Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Тема 1. 1. Назначение, конструкция и номенклатура кнопок управления, универсальных переключателей, рубильников и пакетных выключателей.Содержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
КОНСПЕКТ ЛЕКЦИЙ по МДК 01.02 «Электрооборудование промышленных и гражданских зданий»
студента(ки) ___ курса группы МЭПЗ - - /
_____________________________________________ (фамилия, имя, отчество)
Преподаватель Воронцов Владимир Иванович
ЛИТЕРАТУРА
Основная 1. В.В.Москаленко. Электрический привод. Москва. Высшая школа.1991. 2. Е.Н.Зимин и др. Электрооборудование промышленных предприятий и установок. 1981. 3. Б.Ю. Липкин. Электрооборудование промышленных предприятий и установок. 1972. 4. Г.М. Кнорринг. Справочник по проектированию электрического освещения. 1976. 5. А.Г. Яуре. Крановый электропривод. 1974. 6. Ю.В. Алексеев и др. Крановое электрооборудование. 1979. Дополнительная 7. В.П.Шеховцов. Электрическое и электромеханическое оборудование. 2004. 8. И.И.Алиев. Справочник по электротехнике и электрооборудованию. 2002. 9. В.И. Дьяков. Типовые расчеты по электрооборудованию. 1991. 10. Б.А.Рапутов. Электрооборудование металлургических кранов. 1981.
МОДУЛЬ 1. ЭЛЕКТРИЧЕСКИЕ АППАРАТЫ, ЭЛЕМЕНТЫ И УСТРОЙСТВА. Тема 1.5. Назначение, конструкция и номенклатура контакторов и магнитных пускателей. Контактор- это электромагнитный аппарат, предназначенный для частых дистанционных коммутаций силовых цепей двигателей. Контакторы бывают: - одно-, двух- и трёхполюсные (количество полюсов равно количеству силовых контактов). - постоянного и переменного тока.
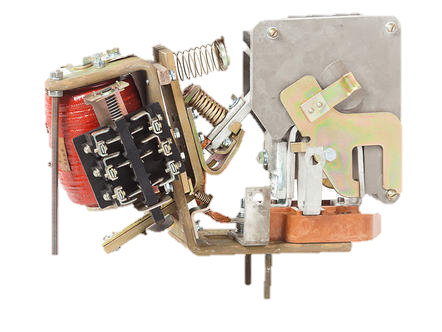
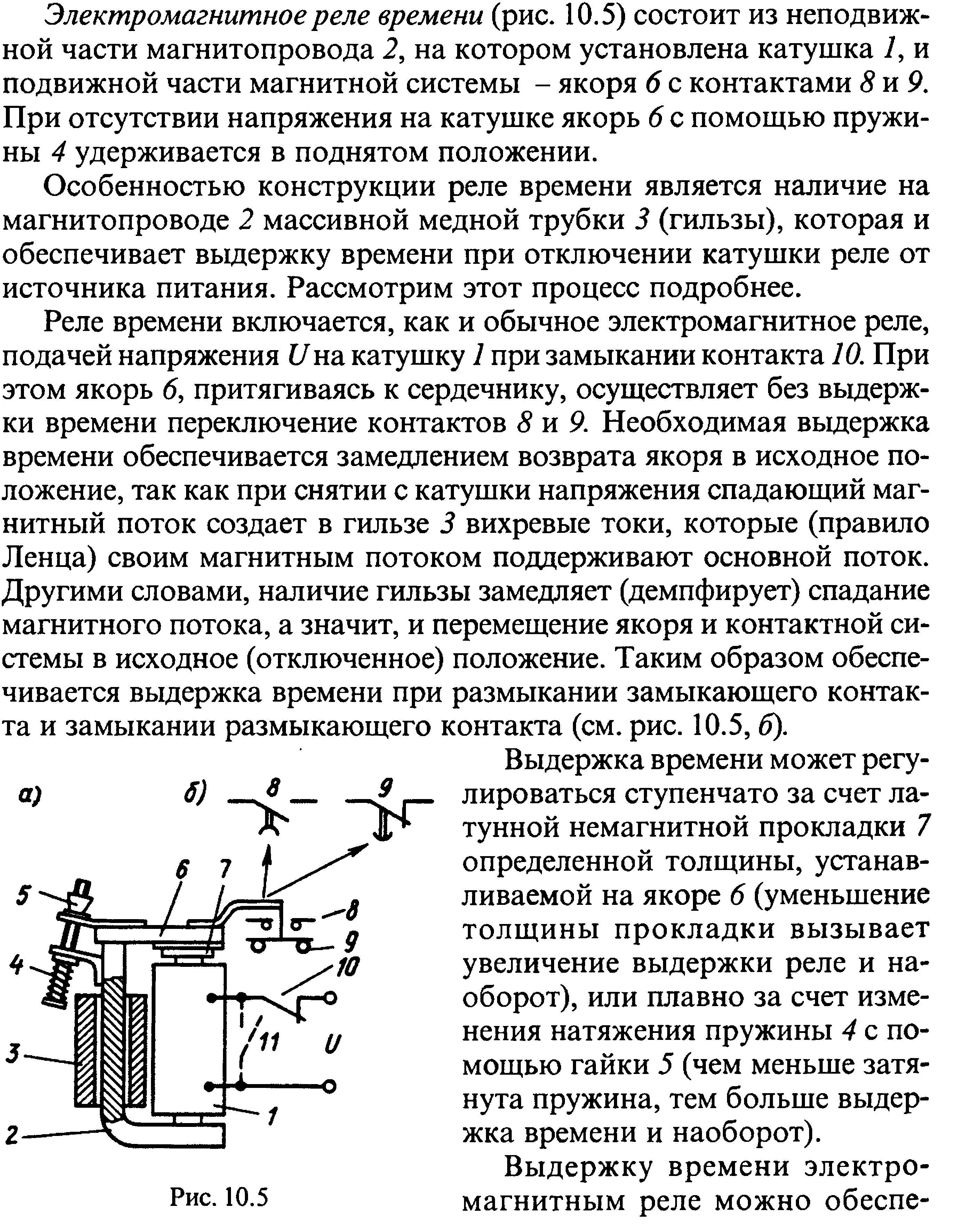
Тема 1.9. Назначение, принцип работы и виды реле времени. Реле времени - электромеханический или полупроводниковый аппарат, предназначенный для коммутации цепей электрооборудования через заданные промежутки времени. По конструкции и принципу работы реле времени бывают электромагнитные, механические, моторные и полупроводниковые. Конструкция и принцип работы электромагнитного реле времени.
