Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Исследование астатических САР с последовательной ⇐ ПредыдущаяСтр 6 из 6
Коррекцией
Цель работы: Исследование и изучение динамических свойств и частотных характеристик астатических систем типа 2-1-2. Определение основных показателей качества САР с помощью программы компьютерного моделирования MATLAB. Программы работы 1. Математическое моделирование
1.1. Теоретическая часть. Ознакомиться с принципом построения структурной схемы САР, определением передаточных функций, логарифмических частотных характеристик и динамических характеристик двухконтурной системы, построенной по симметричному оптимуму.
1.2. Определение параметров структурной схемы двухконтурной САР.
1.3. Создание модели двухконтурной астатической САР.
1.4. Исследование динамических свойств астатической САР с последовательной коррекцией при управляющем и возмущающем воздействиях по методу компьютерного структурного моделирования.
1.5. Аналитический расчёт переходных процессов в двухконтурных САР.
1.6. Частный анализ двухконтурной астатической САР с использованием пакета МАТLAB.
1.7. Построение асимптотических ЛАЧХ и ЛФЧХ исследуемой системы.
2. Расчетная и графическая часть.
2.1. Представить цель и программу работы, содержание расчетно-экспериментальной части и моделирования.
2.2. Составить структурную схему двухконтурной системы, построенной по симметричному оптимуму, определить параметры модели САР.
2.3. Представить модель двухконтурной САР, построенной по симметричному оптимуму, с фильтром на входе системы и без нее.
2.4. Представить результаты исследования по методу структурного моделирования временных характеристик статической САР при задающем и возмущающем воздействиях в виде графиков и таблиц. 2.5. Представить результаты аналитического расчета временных характеристик сравнительно с характеристиками, полученными при моделировании САР.
2.6. По результатам расчетов переходных процессов определить прямые показатели качества САР, свести их в таблицу 6.1.
Таблица 6.1. Показатели качества САР
2.7. Построить частотные характеристики САР с использованием программы MATLAB.
2.8. Построить передаточные функции разомкнутой и замкнутой САР при задающем и возмущающем воздействиях.
2.9. Построить ЛАЧХ и ЛФЧХ двухконтурной САР при задающем и возмущающем воздействиях.
2.10. Сделать выводы по работе.
3. Порядок выполнения лабораторной работы.
3.1. Теоретическая часть. Настройка системы подчинённого регулирования на модульный оптимум позволяет получить оптимальный переходный процесс с минимальным перерегулированием с максимальным быстродействием. Кроме того, указанная настройка обеспечивает астатизм системы по задающему воздействию. Однако, в таком случае возникает статическая ошибка регулирования, зависящая от внешнего возмущающего воздействия. Для исключения этой ошибки необходимо изменить настройку системы. Обеспечить астатизм по возмущающему воздействию можно в двукратно-интегрирующей системе, настроенной по симметричному оптимуму. Передаточная функция регулятора внешнего контура в такой системе описывается выражением:
Внутренний замкнутый контур имеет такую же структуру и передаточную функцию как и в однократно-интегрирующей статической системе, настроенной по модульному оптимуму. Следовательно, внутренний замкнутый контур может быть аппроксимирован апериодическим звеном первого порядка с передаточной функцией:
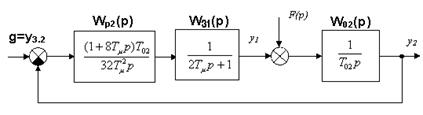
В этом случае структурная схема двухконтурной САР может быть представлена схемой на рисунке 6.1. Передаточная функция разомкнутой двукратно-интегрирующей САР для выходной величины y2 при задающем воздействии имеет вид
Передаточная функция замкнутой САР
В соответствии с симметричной формой ЛАЧХ рассматриваемой системы, такой способ оптимизации получил название симметричного оптимума. При пропорционально-интегральной характеристике регулятора внешнего контура система становится двукратно-интегрирующей, обеспечивающей астатизм и по возмущающему воздействию.
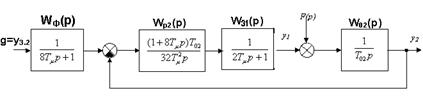
Известно, что при постройке САР по симметричному оптимуму переходный процесс для выходной величины y2 при скачке задающего воздействия g=yз.2. характеризуется значительным перерегулированием, составляющим σ%=43,4% Для улучшения динамических свойств таких систем при приложении задающего воздействия обычно на входе САР устанавливается дополнительный фильтр с передаточной функцией
Структурная схема такой системы с дополнительным фильтром на входе приведена на рисунке 6.2.
Рис. 6.1 Структурная схема системы настроенной по симметричному оптимуму без фильтра
Рис. 6.2 Структурная схема системы настроенной по симметричному оптимуму с фильтром
Имеется другой вариант выбора регулятора внешнего контура, когда в системе обеспечивается минимальный показатель колебательности. В этом случае передаточная функция регулятора имеет вид
3.2. Создание модели двухконтурной астатической САР с последовательной коррекцией.
