
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Схема управления электроприводной задвижкой с путевыми и моментными выключателями кулачкового типаСодержание книги
Поиск на нашем сайте
Данная схема применяется для управления электроприводной задвижкой с путевыми и моментными выключателями кулачкового типа. Путевые и моментные выключатели такого типа применяются в электроприводах: ЭПЦ-10000 (з-д «Tomzel», г. Томск), В-А2-11К (ОАО Тулаэлектропривод). Схема управления электроприводной задвижкой состоит из следующих элементов: QF – трехфазный питающий автоматический выключатель; SF – однофазный автоматический выключатель для защиты цепей управления; KM1, KM2 – магнитные пускатели; KM1.1, KM1.2 – вспомогательные контакты первого магнитного пускателя; KM2.1, KM2.2 – вспомогательные контакты второго магнитного пускателя; KK – электротепловое реле; KK1 – размыкающий контакт электротепловое реле; SB1 – кнопка пуска (открытие); SB2 – кнопка пуска (закрытие); SB3 – кнопка стоп; SQ1 – путевой выключатель (концевик открытия); SQ2 – путевой выключатель (концевик закрытия); SQ3 – моментный выключатель (моментник открытия); SQ4 – моментный выключатель (моментник закрытия); HL1 – лампа положения «открыто»; HL2 – лампа положения «закрыто»; HL3 – лампа положения «муфта». Принцип действия схемы. В исходном состоянии схемы все элементы находятся в своем нормальном положении. В данном состоянии схемы электроприводная задвижка находится в промежуточном положении, т.к. контакты путевых и моментных выключателей SQ1 – SQ4 замкнуты (это означает, что кулачки электропривода не действуют на выключатели SQ1 – SQ4). Для готовности схемы к пуску электродвигателя необходимо включить QF и SF. Чтобы открыть задвижку полностью необходимо нажать кнопку SB1, в схеме управления замкнется цепь катушки пускателя КМ1, катушка сработает замкнув силовые контакты КМ1 и вспомогательный контакт KM1.1, а так же разомкнет вспомогательный контакт KM1.2. Контакты пускателя КМ1 запустят электродвигатель, KM1.1 сохранит цепь управления катушки пускателя КМ1 во включенном положении, KM1.2 разомкнет цепь управления катушки пускателя КМ2 от ошибочного пуска. Электродвигатель будет работать до момента подхода кулачка к путевому выключателю SQ1 в блоке электропривода (при настройке кулачка в открытом положении задвижки). В момент нажатия кулачка на SQ1, путевой выключатель размыкает цепь управления катушки пускателя КМ1 и замыкает цепь сигнализации HL1. Электродвигатель остановится, загорится лампа HL1 положения «открыто». Для закрытия задвижки необходимо нажать кнопку SB2, в схеме управления замкнется цепь катушки пускателя КМ2, катушка сработает замкнув силовые контакты КМ2 и вспомогательный контакт KM2.1, а так же разомкнет вспомогательный контакт KM2.2 аналогично схеме пускателя КМ1. Контакты пускателя КМ2 запустят электродвигатель в противоположном направлении, т.к. выводы с пускателя КМ2 подключены к электродвигателю с изменением фаз А и С. Электродвигатель будет работать до момента подхода кулачка к путевому выключателю SQ2 в блоке электропривода (при настройке кулачка в закрытом положении задвижки). В момент нажатия кулачка на SQ2, путевой выключатель размыкает цепь управления катушки пускателя КМ2 и замыкает цепь сигнализации HL2. Электродвигатель остановится, загорится лампа HL2 положения «закрыто». Для закрытия задвижки необходимо нажать кнопку SB2, в схеме управления замкнется цепь катушки пускателя КМ2, катушка сработает замкнув силовые контакты КМ2 и вспомогательный контакт KM2.1, а так же разомкнет вспомогательный контакт KM2.2 аналогично схеме пускателя КМ1. Контакты пускателя КМ2 запустят электродвигатель в противоположном направлении, т.к. выводы с пускателя КМ2 подключены к электродвигателю с изменением фаз А и С. Электродвигатель будет работать до момента подхода кулачка к путевому выключателю SQ2 в блоке электропривода (при настройке кулачка в закрытом положении задвижки). В момент нажатия кулачка на SQ2, путевой выключатель размыкает цепь управления катушки пускателя КМ2 и замыкает цепь сигнализации HL2. Электродвигатель остановится, загорится лампа HL2 положения «закрыто». При возникновении отказа срабатывания путевых выключателей SQ1 и SQ2 схемой предусмотрено резервное отключение электродвигателя моментными выключателями SQ3 и SQ4. С помощью дополнительных настроек кулачков и срабатывания моментных выключателями SQ3 и SQ4. При срабатывании SQ3 и SQ4 размыкаются их контакты в схеме управления пускателями КМ1, КМ2 и замыкаются контакты в схеме сигнализации, загорается лампа HL2 положения «муфта». ЧАСТОТНЫЙ ПУСК Частотный пуск осуществляется с помощью частотных преобразователей. Частотные преобразователи предназначены для плавного регулирования скорости асинхронного двигателя за счет создания на выходе преобразователя трехфазного напряжения переменной частоты. Статические преобразователи частоты являются наиболее совершенными устройствами управления асинхронным приводом в настоящее время. Принцип частотного метода регулирования скорости асинхронного двигателя заключается в том, что, изменяя частоту
