Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Вопрос 2. Параметры формируемых сигналов.Содержание книги
Поиск на нашем сайте
Формы колебаний. Характеристики колебаний. «Форму колебаний» можно определить, как последовательность изменяющихся значений, повторяющуюся с определенной периодичностью. В природе колебания встречаются на каждом шагу: звуковые колебания, биотоки мозга, океанские волны, световые волны, колебания напряжения и многое другое. Все они представляют собой периодически повторяющиеся процессы. Обычно генераторы сигналов создают электрические колебания (как правило, колебания напряжения), которые повторяются с заданной периодичностью. Время полного повторения волны называется «периодом». Форма колебаний является графическим представлением волнового процесса – изменения его во времени. График волны напряжения представляет собой традиционную диаграмму в декартовых координатах, по горизонтальной оси которой отложено время, а по вертикальной – напряжение. Заметьте, что некоторые приборы могут захватывать или создавать волны тока, мощности и других величин. В настоящем документе мы сосредоточимся на традиционных волнах напряжения. Амплитуда, частота и фаза. Формы колебаний имеют много характеристик, но основными являются амплитуда, частота и фаза. Амплитуда: определяет значение напряжения сигнала. Амплитуда переменного сигнала постоянно изменяется (в русскоязычной литературе амплитудой называют размах или максимальное значение переменной величины, прим. пер.). Генераторы сигналов позволяют задать диапазон напряжений, например, от –3 до +3 вольт. В результате будет генерироваться сигнал, изменяющийся между этими двумя значениями, причем скорость его изменения зависит от формы волны и от частоты. Частота: скорость повторения периодического сигнала. Частота измеряется в Герцах (Гц), или в периодах в секунду. Частота является обратной величиной от периода колебаний, который равен времени между двумя аналогичными значениями в соседних колебаниях. Чем выше частота, тем меньше период. Фаза: теоретически, это положение начала периода колебаний по отношению к точке 0 градусов. Практически, фазой называют смещение начала периода колебания по отношению к опорному колебанию или опорной метке времени.
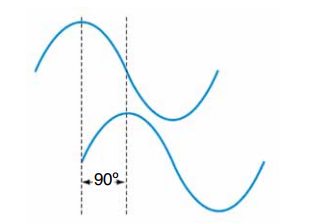
Рисунок 2.1 -Сдвиг фазы (известный также, как задержка) описывает сдвиг по времени между двумя сигналами. Обычно фаза выражается в градусах (как показано на рисунке), но в некоторых случаях удобнее использовать время.
Проще всего объяснить понятие фазы на примере синусоидального сигнала. Уровень напряжения синусоидального сигнала математически связан с круговым движением. Подобно полному обороту, один период синусоиды равен 360 градусам. Фазовый угол синусоиды описывает прошедшую часть полного периода. Два сигнала могут иметь одинаковую частоту и амплитуду, но отличаться по фазе. Сдвиг фазы (известный также, как задержка) описывает сдвиг по времени между двумя аналогичными во всех других отношениях сигналами, как показано на рис. 2.1. В электронике фазовые сдвиги являются широко распространенным показателем. Амплитуда, частота и фаза являются основными характеристиками сигнала, используемыми генератором для оптимизации сигнала в соответствии с требованиями практически любого приложения. Кроме того, имеются и другие характеристики, дополнительно определяющие сигнал, которые также могут регулироваться во многих генераторах. Длительность фронта и спада. Длительности фронта и спада обычно описывают поведение импульсных и прямоугольных сигналов. Эти параметры описывают время, необходимое сигналу для перехода из одного состояния в другое. В современных цифровых схемах эти значения измеряются наносекундами и даже меньшими величинами
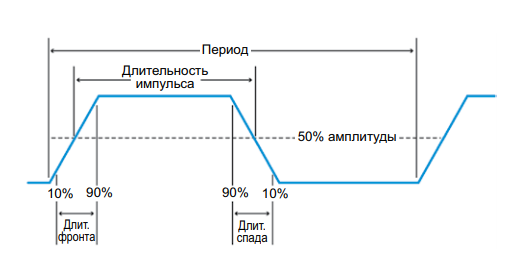
Рисунок 2.2 - Основные параметры импульса.