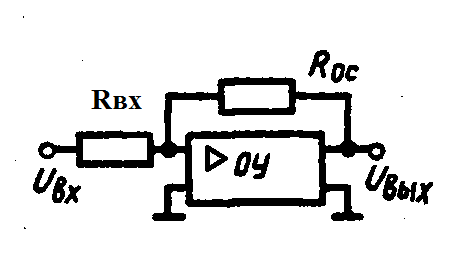
Реле времени на схемах имеют следующие УГО и БЦО: Катушка КТ Контакты КТ КТ Тема 1.10. Датчики угловой скорости. Датчики угловой скорости дают информацию в системы управления электрооборудованием об угловой скорости двигателя ω (рад/с) или о его частоте вращения n (об/мин.). Тема 1.12. Операционный усилитель и регуляторы, построенные на базе Операционного усилителя. Операционный усилитель представляет собой усилитель постоянного тока, обладающий большим коэффициентом усиления - от 5000 до 100000, охваченный отрицательной обратной связью.
Выходное напряжение данного операционного усилителя определяется по формуле:
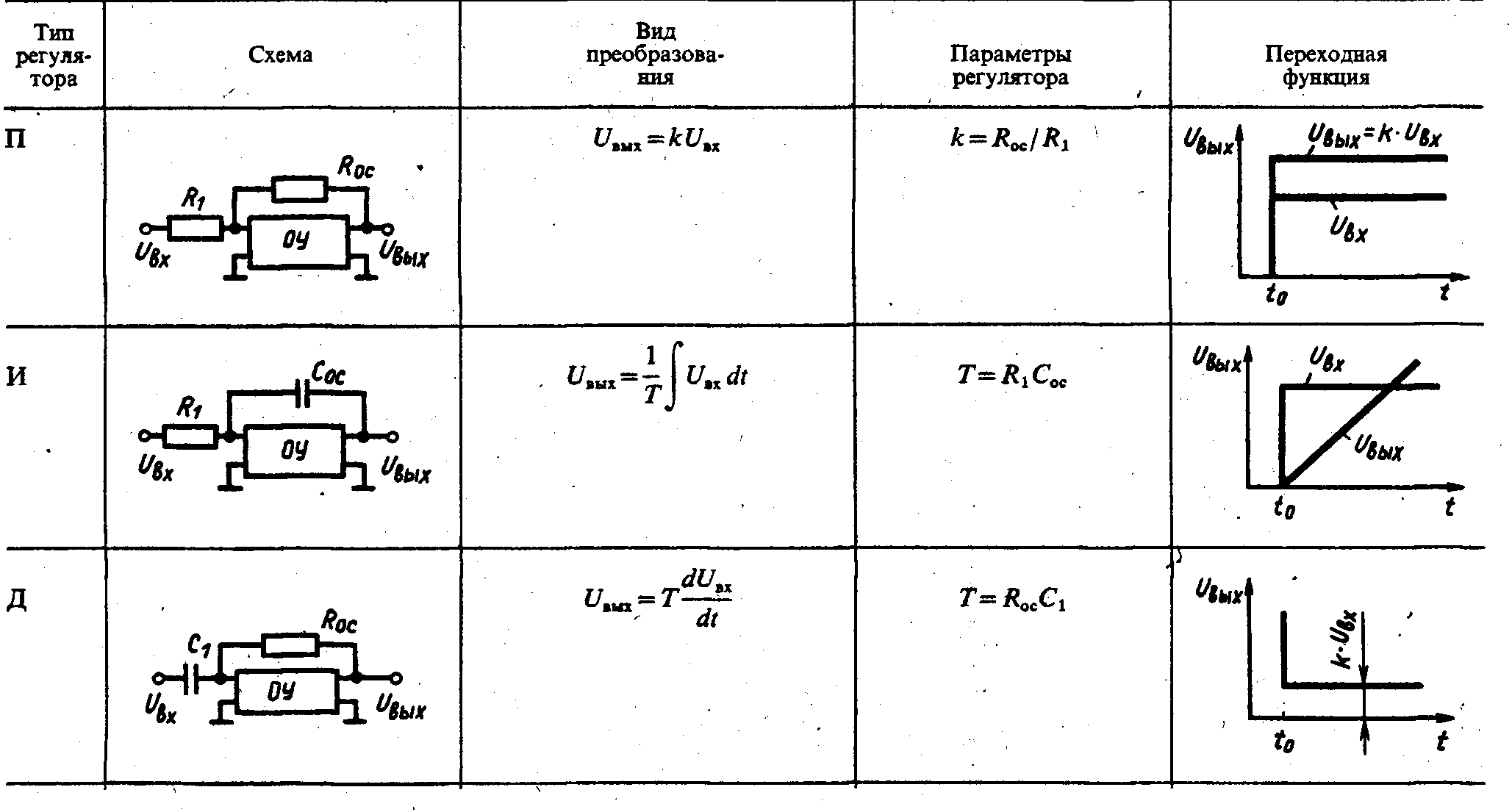
где Uвх – напряжение на входе усилителя; Roc- сопротивление резистора цепи обратной связи; R1 = Rвх.- входное сопротивление усилителя; k = Roc / Rвх – коэффициент усиления усилителя. Из формулы видно, что операционный усилитель не только усиливает входной сигнал, но и изменяет знак входного сигнала на противоположный. Операционный усилитель (микросхема) состоит из транзисторов, диодов и резисторов выполненных в бескорпусном исполнении. Принцип работы операционного усилителя рассматривается в дисциплине «Основы электроники». На базе ОУ создаются так называемые регуляторы – устройства, позволяющие не только усиливать входной сигнал, но и получать различные формы выходного сигнала. Существуют следующие основные типы регуляторов: 1.Пропорциональный (П - регулятор). 2.Интегральный (И – регулятор). 3.Дифференциальный (Д – регулятор). 4. Пропорционально – интегральный (ПИ – регулятор). Схемы, формулы и графики входных и выходных сигналов основных регуляторов приведены в таблице:
