Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
З адание для контрольной работы
Вариант задания определяется остатком от деления номера зачетной книжки на число 40. Для нелинейной САУ рассчитать и построить переходный процесс на фазовой плоскости.
Таблица 4.1 - Варианты задания к занятию №4
Продолжение таблицы 4.1
Продолжение таблицы 4.1
Продолжение таблицы 4.1
Вопросы для самоконтроля 1. Дайте определение фазовым переменным и фазовым траекториям. Какие преимущества в расчетах САУ даёт переход к фазовым переменным и траекториям? 2. Какое существует соответствие между графиками переходных процессов и фазовыми траекториями для САУ, характеристическое уравнение которых имеет мнимые корни? Дайте определение автоколебаниям. 3. Какое существует соответствие между графиками переходных процессов и фазовыми траекториями для САУ, характеристическое уравнение которых имеет комплексные корни? 4. Какое существует соответствие между графиками переходных процессов и фазовыми траекториями для САУ, характеристическое уравнение которых имеет действительные корни одинаковых знаков? 5. Какое существует соответствие между графиками переходных процессов и фазовыми траекториями для САУ, характеристическое уравнение которых имеет действительные корни разных знаков? 6. Почему из системы фазовых уравнений нежелательно исключать те переменные, которые являются входным и выходным сигналом нелинейного элемента? 7. Как с учетом графика нелинейности производится разбиение на области фазовой плоскости? Поясните смысл линий переключения. 8. Как рассчитываются и стыкуются между собой участки фазовой траектории? 9. Как установить замкнутость фазовой траектории?
Рекомендуемая литература: [2], [3], [4].
Расчёт и построение переходного процесса на фазовой плоскости
Рекомендации по изучению теоретических вопросов курса
Импульсными называются САУ, в которых содержится хотя бы один блок, в котором информация передается и обрабатывается в импульсном виде. Сложность аналитического описания импульсных сигналов обусловлена следующими причинами: 1) импульсы являются дискретными сигналами и их число в выделенной в САУ линии связи не ограничено (бесконечное большое число); 2) каждый импульс из бесконечной их последовательности не описывается аналитически формулой. Z-преобразованием (преобразованием Лорана) называют свёртывание исходного сигнала, заданного последовательностью вещественных чисел во временно́й области, в аналитическую функцию комплексной частоты. z -изображение от импульсной функции
Пока явственно видно, что запись z -изображение менее громоздка в сравнении с записью преобразованием Лапласа от импульсной функции Теперь развернем z -изображение в ряд
Видно, что ряд представляет собой сумму произведений значений решетчатой функции х (п) на отрицательные степени символа z, причем значение отрицательного показателя степени совпадает с номером импульса, С формальной точки зрения z -изображение представляют собой сумму членов геометрической прогрессии. Основание геометрической прогрессии, каким является символ Принцип действия модуляторов состоит в том, что периодически с непрерывного сигнала x (t) снимается мгновенное значение и запоминается на период Т. В промежутке между съемами значений аналогового сигнала x (t) для импульсов сигнал x (t) может изменяться произвольным способом/ Очевидно, что неопределенность в определении действительного графика x (t) будет уменьшаться с уменьшением периода Т следования импульсов. Если τ min – минимальный период гармонической составляющей разложения в ряд Фурье функции x (t), то период Т следования импульсов, при котором возможно по значениям решетчатой функции однозначно восстановить график x (t), определяется неравенством Котельникова Т ≤ 0,5∙τ min Рассмотрим типовые соединения звеньев импульсных САУ. На рисунке 5.1а приведено последовательное соединение двух звеньев, в линии связи между которыми установлен модулятор, который выходной сигнал v (t) 1-го звена преобразует в АИМ-сигнал v И (t), являющийся входным для 2-го звена. Модуляторы условно показаны ключами, замыкающимися с периодом Т. Для такого соединения можно каждое линейное звено заменить на звено импульсной САУ с ДП
Эквивалентная ДПФ такого соединения будет такой же, как и в линейных САУ
На рисунке 5.1 б приведено последовательное соединение двух звеньев, которые между собой связаны непрерывным сигналом v (t). Условие перехода к ДПФ по формулам нарушено. Эквивалентная ДПФ должна рассчитываться по формуле
Рисунок 5.1 - Последовательное соединение звеньев в импульсной САУ
Для параллельного соединения (рисунок 5.2) эквивалентная ДПФ рассчитывается по формуле
Рисунок 5.2 - Параллельное соединение звеньев в импульсной САУ
Для соединения с отрицательной обратной связью (рисунок 5.3) эквивалентная ДПФ замкнутой САУ рассчитывается по формуле
Два ключа на входе элемента сравнения преобразуют непрерывные сигналы х (t) и y (t) в импульсы хИ (t) и y И (t), которые затем вычитаются, формируя импульс ε И (t) сигнала ошибки. Но тот же импульс ε И (t) может быть получен таким образом, когда сначала вычитаются непрерывные сигналы х (t) и y (t), образуя этим непрерывный сигнал ε (t), а затем он модулятором превращается в импульс ε И (t).