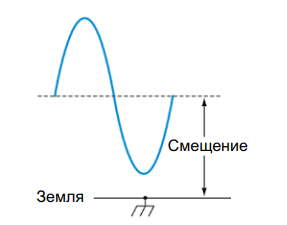
Длительность фронта и спада измеряется как время прохождения сигнала между точками, соответствующими 10% и 90% амплитуды (в некоторых случаях используются точки 20% и 80%). На рис. 2.2 показан типичный импульс и некоторые его характеристики. Примерно такой сигнал вы увидите на экране осциллографа, частота дискретизации которого значительно превышает частоту входного сигнала. При более низких частотах дискретизации сигнал будет выглядеть более «прямоугольным». В некоторых случаях длительности фронта и спада генерируемых импульсов нужно изменять независимо, например, в импульсах, генерируемых для измерения параметров усилителя с несимметричной скоростью отработки, или для управления временем охлаждения лазера в установке для точечной сварки. Длительность импульса. Длительностью импульса называется интервал времени между фронтом и спадом. Заметьте, что термин «фронт» может относиться как к положительному перепаду, так и к отрицательному перепаду, что относится и к термину «спад». Другими словами, эти термины определяют порядок следования событий в течение заданного периода, сама же полярность импульса не влияет на определение его фронта или спада. Длительность импульса определяется временем между точками, соответствующими 50% амплитуды фронта и спада. Другой термин, «коэффициент заполнения», используется для описания относительной длительности высокого и низкого уровня импульса. Например, на рис. 5 показан импульс с коэффициентом заполнения 50% (в русскоязычной литературе используется понятие «скважность» – отношение периода импульса к его длительности, т.е. импульс на рис. 5 имеет скважность 2. Прим. пер.). В отличие от этого, прямоугольный сигнал с периодом 100 нс, активный высокий уровень которого длится 60 нс, будет иметь коэффициент заполнения 60%. Для лучшего понимания коэффициента заполнения представьте себе исполнительный механизм, который для предотвращения перегрева двигателя подает на двигатель односекундный импульс, после чего делает паузу на три секунды. В результате такой привод простаивает три секунды из каждых четырех – т.е. коэффициент заполнения в этом случае равен 25%. Смещение. Не все сигналы изменяются симметрично относительно земли (0 В). Напряжением смещения называют напряжение между нулевым уровнем и центральной линией сигнала. В сущности, напряжение смещения равно постоянной составляющей сигнала, состоящего из суммы переменного и постоянного напряжения, как показано на рис. 2.3.
Рисунок 2.3 - Смещение описывает постоянную составляющую сигнала, состоящего из суммы постоянного и переменного напряжения.
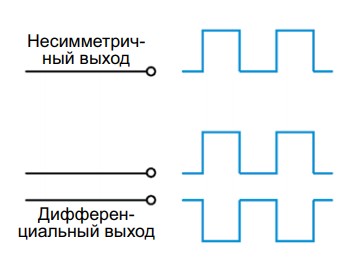
Дифференциальные и несимметричные сигналы. Дифференциальными сигналами называются сигналы, использующие два комплементарных сигнальных тракта, передающих копии одного и того же сигнала прямой и обратной полярности (относительно земли). Если в течение периода сигнала сигнал одного тракта становится более положительным, то сигнал другого тракта становится в равной степени более отрицательным. Например, если в некоторый момент времени значение сигнала в одном из трактов равно +1,5 В, то значение сигнала в другом тракте будет равно -1,5 В (при условии идеальной синфазности сигналов). Дифференциальная линия хорошо подавляет внешние наводки и шумы, пропуская только полезные сигналы. На практике более распространена несимметричная конфигурация, в которой используется лишь один тракт прохождения сигнала и земля. На рис. 2.4 показаны дифференциальный и несимметричный способы передачи сигнала.
Рисунок 2.4 - Несимметричные и дифференциальные сигналы.
