Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Программное обеспечение верхнего уровня АСУТП.
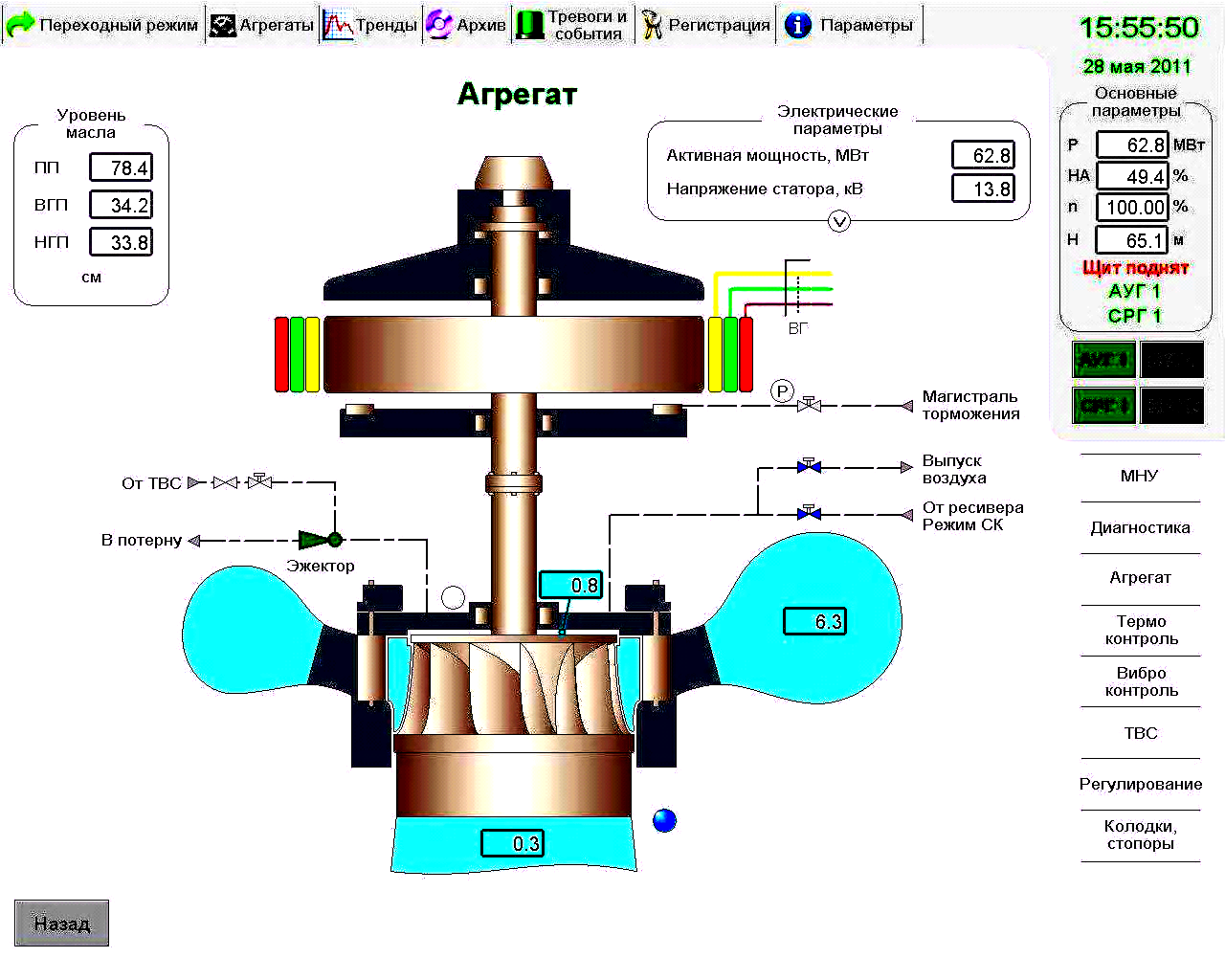
Программное обеспечение (ПО) АСУ ТП ГЭС состоит из системного и технологического. В качестве системного ПО используются стандартные операционные системы реального времени, поставляемые вместе с ЭВМ. Технологическое ПО в основном строится на базе SCADA-систем. S CADA-системы, реализуют функции сбора данных, их графического представления, а также архивацию на базе серверов БД SQL или ORACLE (рис.5). Самыми распространёнными считаются SCADA производства InvensysWonderware, Iconics, Siemens, Indusoft, AdAstra, TRACE MODE, Emerson, RockwellAutomation. Функции SCADA систем. • Сбор и первичная обработка информации о состоянии технологического процесса и оборудования. • Отображение информации о текущих параметрах технологического процесса на экране ПЭВМ в виде графических мнемосхем. • Отображение текущих параметров технологического процесса в реальном времени за заданный интервал. • Вывод на экран технологических аварийных сообщений. • Архивирование параметров технологического процесса. • Оперативное управление технологическим процессом. • Предоставление данных о параметрах технологического процесса в ПТО предприятия. Архивирование — одна из обязательных функций, очень важно иметь возможность «вернуться назад во времени» для разбора «полётов» в случае чего-то непредвиденного либо для глобального анализа при медленных, длительных процессах. Пример применения S CADA-системы.