Рисунок 5.3 - Соединение звеньев с обратной связью в импульсной САУ
Далее будем использовать только структурные схемы линейных САУ с ДПФ, полагая, что звенья этой схемы определены корректно. По определению переходным процессом называется реакция САУ на единичный скачок. Если
Далее методы расчета изучим на числовых примерах. При W ЗАМ (z) z -изображение переходного процесса будет следующим
Расчет переходного процесса в импульсной САУ состоит в определении амплитуд импульсов выходного сигнала h (z) или, что эквивалентно, - расчет решетчатой функции h (n). Существуют два метода расчета: 1) метод разложения h (z) в ряд по степеням z - n; 2) табличный метод. В импульсных САУ достаточно прост синтез корректирующего устройства, с которым в САУ устанавливается желаемый переходный процесс. Расчет и построение будут рассмотрены более подробно в примере решения.
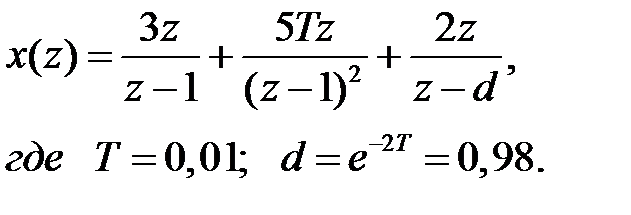
П ример решения А. Для образующей x (t)=3+5t+2е-2t найти изображение x (z), для заданного периодследования импульсов Т= 0,001. Б. Задана передаточная функция разомкнутой САУ:
Для неё: 1. Найти ДПФ замкнутой W ЗАМ (z) импульсной САУ. 2. Рассчитать переходный процесс способом разложения в ряд и табличным способом. Построить график и найти длительность переходного процесса в импульсах. 3. Рассчитать ДПФ последовательного корректирующего устройства, с которым в САУ переходный процесс примет вид:
4. Составить разностное уравнение и алгоритм работы рассчитанного в п.3 корректирующего устройства
Задание Для нелинейной САУ, представленной на рисунке 4.2 рассчитать и построить переходный процесс на фазовой плоскости.
Решение А. Найдем изображение функции:
Подставим значения, получим:
Б. 1. Нахождение ДПФ замкнутой W ЗАМ (z) импульсной САУ ДПФ замкнутой САУ будет следующей:
2. Расчет переходного процесса способом разложения в ряд и табличным способом. Построение графика и нахождение длительности переходного процесса в импульсах. Если
При W ЗАМ (z) z -изображение переходного процесса будет следующим
а. Метод разложения (распаковки) h (z) в ряд по степеням z-n Преобразуем h (z) к стандартному виду
Выполним деление многочлена 0,5 z 2 -0,35 z на многочлен z 2 -1,8 z +0,8
Результатом деления является ряд
коэффициентами которого при степенях z - n являются значения решетчатой функции h (n) переходного процесса. Заполним табл.5.1 и построим график переходного процесса (рисунок 5.4).