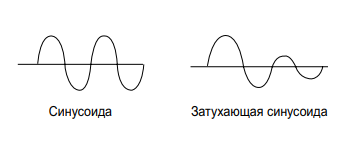
Основные формы сигналов. Сигналы могут иметь всевозможные формы. В большинстве электронных приборов используются сигналы одной или нескольких описанных ниже форм, зачастую с добавлением шума или искажений: ü синусоидальные сигналы; ü меандры и прямоугольные; ü пилообразные и треугольные сигналы; ü перепады и импульсные сигналы; ü сложные сигналы. Синусоидальные сигналы. Синусоидальные сигналы, вероятно, самые узнаваемые из всех сигналов. Большинство источников питания переменного тока вырабатывают именно синусоидальные сигналы. В обычных бытовых электрических розетках в домах присутствует напряжение синусоидальной формы. И практически всегда синусоидальные сигналы используются для демонстрации законов электротехники в учебных лабораториях. Синусоидальный сигнал описывается простой математической функцией – его форму идеально определяет кривая «sin x» в пределах 360 градусов. Специальным случаем синусоиды является затухающая синусоида, которая представляет собой затухающие колебания, возникающие в цепи после подачи на нее импульса. На рис.2.5 приведены примеры синусоидального и затухающего синусоидального сигнала.
Рисунок 2.5- Синусоида и затухающая синусоида.
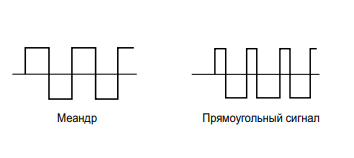
Меандры и прямоугольные сигналы. Меандры и прямоугольные сигналы являются базовыми сигналами, составляющими основу всей цифровой электроники, хотя, конечно, они находят применение и в других областях. Сигнал меандр представляет собой напряжение, переключающееся между двумя фиксированными уровнями через равные интервалы времени. Обычно такие сигналы используются для проверки усилителей, которые должны обрабатывать быстрые переходы между двумя уровнями напряжения (т.е. описанные ранее фронты и спады импульсов). Меандр является идеальным сигналом тактовой частоты для цифровых систем – компьютеров, беспроводных коммуникационных устройств, систем ТВ высокой четкости и многих других систем. Сигнал прямоугольной формы аналогичен по характеристикам меандру, за исключением того, что интервалы высокого и низкого уровня не равны между собой, как описано ранее в пояснении термина «коэффициент заполнения». Примеры меандра и сигнала прямоугольной формы приведены на рис. 2.6.
Рисунок 2.6 - Меандр и прямоугольный сигнал.
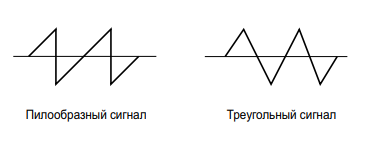
Пилообразные и треугольные сигналы. Пилообразные и треугольные сигналы очень похожи на те геометрические формы, от которых произошли их названия. Пилообразный сигнал в каждом периоде линейно нарастает до пикового значения и затем мгновенно спадает. Треугольный сигнал имеет сопоставимые времена нарастания и спада. Часто такие сигналы используются для управление другими напряжениями, например, в аналоговых осциллографах и телевизорах. Пример пилообразного и треугольного сигнала приведен на рис. 2. 7.
Рисунок 2.7- Пилообразный и треугольный сигнал.
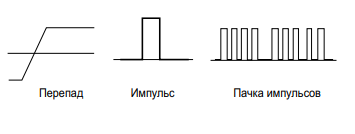
Перепады и импульсы «Перепадом» называют сигнал, демонстрирующий внезапное изменение уровня, например, при замыкании выключателя питания. «Импульс» непосредственно связан с прямоугольным сигналом. Подобно сигналу прямоугольной формы, он получается путем перехода напряжения вверх и затем вниз, или вниз и затем вверх, между двумя фиксированными уровнями. По своей природе импульсы являются двоичными сигналами и поэтомуявляются основным средством передачи информации (данных) в цифровых системах. Импульс может представлять один бит информации, проходящий через компьютер. Группа совместно передаваемых импульсов образует пачку импульсов. Синхронизированная группа пачек (которая может передаваться параллельно или последовательно) образует цифровую последовательность. Примеры перепада, импульса и пачки импульсов приведены на рис. 2. 8. Обратите внимание, что хотя цифровые данные представлены обычно импульсами, сигналами прямоугольной формы или меандрами, реальные цифровые сигналы имеют более округлые углы и пологие фронты. Иногда дефекты цепи приводят к спонтанному возникновению импульсов. Обычно такие переходные сигналы носят непериодический характер и называются «глитчами». Одной из проблем отладки цифровых схем является отделение глитчей от полезных, но узких импульсов данных. И одним из достоинств некоторых типов генераторов является возможность добавления глитчей в пачку импульсов.