1. Пропорциональный П-регулятор. Этот регулятор осуществляет уже рассмотренное выше масштабное (пропорциональное) преобразование входного сигнала с коэффициентом k = Rос / R1> 1(инвертирование знака входного сигнала не является принципиальным признаком преобразования). Выходной сигнал такого регулятора повторяет входной с коэффициентом преобразования k. Отметим, что зависимость Uвых(t) при подаче на вход регулятора ступенчатого входного сигнала получила название его переходной функции. 2. Интегральный И-регулятор. Вторая строка таблицы показывает реализацию этого регулятора, для чего в цепь обратной связи ОУ включается конденсатор Сос, а во входную цепь — резистор R1. В результате этого регулятор приобретает свойства интегрирующего устройства и напряжение на его выходе определяется интегралом от входного сигнала. 3. Дифференциальный Д-регулятор. Реализация этого регулятора показана в третьей строке таблицы.Схема соединения обеспечивает дифференцирование входного сигнала с коэффициентом T=RocC1. Переходная характеристика идеального Д- регулятора представляет собой электрический импульс бесконечно большой амплитуды и малой длительности (для упрощения рисунков здесь и далее график входного сигнала Uвх(t) на них не показан).
СР Тема 1.13. Схемы и принцип работы функциональных преобразователей.
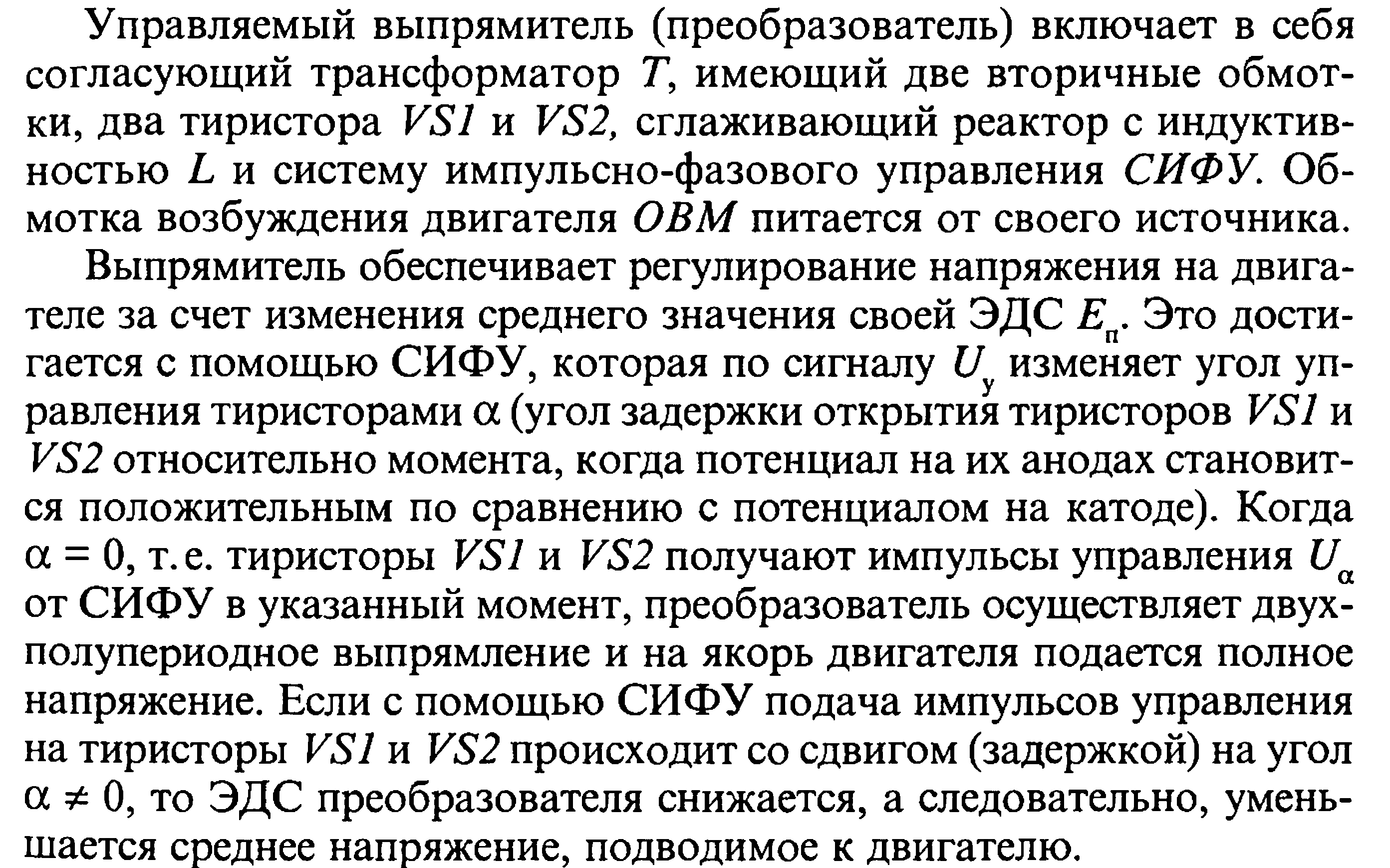
Выпрямителя (ТУВ).
