
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Колебания и плавность хода автомобилей
При построении основной эквивалентной колебательной системы для определения собственных частот подрессоренных масс, характеризующих плавность хода автомобиля, достаточно отразить в ней только факторы, вызывающие линейные перемещения
Для составления уравнения движения системы используем уравнение Лагранжа. Кинетическую и потенциальную энергии рассматриваемой системы определим по формулам:
где Приведенную жесткость передней и задней подвесок соответственно, рассчитывают по формулам:
где Дифференцируя систему уравнений (11.1), (11.2) по обобщенным координатам и подставляя значения производных в уравнение Лагранжа, получим систему дифференциальных уравнений вертикальных и продольно-угловых колебаний:
Система дифференциальных уравнений (11.5), (11.6) показывает, что в общем случае координаты
Координаты
Соответствующие этим уравнениям собственные частоты рассчитывают по формулам:
Условие равенства частот вертикальных и угловых колебаний получим, приравняв
При этом принимается, что колебания передних и задних подрессоренных частей независимы и справедливо условие: Собственные частоты передней и задней частей подрессоренных масс можно выразить через соответствующие массы и жесткости:
где
Таким образом, при принятых выше условиях, эквивалентную систему автомобиля можно представить как состоящую из двух подрессоренных передней и задней масс При значениях Частота колебаний связана с угловой частотой известным соотношением:
Плавностью хода автомобиля называют его способность двигаться с заданными эксплуатационными скоростями без значительных толчков и таких колебаний кузова, которые могли бы оказать вредное воздействие на перевозимых пассажиров, повлиять на сохранность груза и автомобиля в целом.
Для обеспечения высокой плавности хода подвеска должна обеспечивать колебания подрессоренной массы (кузова) легковых автомобилей с частотой – n = 0,8 ÷ 1,2 Гц; грузовых автомобилей – n = 1,3 ÷ 1,9 Гц; автобусов – n = 1,2 ÷ 1,6 Гц. Такие частоты соответствуют уровню колебаний тела человека при ходьбе и являются наиболее приемлемыми для организма. Упругая характеристика подвески представляет собой зависимость вертикальной нагрузки
Статический прогиб – перемещение колеса из положения, соответствующего полностью разгруженному состоянию упругого элемента, в положение, занимаемое колесом при воздействии на него номинальной статической нагрузки. Динамический прогиб – перемещение колеса из статического положения в верхнее предельное положение при деформированном ограничителе ходя сжатия (буфере). Упругая характеристика подвески должна проходить через точку При линейной характеристике (0 - b) коэффициент динамичности будет иметь заданное значение, но неудовлетворительную плавность хода (точка Под емкостью подвескипонимают работу, которую необходимо затратить, чтобы деформировать полностью разгруженный упругий элемент (до соприкосновения деталей, ограничивающих деформацию упругого элемента). Динамическая емкость подвески возрастает при увеличении динамического прогиба, однако это приводит к значительному увеличению хода подвески. Возрастание хода подвески приводит к значительным перемещениям кузова относительно колес, что снижает устойчивость автомобиля, повышает требования к направляющему устройству подвески, усложняет условия работы рулевого привода и увеличивает пределы изменения дорожного просвета при независимой подвеске колес. В упругую характеристику (A - a - b) подвески включен буфер отбоя, снижающий ход подвески на величину (0 - A). Масса подрессоренной части, определяющей величину статического прогиба, изменяется на легковых автомобилях для передних подвесок в среднем на 10 ÷ 30%, а для задних на 45 ÷ 60%; у автобусов на 200 ÷ 250% и у грузовых автомобилей на 240 ÷ 400%.
Значительное изменение массы оказывает большое влияние на упругую характеристику подвески. На рисунке приведены также желаемые формы кривых характеристик для порожнего (A -
В общем случае для сохранения постоянства собственной частоты при изменении нагрузки на подвеску необходимо иметь нелинейную характеристику, которая удовлетворяла бы условию:
где Таким образом, для того чтобы кузов автомобиля имел независимо от нагрузки постоянную частоту собственных колебаний, характеристика подвески должна изменяться по закону показательной функции. Существует ряд способов получения нелинейной упругой характеристики желаемого вида. Для того чтобы при линейной характеристике основного упругого элемента получить заданную нелинейную характеристику подвески, обычно применяют несколько дополнительных упругих элементов (подрессорник, дополнительные корректирующие пружины, буферы сжатия и отдачи). При этом дополнительный упругий элемент может применяться для увеличения емкости подвески или для получения заданного статического прогиба. Расчет подвески производится примерно в такой последовательности: 1. рассчитывается кинематика подвески; 2. определяются статическая нагрузка на упругий элемент и его жесткость по заданной нагрузке и жесткости подвески, а также параметры упругого элемента; 3. находится характеристика подвески с выбранным упругим элементом; 4. определяются силы, действующие на элементы направляющего устройства, и производится их расчет на прочность.
|
|||||||
|
|
Последнее изменение этой страницы: 2021-04-12; просмотров: 138; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.14.253.221 (0.014 с.) |
 и угловые перемещения φ подрессоренной массы, и рассматривать ее без учета влияния неподрессоренных масс, демпфирования и возмущающих факторов. При рассмотрении принимаем, что автомобиль симметричен относительно продольной плоскости, поэтому рассматриваем плоскую модель:
и угловые перемещения φ подрессоренной массы, и рассматривать ее без учета влияния неподрессоренных масс, демпфирования и возмущающих факторов. При рассмотрении принимаем, что автомобиль симметричен относительно продольной плоскости, поэтому рассматриваем плоскую модель: Подрессоренной частью автомобиля являются все его элементы, масса которых передается упругими элементами подвески (кузов, рама). Те элементы, масса которых не передается через упругие элементы подвески, называют неподрессоренными элементамиавтомобиля (колеса в сборе, детали направляющих устройств, включая неподрессоренные мосты, часть массы упругих элементов и амортизаторов).