неизменном числе пар полюсов Этот способ обеспечивает плавное регулирование скорости в широком диапазоне, а механические характеристики обладают высокой жесткостью. Регулирование скорости при этом не сопровождается увеличением скольжения асинхронного двигателя, поэтому потери мощности при регулировании невелики. Для получения высоких энергетических показателей асинхронного двигателя – коэффициентов мощности, полезного действия, перегрузочной способности – необходимо одновременно с частотой изменять и подводимое напряжение. Закон изменения напряжения зависит от характера момента нагрузки
Таким образом, для плавного бесступенчатого регулирования частоты вращения вала асинхронного электродвигателя, преобразователь частоты должен обеспечивать одновременное регулирование частоты и напряжения на статорной обмотке асинхронного двигателя. Преимущества использования регулируемого электропривода в технологических процессах. Применение регулируемого электропривода обеспечивает энергосбережение и позволяет получать новые качества систем и объектов. Значительная экономия электроэнергии обеспечивается за счет регулирования какого-либо технологического параметра. Если это транспортер или конвейер, то можно регулировать скорость его движения. Если это насос или вентилятор – можно поддерживать давление или регулировать производительность. Если это станок, то можно плавно регулировать скорость подачи или главного движения. Особый экономический эффект от использования преобразователей частоты дает применение частотного регулирования на объектах, обеспечивающих транспортировку жидкостей. До сих пор самым распространённым способом регулирования производительности таких объектов является использование задвижек или регулирующих клапанов, но сегодня доступным становится частотное регулирование асинхронного двигателя, приводящего в движение, например, рабочее колесо насосного агрегата или вентилятора. При использовании частотных регуляторов обеспечивается плавная регулировка скорости вращения позволяет в большинстве случаев отказаться от использования редукторов, вариаторов, дросселей и другой регулирующей аппаратуры. При подключении через частотный преобразователь пуск двигателя происходит плавно, без пусковых токов и ударов, что снижает нагрузку на двигатель и механизмы, тем самым увеличивает срок их службы. Структура частотного преобразователя. Большинство современных преобразователей частоты построено по схеме двойного преобразования. Они состоят из следующих основных частей: звена постоянного тока (неуправляемого выпрямителя), силового импульсного инвертора и системы управления. Звено постоянного тока состоит из неуправляемого выпрямителя и фильтра. Переменное напряжение питающей сети преобразуется в нем в напряжение постоянного тока. Силовой трехфазный импульсный инвертор состоит из шести транзисторных ключей. Каждая обмотка электродвигателя подключается через соответствующий ключ к положительному и отрицательному выводам выпрямителя. Инвертор осуществляет преобразование выпрямленного напряжения в трехфазное переменное напряжение нужной частоты и амплитуды, которое прикладывается к обмоткам статора электродвигателя.
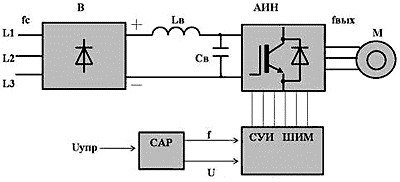
В выходных каскадах инвертора в качестве ключей используются силовые IGBT-транзисторы. По сравнению с тиристорами они имеют более высокую частоту переключения, что позволяет вырабатывать выходной сигнал синусоидальной формы с минимальными искажениями. Принцип работы преобразователя частоты. Преобразователь частоты состоит из неуправляемого диодного силового выпрямителя В, автономного инвертора, системы управления ШИМ, системы автоматического регулирования, дросселя Lв и конденсатора фильтра Cв (рис. 9.40). Регулирование выходной частоты fвых и напряжения Uвых осуществляется в инверторе за счет высокочастотного широтно-импульсного управления. Широтно-импульсное управление характеризуется периодом модуляции, внутри которого обмотка статора электродвигателя подключается поочередно к положительному и отрицательному полюсам выпрямителя.