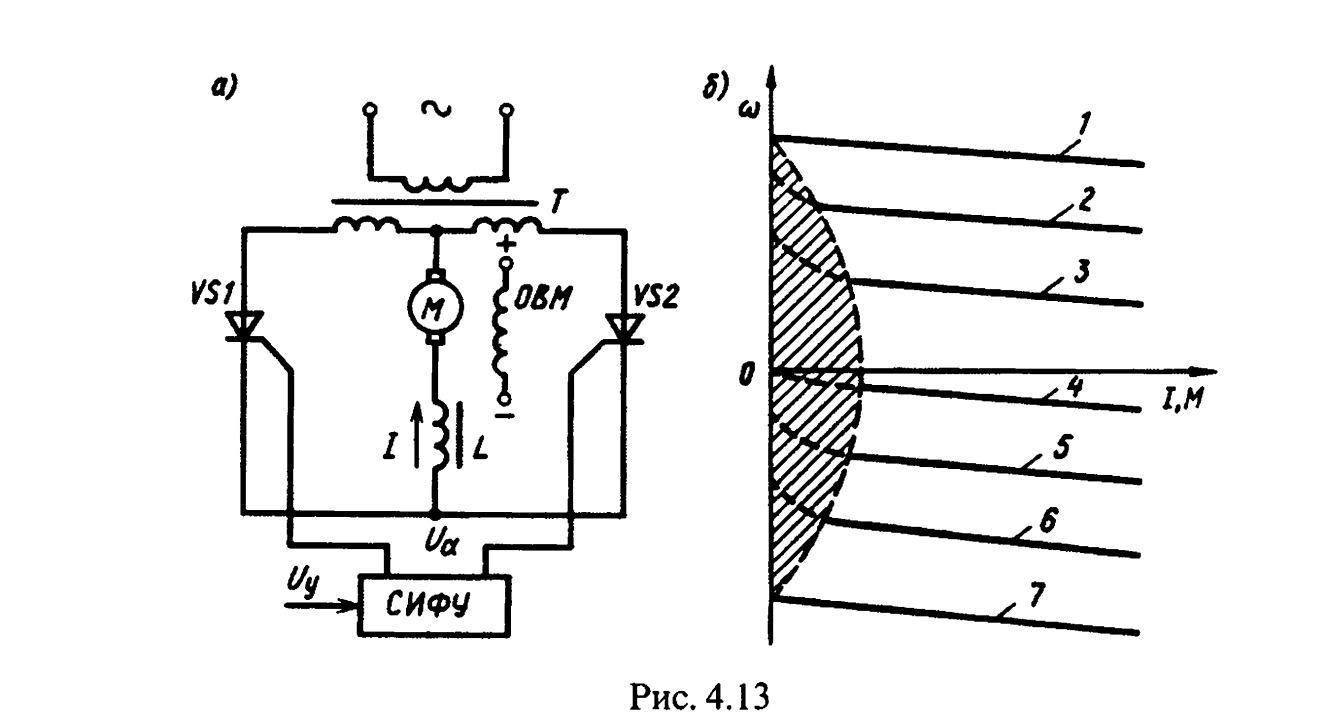
Тиристорные управляемые выпрямители (ТУВ) применяются для плавного регулирования частоты вращения двигателей постоянного тока в широком диапазоне. Рассмотрим принцип действия однофазного двухполупериодного нереверсивного ТУВ, нагрузкой которого является двигатель постоянного тока М (рис.4.13,а).
Таким образом, изменяя значение управляющего напряжения Uу можно в широких пределах регулировать значения угла α (от 00 до 1800), а значит в широких пределах регулировать выходное напряжение ТУВ и частоту вращения двигателя постоянного тока. СР Тема 1.17. Структурная схема и принцип работы тиристорного Лабораторные работы ЗАЧЕТ по модулю 1 КОНСПЕКТ ЛЕКЦИЙ по МДК 01.02 «Электрооборудование промышленных и гражданских зданий»
студента(ки) ___ курса группы МЭПЗ - - /
_____________________________________________ (фамилия, имя, отчество)
Преподаватель Воронцов Владимир Иванович
ЛИТЕРАТУРА
Основная 1. В.В.Москаленко. Электрический привод. Москва. Высшая школа.1991. 2. Е.Н.Зимин и др. Электрооборудование промышленных предприятий и установок. 1981. 3. Б.Ю. Липкин. Электрооборудование промышленных предприятий и установок. 1972. 4. Г.М. Кнорринг. Справочник по проектированию электрического освещения. 1976. 5. А.Г. Яуре. Крановый электропривод. 1974. 6. Ю.В. Алексеев и др. Крановое электрооборудование. 1979. Дополнительная 7. В.П.Шеховцов. Электрическое и электромеханическое оборудование. 2004. 8. И.И.Алиев. Справочник по электротехнике и электрооборудованию. 2002. 9. В.И. Дьяков. Типовые расчеты по электрооборудованию. 1991. 10. Б.А.Рапутов. Электрооборудование металлургических кранов. 1981.
