
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Принципиальной схемы сарв СГСодержание книги
Поиск на нашем сайте
СОДЕРЖАНИЕ Введение………………………………………………………………………...…7 1. Обоснование и разработка принципиальной схемы САРВ СГ…………...…8 2. Выбор силовых вентилей для выпрямителя в цепи возбуждения ССГ.........9 3. Определение передаточных функций элементов системы. Составление структурной схемы САРВ СГ. Определение передаточных функций системы………………………………………………………………………..10 4. Расчет и выбор основных параметров (коэффициентов передачи и постоянных времени) САРВ СГ……………………………………………..14 5. Исследование устойчивости САРВ СГ……………………………………...21 6. Уточнение коэффициента передачи ТФК по цепи компаундирования и выбор коэффициента передачи разомкнутой системы из условия обеспечения точности регулирования…………………………………...….24 7. Уточнение коэффициента передачи разомкнутой системы из условия обеспечения заданных динамических свойств……………………………...26 8. Математическое моделирование САРВ СГ на ПЭВМ……………………...27 9. Определение установившихся ошибок САРВ СГ…………………………..29 10. Исследование САРВ СГ с помощью частотных характеристик…………...29 Заключение…………….………………………………………………………....30 Список литературы……………….……………………...………………………32
ВВЕДЕНИЕ
Преобразование механической энергии в электрическую энергию в настоящее время осуществляется с помощью синхронных генераторов (СГ). Энергоагрегаты с синхронными генераторами являются основными источниками электроэнергии автономных систем электроснабжения военных объектов. Бесперебойность электроснабжения и качество электроэнергии во многом определяют боеспособность и боеготовность объектов МО и отдельных военных потребителей. Качество вырабатываемой электроэнергии СГ зависит от величины, характера и динамичности нагрузки. Наличие системы автоматического регулирования возбуждения у СГ во многом способствует повышению качества вырабатываемой электроэнергии генераторами как в статическом, так и в динамическом режимах работы. В настоящее время известны различные варианты построения и регулирования возбуждения СГ: с электромашинными возбудителями, со статической системой возбуждения на неуправляемых и управляемых вентилях, бесщеточные системы возбуждения и т. д. Задача синтеза системыавтоматического регулирования заключается в выборе такой ее структуры, параметров, характеристик и способов реализации, которые удовлетворяют требованиям, предъявляемым к системе. На практике довольно часто задается так называемая неизменяемая часть синтезируемой системы, состоящая из исполнительного устройства (ИУ) и собственно объекта регулирования (ОР) (рис.1).