Таблица 5.1 - Значения решетчатой функции переходного процесса
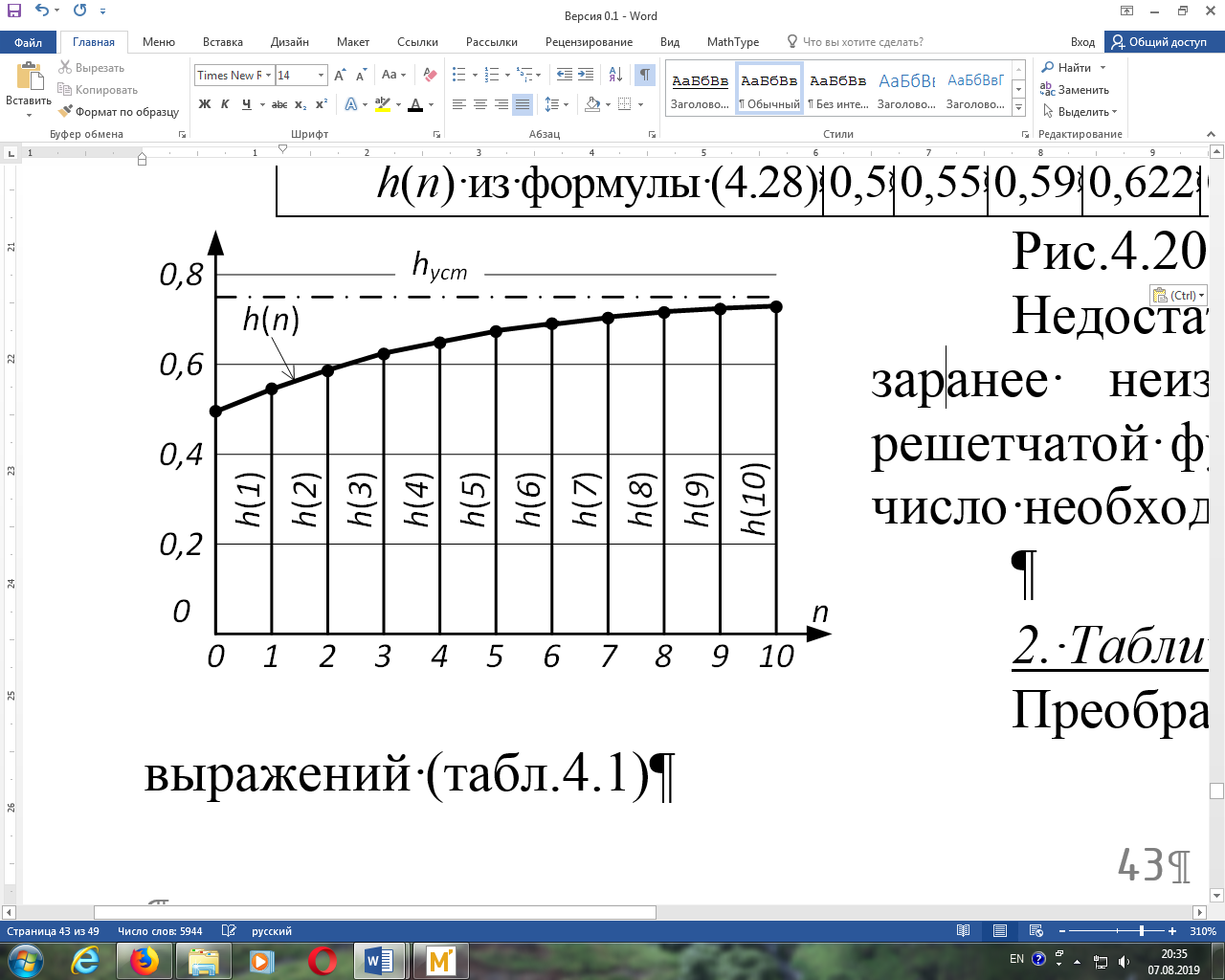
Рисунок 5.4 - График переходного процесса
Недостатком метода является то, что при заранее неизвестном установившемся значении решетчатой функции h (п) является неопределенным число необходимых делений двух многочленов.
б. Табличный метод Преобразуем h (z) к сумме табличных z -выражений:
Для определения коэффициентов А и В составляем и решаем систему уравнений
Находим оригинал h (t):
где α должно быть таким, чтобы было (см. табл.4.1)
В полученном выражении нужно брать дискретное время, значения которого совпадают с периодом Т следования импульсов:
Имея формулу выражения переходного процесса, можно определить установившееся значение переходного процесса и его длительность в импульсах.