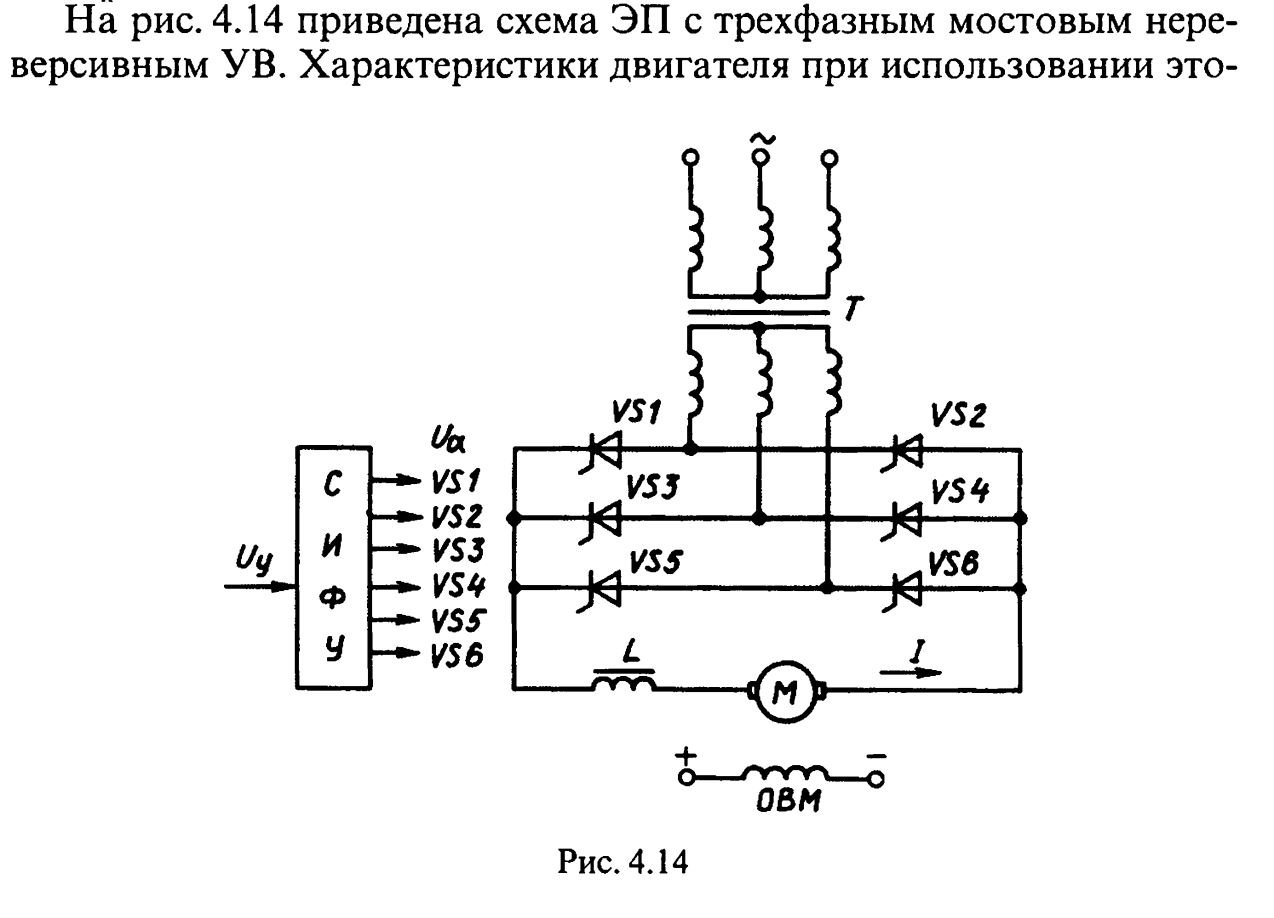
МОДУЛЬ 1. ЭЛЕКТРИЧЕСКИЕ АППАРАТЫ, ЭЛЕМЕНТЫ И УСТРОЙСТВА. Тема 1.1. Назначение, конструкция и номенклатура кнопок управления, универсальных переключателей, рубильников и пакетных выключателей. Кнопки управления предназначены для подачи управляющего воздействия на электрооборудование (например, на электропривод конвейера). Кнопки имеют один, два и более электрических контактов (электрический контакт по другому называется цепью). Одноцепные кнопки выпускаются с замыкающими или с размыкающими контактами. Двухцепные кнопки имеют две пары замыкающих и размыкающих контактов, объединённых единым приводом. Две, три и более кнопок в одном корпусе образуют кнопочную станцию (кнопочный пост).
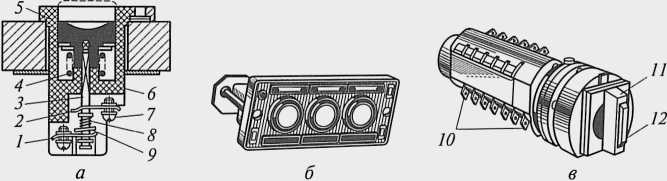
Рис. 1. Кнопка управления (а), кнопочный пост (б): 1,2 — замыкающий и размыкающий контакты; 3 — стержень; 4, 8 — возвратная и контактная пружины; 5 — кнопка; 6 — корпус; 7 — винт; 9 — контактный мостик. На электрических схемах кнопки управления имеют следующие условные графические обозначения (УГО) и буквенно-цифровые обозначения (БЦО):
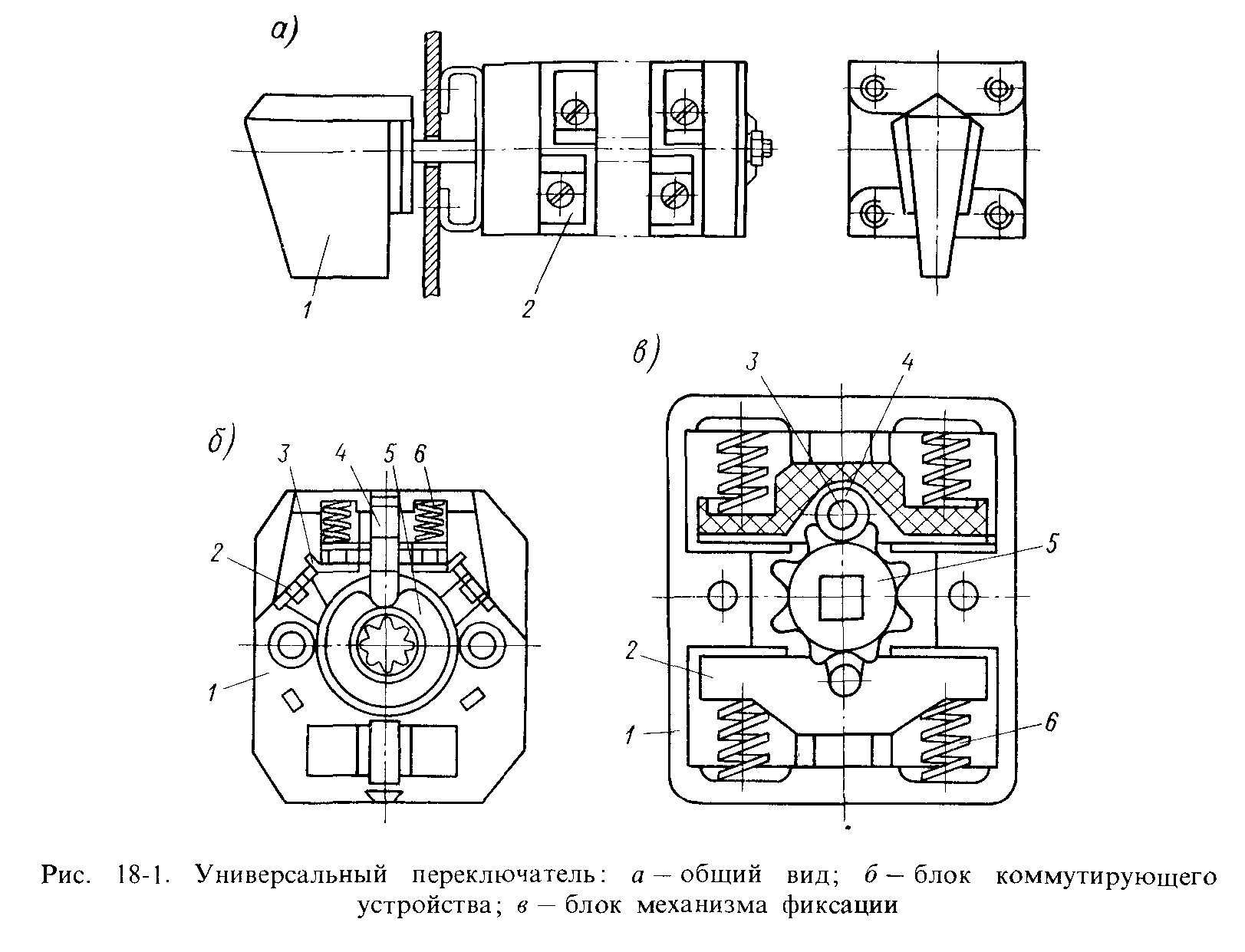
Особенностью кнопок управления является то, что при исчезновении механического воздействия на них (нажатия), их контакты автоматически возвращаются в исходное состояние с помощью возвратной пружины. Наибольшее распространение получили кнопки серий КУ и КЕ, а также кнопочные станции серии ПКЕ. Ключи управления (универсальные переключатели) предназначены для подачи управляющего воздействия на электрооборудование и имеют два, три и более фиксированных положений рукоятки и несколько замыкающих и размыкающих контактов (рис.18.1).