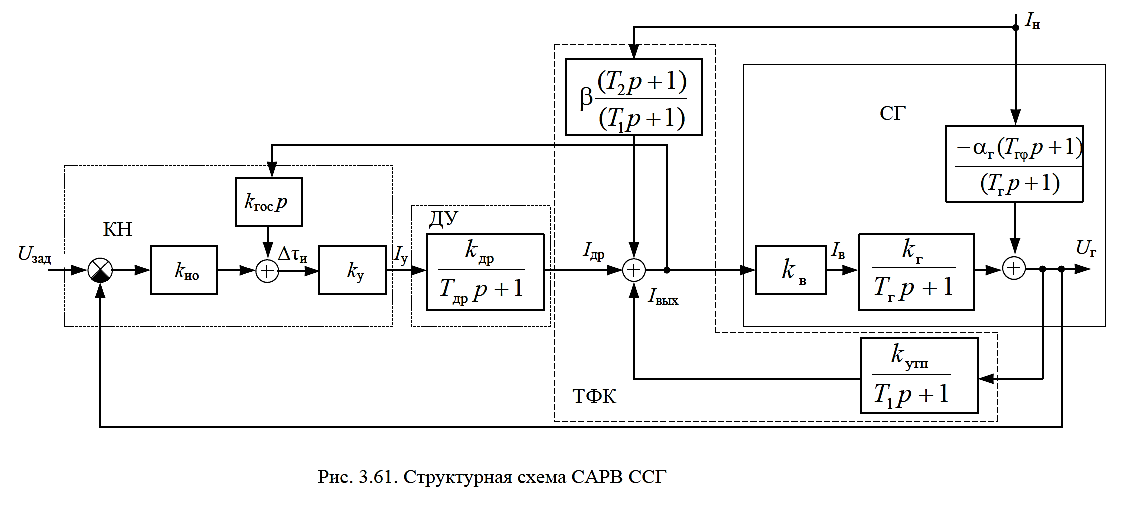
При решении задачи синтеза САРВ СГ будем считать, что заданы управляемый объект – синхронный генератор, его параметры и структура системы. Необходимо выбрать такие значения варьируемых параметров (коэффициентов передачи, постоянных времени регулятора), при которых обеспечивается выполнение технических требований к системе – требуемая точность и приемлемый характер переходных процессов. ОБОСНОВАНИЕ И РАЗРАБОТКА ВЫБОР СИЛОВЫХ ВЕНТИЛЕЙ ОПРЕДЕЛЕНИЕ ПЕРЕДАТОЧНЫХ ФУНКЦИЙ Структурная схема САРВ СГ Составим из отдельных представленных блоков структурную схему САРВ СГ.
САРВ СГ Устойчивость автоматического регулирования возбуждения в значительной степени определяется режимом работы синхронных генераторов. Ввиду того что холостой ход генератора является наиболее тяжелым в отношении устойчивости регулирования напряжения, дальнейший расчет коэффициентов передачи необходимо производить именно для этого режима.
Коэффициент передачи СГ по возмущающему воздействию (току и c os φ нагрузки) Коэффициент передачи определяется аналитически по формуле:
где
Коэффициент передачи цепи возбуждения Коэффициент передачи
Расчет и выбор параметров Критерий Гурвица Швейцарский математик А. Гурвиц предложил критерий для определения устойчивости линейных автоматических систем любого порядка. Критерий Гурвица, отличающийся простотой и наглядностью, получил широкое распространение. Исходной информацией для использования этого критерия является характеристическое уравнение исследуемой системы. Для системы любого порядка можно получить выражения условий устойчивости. С увеличением порядка характеристического уравнения условия устойчивости усложняются. Практически для решения задачи синтеза критерий Гурвица используется лишь для систем не выше четвертого порядка. Для системы второго порядка условия устойчивости следующие:
Характеристическое уравнение второго порядка имеет вид:
Чтобы его получить, необходимо найти характеристический полином замкнутой системы.
где k = k ио k в k у k др k г;