Рисунок 2.8 - Перепад, импульс и пачка импульсов.
Сложные сигналы. В реальных электронных системах сигналы редко похожи на описанные выше идеальные формы. Только в некоторых случаях сигналы тактовой частоты или немодулированные несущие имеют форму чистого меандра или синусоиды. Большинство других сигналов имеют более сложную форму вследствие наложения искажений (возникающие из-за таких паразитных явлений, как распределенная емкость, взаимовлияние сигналов и многих других) или модуляции. Некоторые сигналы могут содержать элементы синусоид, меандров, перепадов и импульсов. К сигналам сложной формы относятся: ü сигналы с аналоговой, цифровой, широтно-импульсной и квадратурной модуляцией; ü цифровые последовательности и кодированные цифровые сигналы; ü псевдослучайные потоки битов и слов. Модулированные сигналы. Изменения амплитуды, фазы и/или частоты модулированных сигналов позволяют наложить низкочастотную информацию на сигнал несущей высокой частоты. Результирующие сигналы могут передавать любую информацию от речи до данных и видеоизображений. Если генератор специально не приспособлен для этого, воспроизвести такие сигналы очень сложно. Аналоговая модуляция. В системах радиовещания широко распространена амплитудная (АМ) и частотная (ЧМ) модуляция. В таких типах модуляции модулирующий сигнал изменяет амплитуду или частоту несущей. На приемной стороне цепь демодуляции интерпретирует изменения амплитуды или частоты и извлекает из сигнала необходимую информацию. Фазовая модуляция (ФМ) для наложения полезной информации модулирует фазу несущей. Пример аналоговой модуляции приведен на рис. 2.9.
Рисунок 2.9 - Амплитудная модуляция.
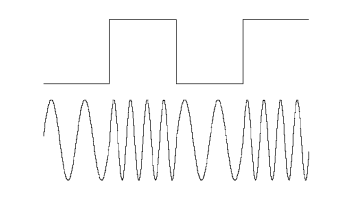
Цифровая модуляция. Подобно другим цифровым технологиям, цифровая модуляция основана на двух состояниях, позволяющих передавать двоичные данные. В системах с амплитудной манипуляцией (АМн) цифровой модулирующий сигнал заставляет сигнал выходной частоты переключаться между двумя значениями амплитуды, в системах с частотной манипуляцией (ЧМн) несущая переключается между двумя частотами (центральной частотой и частотой смещения), а в системах с фазовой манипуляцией (ФМн) несущая переключается между двумя значениями фазы. В ФМн “0” передается сигналом той же фазы, что и предыдущий сигнал, а “1” передается сигналом противоположной фазы. Другим широко распространенным типом цифровой модуляции является широтно-импульсная модуляция (ШИМ); она часто применяется в цифровых аудиосистемах. Как следует из ее названия, она применима только к импульсным сигналам. В системах ШИМ модулирующий сигнал вызывает изменение длительности импульса (описанной выше скважности). Пример цифровой модуляции приведен на рис. 2.10
Рисунок 2. 10 - Частотная манипуляция (ЧМн).
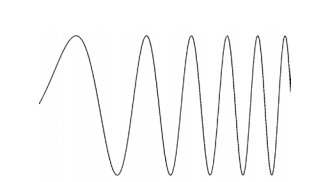
Свипирование по частоте. Измерение частотных характеристик электронного устройства порождает потребность в «свипирующем» синусоидальном сигнале – сигнале, частота которого меняется по определенному закону за определенный период времени. Изменение частоты может происходить линейно и выражаться в «герцах в секунду» или логарифмически и выражаться в «октавах в секунду». Многофункциональные свипирующие генераторы поддерживают свипирование с выбираемой начальной частотой, частотой удержания, конечной частотой и соответствующими интервалами. Кроме того, генератор вырабатывает синхронный со свипированием сигнал запуска, который можно использовать для управления осциллографом, измеряющим выходной отклик исследуемого устройства.