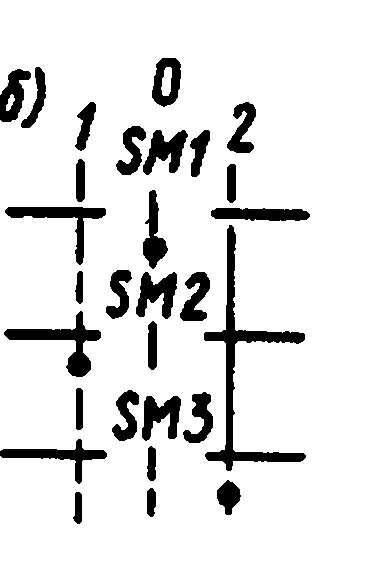
На схемах универсальные переключатели имеют следующие УГО и БЦО:
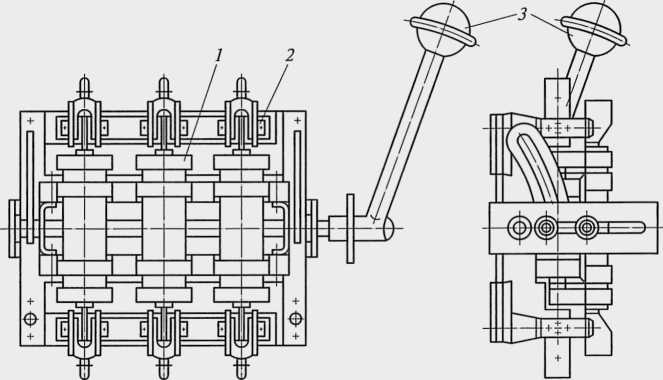
На схеме показан универсальный переключатель, имеющий три положения - 0, 1 и 2 и три контакта (три цепи) - SM 1, SM 2 и SM 3. Жирные точки у контактов означают, в каком из положений эти контакты замкнуты. Самой распространённой серией универсальных переключателей является серия УП, также широко используется серия ПЕ. В силовых цепях ключи управления (универсальные переключатели) обозначаются SM, а в цепях управления, автоматики и сигнализации – SA. Рубильники являются ручными (неавтоматическими) коммутационными аппаратами и предназначены для нечастого замыкания и размыкания силовых цепей постоянного и переменного тока напряжением до 500 В и током до 5000 А. Их изготовляют одно-, двух- и трехполюсными. Рубильники с центральной рукояткой служат только для отключения предварительно обесточенных цепей. Аппараты с боковой рукояткой, боковым и центральным рычажным приводами могут коммутировать электрические цепи под нагрузкой. Выпускаются также рубильники с боковой рукояткой и защитным кожухом. Широкое применение находит совмещенный рубильник-предохранитель (рис. 16.1), размещаемый в закрытом стальном ящике с откидной крышкой. Его достоинствами являются компактность и безопасность обслуживания. При отключенном положения рукоятки 3 предохранители 1 не находятся под напряжением и могут быть сняты. Перевести рукоятку 3 во включенное положение можно лишь при закрытой крышке, а открыть крышку — только при отключенном рубильнике. Провода от сети подсоединяют только к верхним контактным стойкам 2 (губкам) рубильника.