Условия устойчивости:
Условия выполняются, следовательно, данная система является устойчивой.
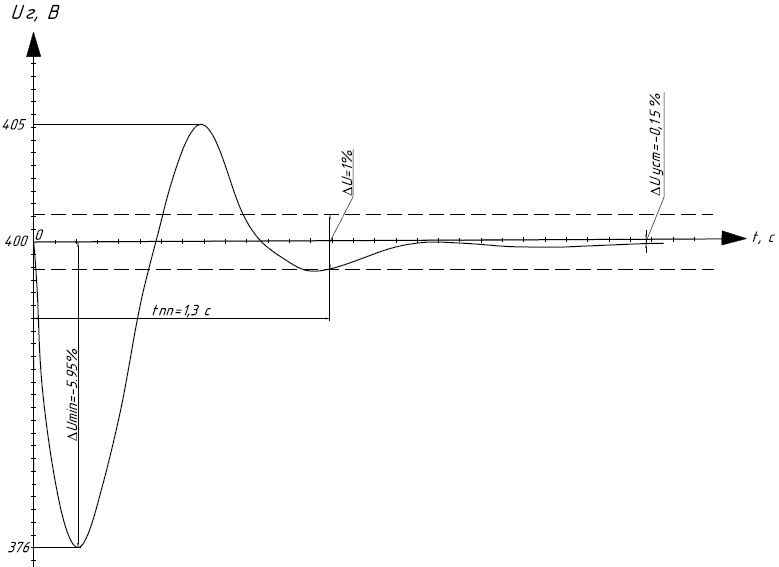
САРВ СГ НА ПЭВМ Математическое моделирование режима наброса 100% нагрузки с cos φ = 0,8 проектируемой САРВ СГ проводится на ПЭВМ по программе Proekt 42. Программа составлена и записана на языке программирования ПАСКАЛЬ. Программа составлена в диалоговом режиме. После ввода в программу всех значений параметров моделируемой системы, результаты решения могут быть представлены либо в виде таблицы (табл.9.1), либо в виде графика переходного процесса (рис.8.1). Т а б л и ц а 8.1 T, с |
U, В | δU, % | |||||
| 0 | 400,00 | 0 | ||||||
| 0,1 | 376,00 | -5,95 | ||||||
| 0,2 | 383,00 | -4,24 | ||||||
| 0,3 | 391,00 | -2,08 | ||||||
| 0,4 | 399,00 | -0,22 | ||||||
| 0,5 | 403,00 | 0,94 | ||||||
| 0,6 | 405,00 | 1,36 | ||||||
| 0,7 | 404,00 | 1,19 | ||||||
| 0,8 | 402,00 | 0,71 | ||||||
| 0,9 | 400,00 | 0,17 | ||||||
| 1,0 | 399,00 | -0,25 | ||||||
| 1,1 | 398,00 | -0,48 | ||||||
| 1,2 | 397,00 | -0,53 | ||||||
| 1,3 | 398,20 | -0,46 | ||||||
| 1,4 | 398,70 | -0,32 | ||||||
| 1,5 | 399,30 | -0,19 | ||||||
| 1,6 | 399,60 | -0,09 |


 =
=  · sin φ+
· sin φ+  · cos φ [Ом],
· cos φ [Ом], ,
,  , Ом.
, Ом.
 [В/А] является коэффициентом пропорциональности между током возбуждения и напряжением возбуждения CСГ, численно равным сопротивлению обмотки возбуждения CСГ в нагретом состоянии:
[В/А] является коэффициентом пропорциональности между током возбуждения и напряжением возбуждения CСГ, численно равным сопротивлению обмотки возбуждения CСГ в нагретом состоянии: = 0,155 Ом.
= 0,155 Ом. ;
;  ;
;  .
. .
. ,
, ;
; .
. ;
; ;
; .
.
 ;
;
 ;
; ;
;
Окончание табл.8.1
| 1,7 | 399,81 | -0,05 |
| 1,8 | 399,80 | -0,05 |
| 1,9 | 399,69 | -0,08 |
| 2,0 | 399,55 | 0,11 |
| 2,1 | 399,42 | 0,14 |
| 2,2 | 399,34 | 0,16 |
| 2,3 | 399,31 | 0,17 |
| 2,4 | 399,33 | 0,17 |
| 2,5 | 399,36 | 0,16 |
| 2,6 | 399,40 | 0,15 |
| 2,7 | 399,43 | 0,14 |
| 2,8 | 399,44 | 0,14 |
| 2,9 | 399,45 | 0,14 |
| 3,0 | 399,44 | 0,14 |
| 3,1 | 399,43 | 0,14 |
| 3,2 | 399,42 | 0,14 |
| 3,3 | 399,41 | -0,15 |
| 3,4 | 399,41 | -0,15 |
| Рис.8.1. График переходного процесса |
В ходе математического моделирования были уточнены следующие коэффициенты:

 .
.
Полученные параметры САРВ СГ принимаем за окончательные.