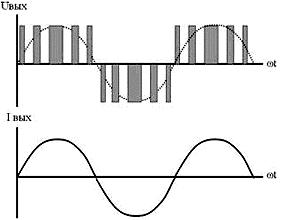
Длительность этих состояний внутри периода ШИМ модулируется по синусоидальному закону. При высоких (обычно 2…15 кГц) тактовых частотах ШИМ, в обмотках электродвигателя, вследствие их фильтрующих свойств, текут синусоидальные токи.
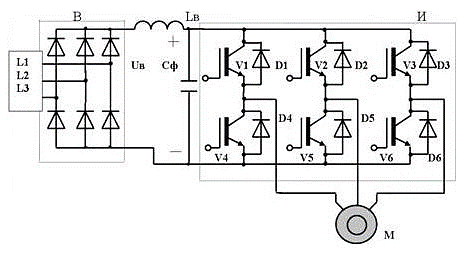
Таким образом, форма кривой выходного напряжения представляет собой высокочастотную двухполярную последовательность прямоугольных импульсов (рис. 9.41). Частота импульсов определяется частотой ШИМ, длительность (ширина) импульсов в течение периода выходной частоты АИН промодулирована по синусоидальному закону. Форма кривой выходного тока (тока в обмотках асинхронного электродвигателя) практически синусоидальна. Регулирование выходного напряжения инвертора можно осуществить двумя способами: амплитудным (АР) за счет изменения входного напряжения Uв и широтно-импульсным (ШИМ) за счет изменения программы переключения вентилей V1-V6 при Такое управление позволяет получить высокий КПД преобразователя и эквивалентно аналоговому управлению с помощью частоты и амплитуды напряжения. Современные инверторы выполняются на основе полностью управляемых силовых полупроводниковых приборов – запираемых GTO – тиристоров, либо биполярных IGBT-транзисторов с изолированным затвором. На рис. 9.42 представлена 3-х фазная мостовая схема автономного инвертора на IGBT-транзисторах. Она состоит из входного емкостного фильтра Cф и шести IGBT-транзисторов V1-V6 включенными встречно-параллельно диодами обратного тока D1-D6. За счет поочередного переключения вентилей V1-V6 по алгоритму, заданному системой управления, постоянное входной напряжение Uв преобразуется в переменное прямоугольно-импульсное выходное напряжение. Через управляемые ключи V1-V6 протекает активная составляющая тока асинхронного электродвигателя, через диоды D1-D6 – реактивная составляющая тока.
ПРЕОБРАЗОВАТЕЛИ ЧАСТОТЫ, ПРИМЕНЯЕМЫЕ НА ОБЪЕКТАХ ОСТ
|
||||||||||||||
|
|
Последнее изменение этой страницы: 2021-03-09; просмотров: 961; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.144.249.63 (0.012 с.) |

 питающего напряжения, можно в соответствии с выражением
питающего напряжения, можно в соответствии с выражением
 изменять угловую скорость магнитного поля статора.
изменять угловую скорость магнитного поля статора. . При постоянном моменте нагрузки
. При постоянном моменте нагрузки  напряжение на статоре должно регулироваться пропорционально частоте:
напряжение на статоре должно регулироваться пропорционально частоте:
 . Второй способ получил распространение в современных преобразователях частоты благодаря развитию современной элементной базы (микропроцессоры, IBGT-транзисторы). При широтно-импульсной модуляции форма токов в обмотках статора асинхронного двигателя получается близкой к синусоидальной благодаря фильтрующим свойствам самих обмоток.
. Второй способ получил распространение в современных преобразователях частоты благодаря развитию современной элементной базы (микропроцессоры, IBGT-транзисторы). При широтно-импульсной модуляции форма токов в обмотках статора асинхронного двигателя получается близкой к синусоидальной благодаря фильтрующим свойствам самих обмоток.