Подрессоренной частью автомобиля являются все его элементы, масса которых передается упругими элементами подвески (кузов, рама). Те элементы, масса которых не передается через упругие элементы подвески, называют неподрессоренными элементамиавтомобиля (колеса в сборе, детали направляющих устройств, включая неподрессоренные мосты, часть массы упругих элементов и амортизаторов). ; (11.1)
; (11.1) , (11.2)
, (11.2) – подрессоренная масса;
– подрессоренная масса;  и
и  – приведенная жесткость передней и задней подвесок соответственно; ρ – радиус инерции подрессоренной массы автомобиля.
– приведенная жесткость передней и задней подвесок соответственно; ρ – радиус инерции подрессоренной массы автомобиля. ; (11.3)
; (11.3) , (11.4)
, (11.4) и
и  – жесткость упругих элементов передней и задней подвесок соответственно;
– жесткость упругих элементов передней и задней подвесок соответственно;  и
и  – жесткость шин передних и задних колес соответственно.
– жесткость шин передних и задних колес соответственно. ; (11.5)
; (11.5) , (11.6)
, (11.6) . В этом случае приложенная сила к центру массы вызывает только вертикальное смещение без поворота. Тогда уравнения (11.5), (11.6) примут вид
. В этом случае приложенная сила к центру массы вызывает только вертикальное смещение без поворота. Тогда уравнения (11.5), (11.6) примут вид ; (11.7)
; (11.7) . (11.8)
. (11.8) ; (11.9)
; (11.9) . (11.10)
. (11.10) и
и  :
: . (11.11)
. (11.11) . Из равенства (11.11) можно найти, что вертикальные и угловые колебания будут равны при
. Из равенства (11.11) можно найти, что вертикальные и угловые колебания будут равны при  .
. ; (11.12)
; (11.12) , (11.13)
, (11.13) ; (11.14)
; (11.14) . (11.15)
. (11.15) и
и  , и опирающихся соответственно на пружины с приведенными жесткостями
, и опирающихся соответственно на пружины с приведенными жесткостями  = 0,8 ÷ 1,2 колебания подрессоренных масс над передней и задней осями являются практически несвязанными, и, следовательно, для нахождения частот свободных колебаний можно пользоваться формулами (11.12), (11.13).
= 0,8 ÷ 1,2 колебания подрессоренных масс над передней и задней осями являются практически несвязанными, и, следовательно, для нахождения частот свободных колебаний можно пользоваться формулами (11.12), (11.13). ; поэтому, если выразить через статический прогиб
; поэтому, если выразить через статический прогиб  , например, частоту колебаний подрессоренных масс на передней подвеске, получим:
, например, частоту колебаний подрессоренных масс на передней подвеске, получим: . (11.16)
. (11.16) на колесо от деформации (прогиба) подвески
на колесо от деформации (прогиба) подвески  , измеренной непосредственно над осью колеса.
, измеренной непосредственно над осью колеса.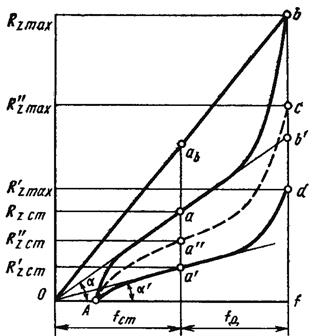 Подвеска характеризуется статическим прогибом
Подвеска характеризуется статическим прогибом  и коэффициентом динамичности, который определяют по формуле:
и коэффициентом динамичности, который определяют по формуле: . (11.17)
. (11.17) , соответствующую полной статической нагрузке и статическому прогибу, характеризующему заданную плавность хода. С другой стороны, для устранения опасности соприкосновения металлических деталей (пробоя) при максимальной деформации упругого элемента, характеристика должна пройти через точку b, определяемую коэффициентом динамичности, причем
, соответствующую полной статической нагрузке и статическому прогибу, характеризующему заданную плавность хода. С другой стороны, для устранения опасности соприкосновения металлических деталей (пробоя) при максимальной деформации упругого элемента, характеристика должна пройти через точку b, определяемую коэффициентом динамичности, причем  = 1,75 ÷ 2,5. Выполнить эти условия можно только при нелинейной характеристике.
= 1,75 ÷ 2,5. Выполнить эти условия можно только при нелинейной характеристике. ). И, наоборот, при характеристике (0 -
). И, наоборот, при характеристике (0 -  ) статический прогиб равен заданному, но возможны частые пробои, вызванные малой динамической емкостью подвески.
) статический прогиб равен заданному, но возможны частые пробои, вызванные малой динамической емкостью подвески. - d) и полузагруженного (A -
- d) и полузагруженного (A -  - c) автомобиля. Необходимо осуществлять изменение жесткости с изменением нагрузки.
- c) автомобиля. Необходимо осуществлять изменение жесткости с изменением нагрузки. , (11.18)
, (11.18) – жесткость подвески в произвольной точке характеристики.
– жесткость подвески в произвольной точке характеристики.