ИССЛЕДОВАНИЕ САРВ СГ
ЗАКЛЮЧЕНИЕ
В данном курсовом проекте была смоделирована система автоматического регулирования возбуждения самовозбуждающегося синхронного генератора с неуправляемыми выпрямителями в цепи возбуждения, обеспечивающую потребителей электрической энергией переменного тока частотой 50 Гц. В ходе работы были рассчитаны параметры системы, которые обеспечивают требуемую устойчивость САРВ СГ при отклонении всевозможных параметров системы от номинала и влияния на систему дестабилизирующих воздействий. Однако, одного понятия «устойчивость системы» не достаточно, она должна удовлетворять следующим требованиям:
– точность поддержания напряжения генератора в установившемся режиме по основному возмущению в пределах 1%. Разработанная система имеет отклонение в 0,175%, что полностью удовлетворяет нашим требованиям;
– максимальный провал напряжения генератора в процентах от номинального значения при включении номинальной статической нагрузки по току с cos φ = 0,8 в пределах +15% и -20%. Показатели спроектированной системы по данному параметру составляют +1,36% и -5,95% соответственно;
– число колебаний напряжения генератора за время переходного процесса не более 2…3. В ходе математического моделирования САРВ СГ был получен график переходного процесса, который имел 3 колебания.
– время переходного процесса не более 5 с. Спроектированная система при включении номинальной статической нагрузки по току «восстанавливается» за 1,3 с.
Во время выполнения курсового проектирования целевая установка была выполнена в полном объеме, так же, закреплены и углублены теоретические знания по дисциплине «Автоматизация систем электроснабжения специальных объектов» и приобретены практические навыки по проектированию и исследованию систем автоматического регулирования возбуждения самовозбуждающегося синхронного генератора.
СПИСОК ЛИТЕРАТУРЫ
1. Карагодин В.В. Проектирование систем автоматического регулирования возбуждения синхронных генераторов. Учебно-методическое пособие – СПб.: ВКА им. А.Ф.Можайского, 2010 – 130 с.
2. Карагодин В.В., Герасимов А.И., Пешехонов Н.Е., Ревяков Б.А. Теория автоматического управления. Линейные системы автоматического управления. Учебное пособие - СПб.: ВКА им. А.Ф.Можайского, 2014 – 208 с.
3. Карагодин В.В., Горин В.А., Рыбаков Д.В. Автоматизация систем электроснабжения специальных объектов. Практикум - СПб.: ВКА им. А.Ф.Можайского, 2016 – 105 с.
4. Конспект лекций по дисциплине «Автоматизация систем электроснабжения специальных объектов».
СОДЕРЖАНИЕ
Введение………………………………………………………………………...…7
1. Обоснование и разработка принципиальной схемы САРВ СГ…………...…8
2. Выбор силовых вентилей для выпрямителя в цепи возбуждения ССГ.........9
3. Определение передаточных функций элементов системы. Составление структурной схемы САРВ СГ. Определение передаточных функций системы………………………………………………………………………..10
4. Расчет и выбор основных параметров (коэффициентов передачи и постоянных времени) САРВ СГ……………………………………………..14
5. Исследование устойчивости САРВ СГ……………………………………...21
6. Уточнение коэффициента передачи ТФК по цепи компаундирования и выбор коэффициента передачи разомкнутой системы из условия обеспечения точности регулирования…………………………………...….24
7. Уточнение коэффициента передачи разомкнутой системы из условия обеспечения заданных динамических свойств……………………………...26
8. Математическое моделирование САРВ СГ на ПЭВМ……………………...27
9. Определение установившихся ошибок САРВ СГ…………………………..29
10. Исследование САРВ СГ с помощью частотных характеристик…………...29
Заключение…………….………………………………………………………....30
Список литературы……………….……………………...………………………32
ВВЕДЕНИЕ
Преобразование механической энергии в электрическую энергию в настоящее время осуществляется с помощью синхронных генераторов (СГ). Энергоагрегаты с синхронными генераторами являются основными источниками электроэнергии автономных систем электроснабжения военных объектов. Бесперебойность электроснабжения и качество электроэнергии во многом определяют боеспособность и боеготовность объектов МО и отдельных военных потребителей.