Рисунок 2.11- Синусоидальный сигнал со свипированием по частоте.
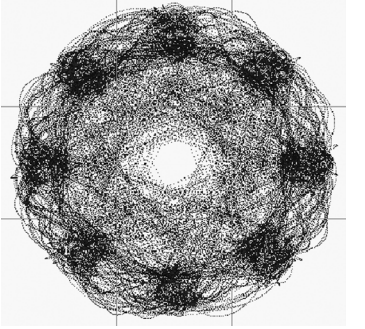
Квадратурная модуляция. В основе современных цифровых сетей беспроводной связи лежит технология квадратурной модуляции (IQ). Квадратурная модуляция использует две несущие – синфазную (I) и квадратурную (Q), сдвинутую ровно на 90 градусов относительно несущей “I”. Эти несущие модулируются так, чтобы получить четыре возможных состояния. На передающей стороне две несущих объединяются и передаются по одному каналу, а на приемной стороне они разделяются и демодулируются. Формат IQ позволяет передать значительно больше информации, чем другие виды аналоговой и цифровой модуляции, что расширяет эффективную полосу системы. Пример квадратурной модуляции приведен на рис.2. 12. Цифровые последовательности и кодированные цифровые сигналы Цифровая последовательность состоит из нескольких синхронизированных потоков импульсов, составляющих одно слово данных, которое может иметь ширину 8, 12, 16 и более битов. Генерацию слов данных для подачи на цифровые шины и процессоры выполняет специальный класс генераторов – генераторы цифровых последовательностей. Слова в этих последовательностях передаются в строгой последовательности циклов, причем активность каждого бита в каждом цикле определяется выбранным методом кодирования. Метод кодирования определяет длительность импульсов внутри циклов, составляющих потоки данных. Ниже приведен список наиболее распространенных методов кодирования. В описании первых трех методов предполагается, что цикл начинается с двоичного значения “0” – т.е. с напряжения низкого логического уровня. Без возврата к нулю (NRZ). При появлении в цикле достоверного бита, сигнал переходит в “1” и остается в этом состоянии до начала следующего цикла. Задержанный без возврата к нулю (DNRZ). Подобен NRZ, за тем исключением, что сигнал переходит в “1” после указанной задержки. С возвратом к нулю (RZ). При появлении достоверного бита, сигнал переходит в “1” и затем возвращается к “0” в пределах этого же цикла. С возвратом к единице (R1): В сущности, этот метод представляет собой инверсию метода RZ. В отличие от других методов, приведенных в этом списке, R1 предполагает, что цикл начинается с “1”, затем при появлении достоверного бита он переключается в “0”, и затем снова возвращается к “1”, до окончания цикла. Двоичные потоки. Псевдослучайные двоичные потоки (PRBS) и псевдослучайные потоки слов (PRWS) используются для преодоления характерного ограничения компьютеров: их неспособности создавать истинно случайные числа. И все же случайные события могут с успехом применяться в цифровых системах. Например, идеально «чистые» цифровые видеосигналы могут содержать неприятные для глаз ступенчатые линии и заметные контуры на поверхностях, которые должны быть гладкими.
Рисунок 2.12 - Квадратурная модуляция.
Добавление контролируемого шума может замаскировать эти артефакты, не оказывая существенного влияния на передаваемую информацию. Для создания случайного шума цифровые системы генерируют поток чисел, которые выглядят случайными, хотя на самом деле определяются предсказуемой математической формулой. На самом деле, такие «псевдослучайные» числа представляют собой набор последовательностей, повторяющихся со случайной частотой. В результате получается PRBS. Псевдослучайный поток слов определяет способ представления нескольких потоков PRBS на нескольких параллельных выходах генератора. PRWS часто используется для тестирования параллельно-последовательных преобразователей или мультиплексоров. Эти устройства преобразуют сигнал PRWS в последовательный поток псевдослучайных битов.
|
||||
|
|
Последнее изменение этой страницы: 2021-04-12; просмотров: 1231; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.138.120.112 (0.01 с.) |