Рис. 16.1. Рубильник-предохранитель (корпус условно снят): 1 — предохранитель; 2 — контактная стойка; 3 — рукоятка
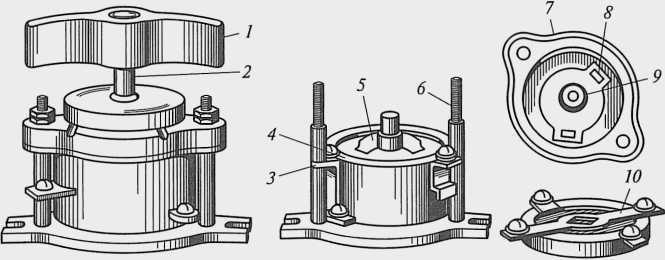
Рис. 14.2. Общий вид пакетного выключателя: 1 — рукоятка; 2 — валик; 3, 5 — неподвижный и подвижный контакты; 4 — кольцо-пакет; 6— стяжная шпилька; 7— крышка; 8 — упор; 9— пружина; 10 —дугогасительная шайба. На схемах рубильники и пакетные выключатели имеют следующие УГО и БЦО:
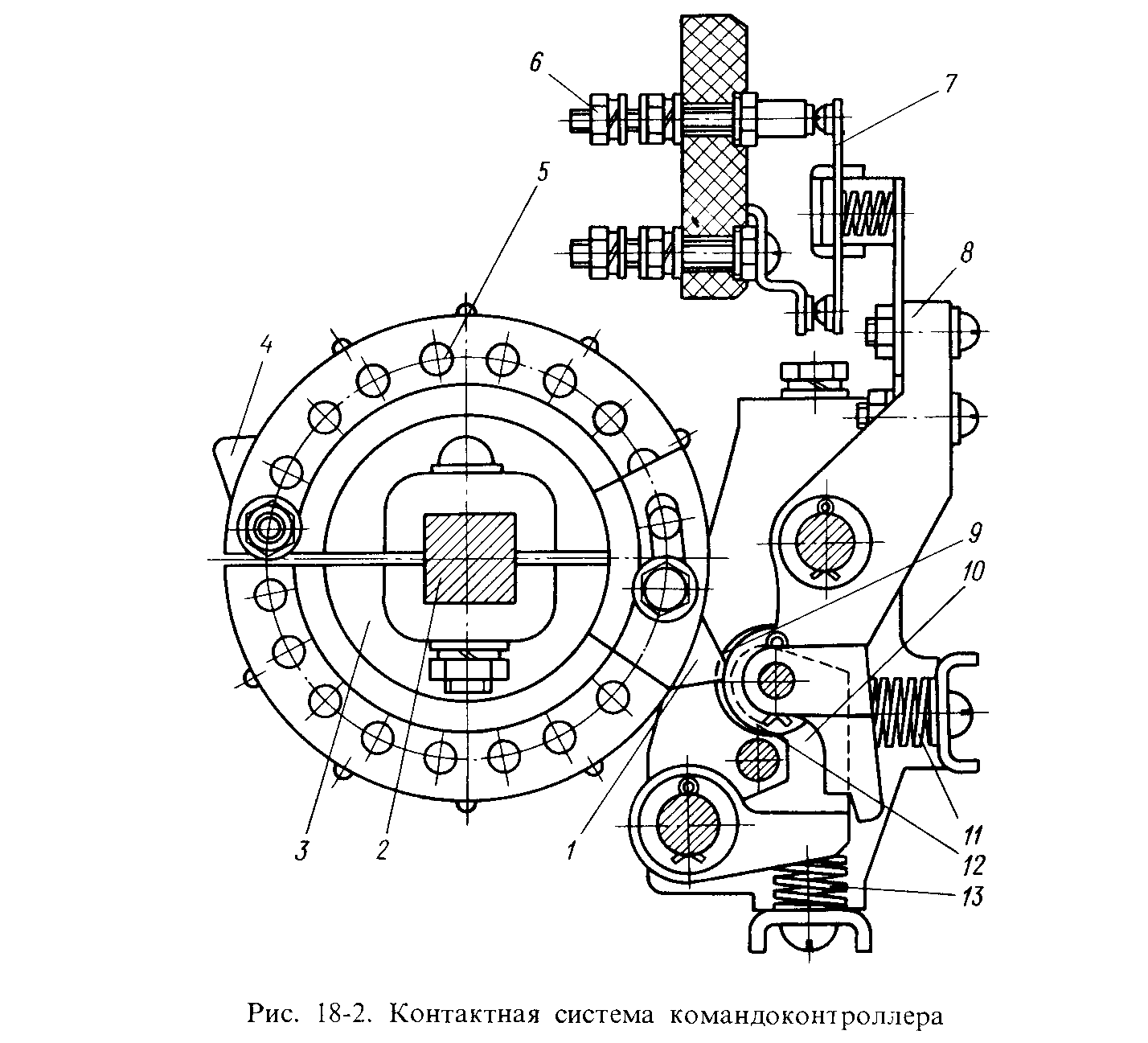
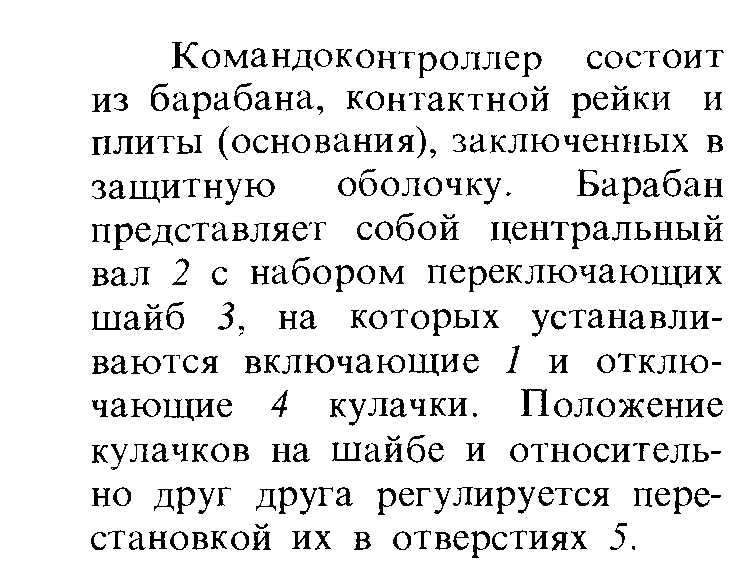
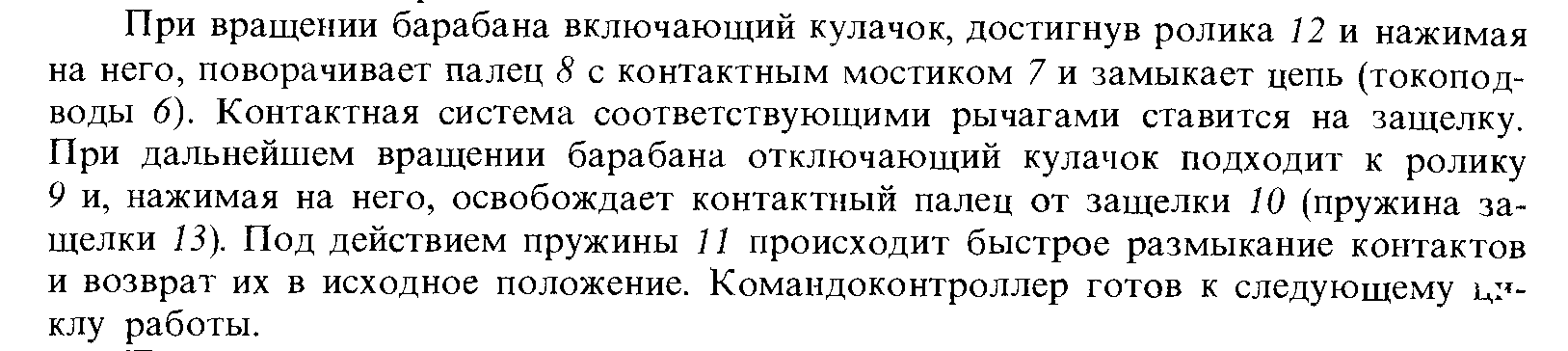
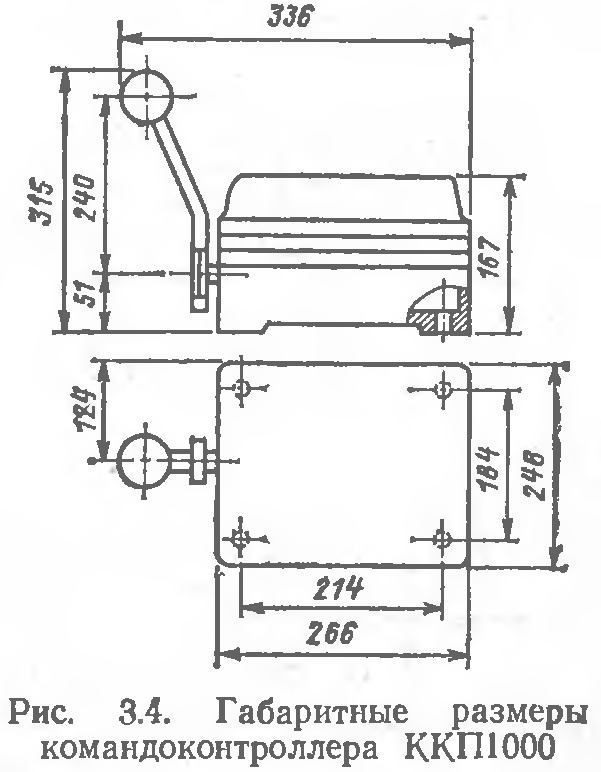
QS 1 СР Тема 1.2. Назначение, конструкция и номенклатура командоконтроллеров. Командоконтроллеры (командоаппараты) – это аппараты управления для коммутации нескольких маломощных (ток нагрузки до 16 А) электрических цепей. Эти аппараты имеют ручное управление от рукоятки или педали с несколькими положениями. Такие аппараты находят широкое применение в схемах управления электроприводами крановых механизмов, металлургического оборудования, электрического транспорта. Командоконтроллеры классифицируются по количеству коммутируемых цепей, виду