Качество вырабатываемой электроэнергии СГ зависит от величины, характера и динамичности нагрузки. Наличие системы автоматического регулирования возбуждения у СГ во многом способствует повышению качества вырабатываемой электроэнергии генераторами как в статическом, так и в динамическом режимах работы.
В настоящее время известны различные варианты построения и регулирования возбуждения СГ: с электромашинными возбудителями, со статической системой возбуждения на неуправляемых и управляемых вентилях, бесщеточные системы возбуждения и т. д.
Задача синтеза системыавтоматического регулирования заключается в выборе такой ее структуры, параметров, характеристик и способов реализации, которые удовлетворяют требованиям, предъявляемым к системе.
На практике довольно часто задается так называемая неизменяемая часть синтезируемой системы, состоящая из исполнительного устройства (ИУ) и собственно объекта регулирования (ОР) (рис.1).
| Рис.1. Представление САРВ СГ при решении задачи синтеза |
При решении задачи синтеза САРВ СГ будем считать, что заданы управляемый объект – синхронный генератор, его параметры и структура системы.
Необходимо выбрать такие значения варьируемых параметров (коэффициентов передачи, постоянных времени регулятора), при которых обеспечивается выполнение технических требований к системе – требуемая точность и приемлемый характер переходных процессов.
ОБОСНОВАНИЕ И РАЗРАБОТКА
ПРИНЦИПИАЛЬНОЙ СХЕМЫ САРВ СГ
Система автоматического регулирования возбуждения синхронного генератора представляет собой динамическую систему, состоящую из объекта регулирования – синхронного генератора и автоматического управляющего устройства – автоматического регулятора возбуждения, взаимодействующих между собой.
Регулируемой величиной в системе автоматического регулирования возбуждения синхронного генератора является напряжение генератора Uг, управляющей величиной – напряжение возбуждения Uв или ток возбуждения Iв генератора. Основное внешнее (возмущающее) воздействие на генератор и его выходное напряжение оказывают ток нагрузки Iн = Iг и коэффициент мощности cos φ.
Автоматические регуляторы возбуждения строятся на современных ДЭС, как правило, на основе принципа комбинированного регулирования и представляют собой вместе с объектом регулирования систему управляемого фазового компаундирования (рис.1.1).
| Рис.1.1. Функциональная схема комбинированной системы стабилизации напряжения СГ |
Комбинированные системы стабилизации напряжения состоят из контура компаундирования (регулятора по возмущению РВ - система фазового компаундирования) и цепи коррекции напряжения (регулятора по отклонению РО – корректор напряжения).
Такие регуляторы применяются как для генераторов с независимым возбуждением (имеющим электромашинный возбудитель в виде генератора постоянного тока), так и для генераторов с самовозбуждением ССГ. Причем основные принципы построения таких регуляторов для тех и других генераторов одинаковы.
Объектом регулирования является самовозбуждающийся синхронный генератор, имеющий статическую систему возбуждения. Постоянный ток питания обмотки возбуждения поступает от системы автоматического регулирования возбуждения.
В качестве базовой схемы САРВ ССГ при выполнении задания необходимо использовать систему автоматического регулирования возбуждения синхронного генератора с отбором тока из вторичной цепи ТФК, какой и является система типа ГСФ–200.
В состав системы входят: силовой трансформатор ТС, блок силовых выпрямителей БСВ, управляемый дроссель ДУ, корректор напряжения КН, выпрямитель питания корректора ВПК, устройство параллельной работы УПР и элементы управления.
Данная система является системой комбинированного регулирования и служит для автоматического поддержания напряжения генератора в заданных пределах и пропорционального распределения реактивных нагрузок между параллельно работающими генераторами.
ВЫБОР СИЛОВЫХ ВЕНТИЛЕЙ
|
| Поделиться: |