Создаются модели двухконтурной астатической САР, структурные схемы которой представлены на рис. 6.1 и 6.2. Для этого предварительно необходимо ознакомиться с общими сведениями по работе с пакетом MATLAB-Simulink и с порядком создания моделей в среде Simulink. Параметры моделей звеньев САР устанавливаются в соответствии с параметрами структурной схемы, заданными преподавателем (см. Л.р. №4,5), либо заданным в задании на курсовую работу по ТАУ. Представленная модель (рис.6.3) позволяет исследовать два варианта двухконтурной САР: а) при отсутствии фильтра на входе САР; б) при наличии фильтра на входе САР.
3.3. Расчёт переходных процессов САР по методу структурного моделирования
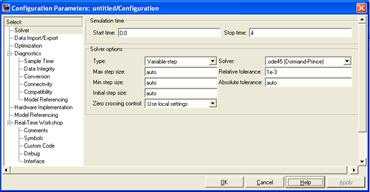
Расчёт переходных процессов в САР при оптимальной настройке регулятора производится при задающем g=1, воздействях для выходных величин: 1) y1 и y2 для системы без фильтра; 2) y1ф и y2ф для системы с фильтром на входе САР. В связи с тем, что фильтр не оказывает влияние на реакцию системы при возмущающем воздействии, поэтому в данном случае переходный процесс рассматривается для выходных величин y1в и y2в. Схема модели САР в этом случае будет иметь вид, представленный на рис. 6.3 Перед выполнением расчетов необходимо предварительно задать параметры расчета. Задание параметров расчета выполняется в панели управления меню Simulation/ Configuration Parameters. Для получения переходных процессов при управляющем воздействии необходимо установить конечное время равное 50Tμ (в данном примере 4 секунды) Остальные параметры установить согласно рис. 6.4.
Рис 6.4 Параметры расчёта
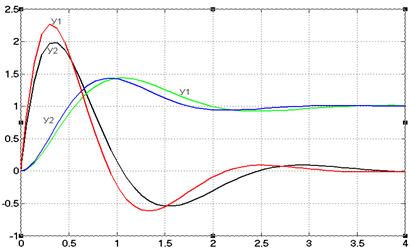
Для формирования возмущающего воздействия используем блок Signal Builder. Время наброса нагрузки 50Tμ (в данном примере 50Tμ=4 с), конечное время 90Tμ (в данном примере 90Tμ=7,2 с), амплитуда возмущающего сигнала равна единице. С учётом всех этих параметров блок Signal Builder будет выглядеть так, как показано на рисунке 6.5. Дважды щёлкнув по осциллографу (Scope) получаем следующие переходные функции по управляющему воздействию (Tк = 50Tμ) рис. 6.6.
Чтобы получить переходную функцию при возмущающем воздействии необходимо в меню Simulation/ Configuration Parameters конечное время установить равное Tk = 90Tμ. Получаем переходные функции, представленные на рис. 6.7. Необходимо исследовать и другой вариант настройки регулятора, обеспечивающей минимальный показатель колебательности. В этом случае передаточная функция регулятора внешнего контура имеет вид Для исследования системы с «минимальным показателем колебательности» необходимо немного изменить вышеприведённую структурную схему. После корректировки она будет иметь вид, представленный на рис 6.8. Дальнейший порядок действий такой же как и в предыдущем случае. Сначала необходимо снять переходные процессы при управляющем воздействии (Tк = 50Tμ), а затем при возмущающем воздействии (Tk = 90Tμ). Получим переходные процессы, представленные на рисунках 6.9 и 6.10.
Рис. 6.5 Параметры блока Signal Builder
3.4. Аналитический расчет переходных процессов
Выражения для переходных функций могут быть получены [6] с помощью обратного преобразования Лапласа. Переходная функция по управляющему воздействию системы, когда выходной величиной является выход внешнего контура, без фильтра имеет вид:
и с фильтром:
Переходная функция по управляющему воздействию, когда выходной величиной является выход внутреннего контура, имеет вид:
с фильтром:
Рис. 6.6 Переходные функции при управляющем воздействии
Результаты аналитических расчетов переходных процессов при
Таблица 6.1 Расчетные данные переходных процессов по управляющему воздействию
Рис. 6.7. Переходные функции при возмущающем воздействии
Рис. 6.9. Переходные функции при управляющем воздействии с «меньшим показателем колебательности»
Рис. 6.10. Переходные функции при возмущающем воздействии с «меньшим показателем колебательности»
Рис. 6.11. Переходные процессы при управляющем воздействии
Передаточная функция по возмущению будет одинаковой как для системы с фильтром, так и для системы без фильтра, т.к. фильтр не влияет на систему при возмущающем воздействии. Это справедливо как для внешнего, так и для внутреннего контуров. Переходная функция по возмущающему воздействию, когда выходной величиной является выход внешнего контура, имеет вид:
Переходная функция по возмущающему воздействию, когда выходной величиной является выход внешнего контура, имеет вид:
Расчеты переходных процессов по возмущающему воздействию представлены в таблице 6.2.