привода контактной системы, числу рабочих положений рукоятки (педали), диаграммы включения и выключения контактов. Их электрическая схема (условное графическое обозначение) выполняется аналогично схеме ключей управления и переключателей.
Промышленностью выпускаются командоконтроллеры общепромышленного назначения серий КА 410 А, КА 420 А, КА 4000, КА 4100, КА 4200, KA4500, КА 4600, КА 11 для коммутации тока в цепях постоянного тока напряжением до 440 В и переменного тока напряжением до 500 В; командоконтроллеры для управления электроприводами крановых механизмов и металлургического оборудования типов ККП 1000 и ККП 423 для коммутации цепей постоянного и переменного тока.
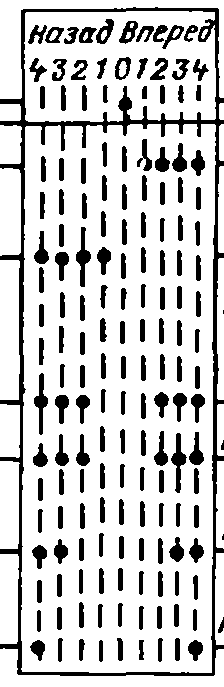
На схемах командоконтроллеры имеют следующие УГО и БЦО (SM): В этом командоконтроллере одно нулевое фиксированное положение и четыре фиксированных положения по обе стороны от нулевого (4-0-4), а также семь контактов (коммутируемых цепей) – SM1, SM2, SM3, SM4, SM5, SM6, SM7.
|
||||||||||||
|
|
Последнее изменение этой страницы: 2021-02-07; просмотров: 622; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.41 (0.007 с.) |