Рис. 5. Изображение действующего гидроагрегата на экране компьютера начальника смены станции. Изображение гидроагрегата выполнено при помощи системы SCADA. На экран выведены основные параметры гидроагрегата: - фактические мощность и напряжение на шинах; - открытие направляющего аппарата; - уровень масла в подшипниках.
Контрольные вопросы. 1. Цели и задачи АСУТП? 2. Перечислите технологическую информацию которую может выдать АСУТП нижнего уровня дежурному на ЦПУ. 3. Какими устройствами может управлять АСУТП? 4. Какое программное обеспечение используется на верхнем уровне АСУТП и какие функции оно позволяют выполнять?
5. Структурная схема управления АСУТП. Для чего нужны в АСУТП датчики и каковы их функции? Какая информация на входе и какая должна быть на выходе? 6. Структурная схема управления АСУТП. Для чего нужны в АСУТП исполнительные механизмы и каковы их функции? Какая информация на входе и какая должна быть на выходе? 7. Структурная схема управления АСУТП. Для чего нужны в АСУТП модули ввода-вывода и каковы их функции? Какая информация на входе и какая должна быть на выходе? 8. Из каких частей состоит процессорный блок ЦУВМ и какие функции выполняет? 9. Для чего используется пульт управления? 10. Что хранится в ОЗУ? 11. Что хранится в ПЗУ? 12. Для чего используется УВВ? 13. Для чего используется ВЗУ? 14. Какие функции выполняет модуль МВИ? 15. Какие функции выполняет модуль МВУ? 16. Какие функции выполняет АЛУ? 17. Какие функции выполняет УУ? 18. Для чего в ЦУВМ используется клавиатура? 19. В чём заключается принципиальное различие между ОЗУ и ПЗУ? 20. Функции SCADA-систем. 21. Понятие об интерфейсе.
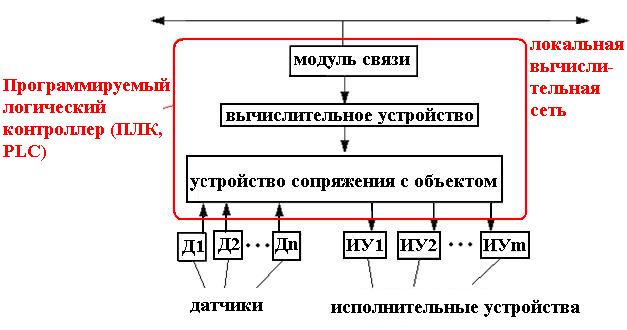
Литература: О.М. Соснин. Основы автоматизации технологических процессов и производств. М. “Академия”. 2007. §1.1 – 1.3. В.Н. Брюханов, А.Г. Схирладзе, В.П. Вороненко. Автоматизация производства. М. “Высшая школа”. 2005. §2.2.3 - 2.2.4. Тема 12.3. Нижний уровень АСУТП. (Программируемые контроллеры). Контроллеры при помощи УСО опрашивают датчики (Д1 – Д n), масштабируют их показанию и передают их при помощи модуля связи по вычислительной сети на верхний уровень АСУТП (рис.6). Кроме опроса датчиков контроллеры выполняют функции автоматического управления технологическими объектами ТО. Управление объектом осуществляется выдачей управляющих сигналов на исполнительные устройства (ИУ1 – ИУ m).
Рис.6. Связи контроллера с верхним уровнем АСУТП и объектом.