Для расчета длительности переходного процесса преобразуем (4.28)
Длительность переходного процесс в импульсах находим из уравнения
5. Расчет ДПФ последовательного корректирующего устройства Одним из требований к САУ может быть формирование заданного графика решетчатой функции переходного процесса. Так в рассчитанный переходный процесс при заданной передаточной функции непрерывной части W ИЧ (s) имеет следующие недостатки: - установившаяся ошибка регулирования составляет 25%, что, безусловно, очень много; - длительность переходного процесса составляет 9 тактов, что также является слишком большой величиной. Структурная схема синтезированной САУ имеет стандартный вид, где корректирующее устройство располагается последовательно с объектом управления, а и имеется единичная отрицательная обратная связь. В качестве корректирующего устройства выберем микропроцессорное. Используя график желаемого переходного процесса h Ж (п), у которого ошибка регулирования составляет 0%, а длительность переходного процесса составляет 2 такта. Значения решетчатой функции h Ж (п) графика желаемого переходного процесса заносим в таблицу 5.2. Далее вычисляем значения решетчатой функции εЖ (п) =1 (п)- h Ж (п) графика желаемой ошибки регулирования и также заносим в таблице 5.2.
Таблица 5.2 - Данные для желаемых графиков h Ж (п) и εЖ(п)
Значение εЖ (п) содержат конечное число ненулевых элементов и бесконечное – нулевых. Используя представление z -изображения в виде ряда, по данным таблицы 5.2 запишем для εЖ (п) конечный ряд
Запишем, используя h Ж (z) =1 (z) -εЖ (z), z -изображение для сигнала h Ж (z):
Используя определение ДПФ, определяем желаемую ДПФ разомкнутой САУ
Так как согласно структурной схемы, изображенной на рис.45.1,
то ДПФ корректирующего устройства будет иметь вид
где W НЧ (z) взято равным выражению ДПФ непрерывной части разомкнутой САУ. Если график желаемого переходного процесса h Ж (п) будет иметь конечное число ненулевых значений и бесконечное – нулевых, то сначала составляется выражение h Ж (z) в виде конечного ряда, а затем вычисляется εЖ (z) =1 (z)- h Ж (z).
6. Составление разностного уравнение для расчета текущего значения выходного импульса и(п) корректирующего устройства Приведем выражение W КУ (z), поделив числитель и знаменатель его на z в максимальной степени:
Составим операторное уравнение корректирующего устройства
Осуществляем переход к уравнению над значениями решетчатых функций сигналов u (z) и ε (z):
Получено разностное уравнение, связывающее арифметическими действиями входные и выходные импульсы корректирующего устройства. Текущее значение выходного сигнала и (п) корректирующего устройства вычисляется по выражению:
Структура выражения показывает, что для определения текущего значения выходного сигнала и (п) корректирующего устройства необходимо взять предшествующие значения выходного и (п-1) и входного ε (п-1) сигналов, предшествующие на 2 такта значения и (п-2) и ε (п-2) и предшествующие на 3 такта значения и (п-3) и ε (п-3) и выполнить над ними вычисления. Предшествующие значения необходимо хранить в оперативном запоминающем устройстве микропроцессорного управляющего устройства.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2021-04-13; просмотров: 60; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.21.76.0 (0.003 с.) |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||

 .
.
 , по модулю меньше единицы, так как именно положительном значении действительной части оператора s вычисляется преобразование Лапласа.Поэтому геометрический ряд в принципе может сходиться, а прогрессия может быть свернута в конечную формулу.
, по модулю меньше единицы, так как именно положительном значении действительной части оператора s вычисляется преобразование Лапласа.Поэтому геометрический ряд в принципе может сходиться, а прогрессия может быть свернута в конечную формулу.






 - z -изображение входного сигнала САУ и W ЗАМ (z) – ДПФ импульсной САУ, то в соответствии с определением ДПФ, z -изображение переходного процесса будет иметь вид
- z -изображение входного сигнала САУ и W ЗАМ (z) – ДПФ импульсной САУ, то в соответствии с определением ДПФ, z -изображение переходного процесса будет иметь вид


 - z -изображение входного сигнала САУ и W ЗАМ (z) – ДПФ импульсной САУ, то в соответствии с определением ДПФ (41.9), z -изображение переходного процесса будет иметь вид
- z -изображение входного сигнала САУ и W ЗАМ (z) – ДПФ импульсной САУ, то в соответствии с определением ДПФ (41.9), z -изображение переходного процесса будет иметь вид