлы. В приложенной презентации к сетям нижнего уровня относится стандарт CAN (слайды с 6 по 11). На слайде 2 показана таблица уровней системы управления. Мы сейчас говорим про уровень 1, уровень машин. Уровень 0 будем обсуждать позже, это интеллектуальные датчики и исполнительные устройства. На слайде 3 приведена классификация сетевых промышленных сетей по 3 уровням применения. Стандарт CAN, как видим, находится в группе сетей нижнего уровня. На 8 слайде показана топология CAN-сети. Это шина, т.е. магистральная топология. Все устройства на шине имеют равные права, используется принцип производителя-потребителя информации. В каждом цикле сети одно устройство является производителем информации, остальные – потребители, они информацию могут использовать. Информация доступна все потребителям одновременно. Нет арбитра шины, все устройства равноправны.
На слайде 9 показан механизм побитного арбитража шины. Контроллеры имеют выходные драйверы с открытым коллектором и соединяются по схеме «монтажное И». В этом случае нулевой уровень сигнала является доминантным, единичный – рецессивным. Устройства могут одновременно передавать и слушать линию. При возникновении конфликта на линии действует правило побитного арбитража: если все устройства передают логические 1, на шине будет уровень 1, если все устройства передают 0, на шине будет 0. Но на шине будет 0 и в том случае, если хотя бы одно устройство в данном такте передает логический 0. Все устройства, которые в этом такте пытались передать 1, а на шине обнаружили 0, должны отключиться. Поскольку все идентификаторы отличаются друг от друга, через определенное количество тактов на шине останется одно передающее устройство. При известной длительности такта (например, 1 мкс при скорости передачи 1 мб/сек) время арбитража можно точно определить заранее. В стандарте CAN 2.0 А используется 11-битный идентификатор, значит, максимальное время арбитража 11 мкс. Поскольку количество устройств в такой сети всегда заранее известно, время арбитража можно точно рассчитать, что важно для режима жесткого реального времени. Ниже приведена информация из описания стандарта CAN Стандарт CAN
|
||||||||||
|
|
Последнее изменение этой страницы: 2021-05-27; просмотров: 55; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.221.85.33 (0.009 с.) |