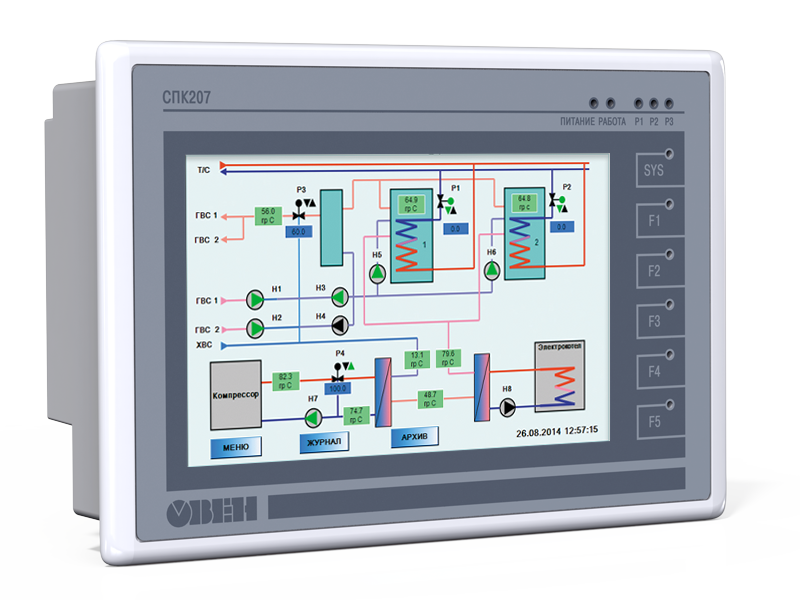
Монитор контроллера.
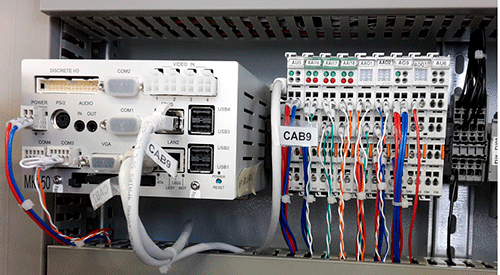
Вид на контроллер сзади. Структура ПЛК. Программируемые контроллеры (PLC — ProgrammableLogicalController) — это выпускаемые серийно управляющие устройства, предназначенные для управления технологическим циклом работы производственного оборудования.
Типичная структура ПЛК представлена на рис.7. Конструктивно ПЛК обычно оформлен в виде двух или трех блоков. Обязательными являются модуль питания, микропроцессорный модуль МПМ и блок программатора.
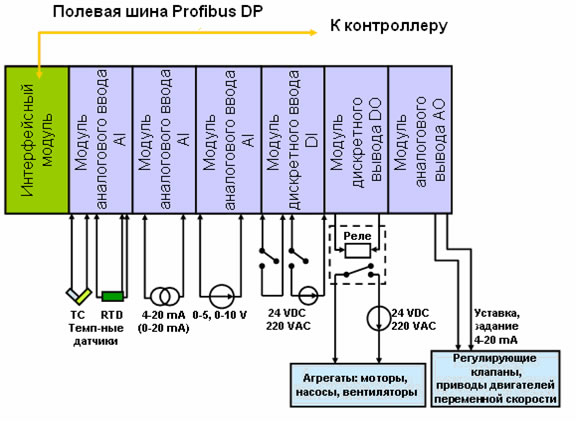
Программатор — это программирующее устройство, с помощью которого управляющая программа вводится в блок ПЛК. Одновременно предусматривается применение переносного клавишного программатора, который используют преимущественно для наладки системы управления, построенной на базе ПЛК. После ввода и отладки УП контроллер реализует заданные управляющие функции, работая в автономном автоматическом режиме. МПМ - микропроцессорное устройство, осуществляет переработку поступающей информации и формирует управляющие сигналы. В нем же находится устройство памяти ПЛК в составе ПЗУ и ОЗУ. В ПЛК нет многозадачной операционной системы типа Windows. Все технологические программы, заложенные в ПЛК, выполняются в цикле. МВВ - модули ввода-вывода служат для ввода информации, поступающей от объекта ТО, и вывода сигналов управления на объект. Различают следующие основные типы МВВ: - ПДТС - приёмники дискретных телесигналов, служат для ввода дискретной информации от ТО. ПДТС характеризует состояние сигналов от объекта типа включено-отключено. - ПРТУ – передатчики дискретных телесигналов, служат для вывода дискретных управляющих сигналов на ТО. ПРТУ выдают при помощи реле управляющие сигналы включить-отключить. - АЦП - аналого-цифровые преобразователи, служат для ввода аналоговых параметров. На входе ток или напряжение, на выходе цифровой код. - ЦАП - цифроаналоговые преобразователи, служат для вывода управляющих аналоговых сигналов. На входе цифровой код, на выходе аналоговый сигнал. Часто управляющие сигналы от модуля ЦАП выдаются на ТО через магнитные усилители. При необходимости в блоке ПЛК устанавливаются различные специализированные МВВ, среди которых — модули для приема импульсных сигналов датчиков перемещений и модули, предназначенные для управления следящими электроприводами. ПЛК обычно устанавливаются непосредственно на объекте или вблизи от него, например, на гидроагрегате. ПЛК считывает с датчиков гидроагрегата информацию, используя блоки АЦП и ПДТС, и направляют её в ЦУВМ. ЦУВМ может выдать на ПЛК решение. ПЛК выдаёт на ТО управляющие сигналы, используя блоки ЦАП и ПРТУ. В локальных АСУТП, с ограниченным числом функций, ПЛК может самостоятельно принимать решение. Например, регулирование скорости вращения гидротурбины. 12.3.2. Модули ввода-вывода (рис.8).
Нижний уровень АСУТП составляют измерительные приборы и исполнительные механизмы. Приборы могут быть аналоговыми или цифровыми (интеллектуальными). Для обмена информацией с приборами необходимо использовать аналого-цифровые преобразователи (АЦП).
Рис. 8. Модули ввода-вывода ПЛК. Блок питания (БП) сделан отдельным модулем, а не устройством, чтобы гарантировать совместимость с данной линейкой ПЛК. Чаще всего входное напряжение у БП 220 В переменного тока, выходное — 24 В постоянного тока. Дискретные (ПДТС) и аналоговые (АЦП) модули обрабатывают соответствующие сигналы от датчиков. Дискретные сигналы, приходящие от датчиков, могут информировать, например, о состоянии насоса включен/выключен. Управляющие дискретные сигналы могут запускать насос, если U=24 В, либо останавливать этот насос, если U=0 В.
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы: • нано-ПЛК (менее 16 каналов); • микро-ПЛК (более 16, до 100 каналов); • средние (более 100, до 500 каналов); • большие (более 500 каналов).
По расположению модулей ввода-вывода ПЛК бывают: • моноблочными - в которых устройство ввода-вывода (МВВ) не может быть удалено из контроллера. • модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Типовое количество слотов для сменных модулей - от 8 до 32; • распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода (МВВ) выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
По конструктивному исполнению и способу крепления контроллеры делятся на: • панельные (для монтажа на панель или дверцу шкафа); • для монтажа на DIN-рейку внутри шкафа; • для крепления на стене; • стоечные - для монтажа в стойке; • бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "OriginalEquipmentManufacturer"). По области применения контроллеры делятся на следующие типы: • универсальные общепромышленные; • для управления роботами; • для управления позиционированием и перемещением; • коммуникационные; • ПИД-контроллеры; • специализированные. По способу программирования контроллеры бывают: • программируемые с лицевой панели контроллера; • программируемые переносным программатором; • программируемые с помощью персонального компьютера. Типовая архитектура ПЛК.
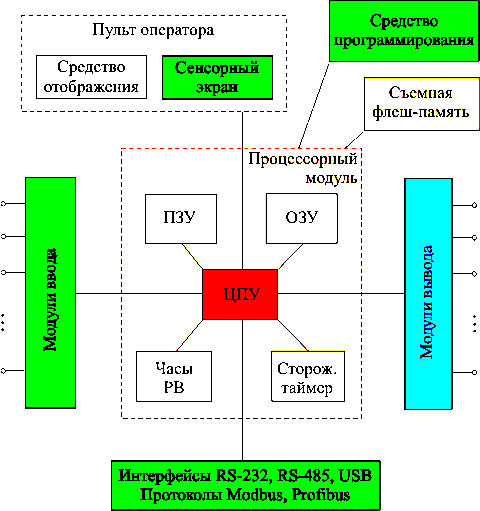
Рис.9. Типовая архитектура ПЛК. Архитектурой контроллера называют набор его основных компонентов и связей между ними. Типовой состав ПЛК включает центральный процессор, память, сетевые интерфейсы и устройства ввода-вывода. Процессорный модуль включает в себя микропроцессор (центральное процессорное устройство - ЦПУ), запоминающие устройства, часы реального времени и сторожевой таймер. Основными характеристиками микропроцессора являются разрядность (в ПЛК используются 8-ми, 16-ти и 32-разрядные микропроцессоры), тактовая частота, архитектура, наличие операций с плавающей точкой, типы поддерживаемых портов ввода-вывода, температурный диапазон работоспособности и потребляемая мощность. Основными типами памяти является постоянное запоминающее устройство (ПЗУ), оперативное запоминающее устройство (ОЗУ) и набор регистров. Регистры являются самыми быстродействующими элементами памяти, поскольку они используются арифметико-логическим устройством (АЛУ) для исполнения элементарных команд процессора. ПЗУ используют для хранения редко изменяемой информации, такой, как операционная система, драйверы устройств, загрузчик, исполняемый модуль программы пользователя. В качестве ПЗУ обычно используется электрически стираемая перепрограммируемая память. ОЗУ используется для хранения данных, которые многократно изменяются в процессе работы контроллера, например, результаты промежуточных вычислений, диагностическая информация, массивы, выводимые на графики, данные для отображения на дисплее. Программирование контроллеров малой мощности выполняется с помощью кнопок, расположенных на лицевой панели или с помощью переносного пульта для программирования. В качестве пульта в последнее время используется компьютер формата "ноутбук". Сторожевой таймер представляет собой счетчик, который считает импульсы тактового генератора и в нормальном режиме периодически сбрасывается (перезапускается) работающим процессором. Если процессор "зависает", то сигналы сброса не поступают в счетчик, он продолжает считать и при достижении некоторого порога вырабатывает сигнал "Сброс" для перезапуска "зависшего" процессора.
Часы реального времени (РВ) представляют собой кварцевые часы, которые питаются от батарейки и поэтому продолжают идти при выключенном ПЛК. Процессорный модуль Процессорный модуль ПЛК выполняет следующие задачи: • собирает данные из модулей ввода в память и отсылает данные из памяти в модули вывода; • выполняет обмен данными с устройством для программирования контроллера; • выдает метки часов реального времени; • осуществляет обмен данными с промышленной сетью; • выполняет начальную загрузку и исполнение операционной системы; • исполняет загрузочный модуль пользовательской программы системы автоматизации; • управляет актами обмена с памятью.
К основным характеристикам процессорного модуля относятся: • тип операционной системы (Windows CE, Linux, DOS, OS-9, QNX и др.); • язык программирования для стандартной системы МЭК 61131-3; • типы поддерживаемых интерфейсов (RS-232, RS-422, RS-485, USB, Ethernet и др.); • типы поддерживаемых сетей (Modbus, Ethernet, Profibus, и др.); • возможность подключения устройств индикации или интерфейса оператора (светодиодного или ЖКИ индикатора, клавиатуры, мыши, дисплея с интерфейсами VGA, DVI или CMOS, LVDS, трекбола и др.); • разрядность (8, 16, 32 или 64 бита); • тактовая частота микропроцессора и памяти; • время выполнения команд; • типы памяти (ОЗУ, кэш, ПЗУ - флэш, съемная флэш и др.); • типы встроенных функций (ПИД-регулятор, счетчики, ШИМ, алгоритмы позиционирования и управления движением и др.); • брендпроизводитель (Intel, AMD, Atmel, Motorola, RealLab! и др.). Быстродействие процессорного модуля ПЛК обычно оценивают по времени выполнения логических команд, поскольку они наиболее распространены при реализации алгоритмов управления. Источник питания Стандартными напряжениями питания ПЛК являются напряжения 12 В, 24 и 48 В. Источником электрической энергии обычно является промышленная сеть 220В, 50 Гц. Низкое напряжение питания позволяет питать контроллеры от аккумуляторов. В ПЛК иногда используют батарею для питания часов реального времени (которые должны функционировать при выключенном ПЛК) и для сохранения информации в ПЗУ на время аварийных перерывов питания.
Контроллер в системах автоматизации выполняет циклический алгоритм, включающий ввод данных и размещение их в ОЗУ, обработку данных и вывод. Длительность контроллерного цикла (его еще называют рабочим циклом) зависит от количества модулей ввода-вывода и наличия в них замаскированных (исключенных из процедуры обмена) входов-выходов, поэтому рассчитывается для каждой конфигурации автоматизированной системы отдельно.
|
||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2021-04-05; просмотров: 181; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.216.32.116 (0.052 с.) |