Таблица 6.2 Расчеты переходных процессов по возмущающему воздействию
Рис. 6.12 Переходные процессы при возмущающем воздействии 3.5. Частотный анализ двухконтурной астатической САР с использованием пакета MATLAB.
3.5.1. Построение ЛАЧХ и ЛФЧХ разомкнутых систем САР по управляющему воздействию Логарифмические частотные характеристики (диаграммы Боде) могут быть получены с использованием пакета MATLAB. В соответствии с этими методами предварительно составляется передаточная функция разомкнутой САР для выходной величины y1 и y2 при задающем и возмущающем воздействиях. Для этого используются структурные схемы САР, представленные на рис. 6.1 и 6.3. Логарифмические частотные характеристики САР при управляющем воздействии имеют следующий вид. Рассматривается пример САР со следующими исходными данными: Tμ=0.08c, T01=0.16c, T02=0.88c, Kф=9, K0=4. Для выходной величины внешнего контура y2: - для схемы без фильтра
- для схемы с фильтром
Для выходной величины y1 внутреннего контура: - для схемы без фильтра
- для схемы с фильтром
Расчёт логарифмических частотных характеристик с использованием пакета MATLAB производится в следующем порядке. Для выходной величины внешнего контура создадим LTI- объект: >> w1=tf([0.64 1],[0.0327 0.2048 0 0]) (без фильтра) Transfer function: 0.64 s + 1 ----------------------- 0.0327 s^3 + 0.2048 s^2
>> w2=tf([1],[0.0327 0.2048 0.64 1]) (с фильтром) Transfer function: 1 ------------------------------------ 0.0327 s^3 + 0.2048 s^2 + 0.64 s + 1 >>bode(w1,w2)
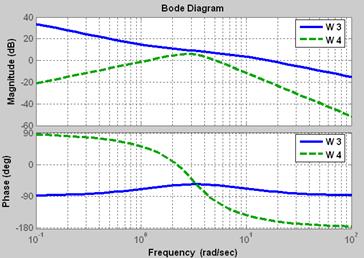
Для выходной величины внутреннего контура создадим LTI-объект >> w3=tf([0.5632 1],[0.0327 0.2048 0 ]) (без фильтра) Transfer function: 0.5632 s + 1 --------------------- 0.0327 s^2 + 0.2048 s >> w4=tf([0.88 0],[0.0327 0.2048 0.64 1 ]) (с фильтром) Transfer function: 0.88 s ------------------------------------ 0.0327 s^3 + 0.2048 s^2 + 0.64 s + 1 >> bode(w3,w4)
Рис. 6.13 ЛАЧХ и ЛФЧХ разомкнутых систем САР по управляющему воздействию для внешнего контура
Для выходной величины внутреннего контура
Для системы с минимальными показателями колебательности
Расчёт ЛАЧХ и ЛФЧХ производится в следующем порядке. Для выходной величины внешнего контура создадим LTI- объект >> w2=tf([1],[0.0327 0.2048 0.64 1]) (с фильтром) Transfer function: 1 ------------------------------------ 0.0327 s^3 + 0.2048 s^2 + 0.64 s + 1 >> w5=tf([1],[0.88 0]) (без фильтра) Transfer function: 1 ------ 0.88 s >> bode(w2,w5)
Рис. 6.14 ЛАЧХ и ЛФЧХ разомкнутых систем САР по управляющему воздействию для внутреннего контура
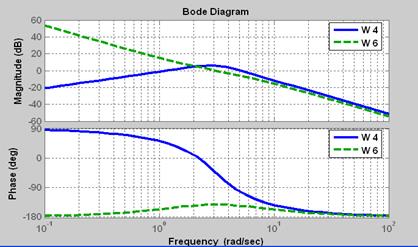
Для выходной величины внутреннего контура создадим LTI- объект >> w4=tf([0.88 0],[0.0327 0.2048 0.64 1 ]) (с фильтром) Transfer function: 0.88 s ------------------------------------ 0.0327 s^3 + 0.2048 s^2 + 0.64 s + 1
Рис. 6.15 ЛАЧХ и ЛФЧХ разомкнутой САР по возмущающему воздействию для внешнего контура >> w6=tf([0.64 1],[0.0327 0.2048 0 0]) (без фильтра) Transfer function: 0.64 s + 1 ----------------------- 0.0327 s^3 + 0.2048 s^2
Рис. 6.16 ЛАЧХ и ЛФЧХ разомкнутой САР по возмущающему воздействию для внутреннего контура
Для системы с минимальным показателем колебательности создадим LTI – объект >> w7=tf([0.64 1],[0.0262 0.1638 0 0]) Transfer function: 0.64 s + 1 ----------------------- 0.0262 s^3 + 0.1638 s^2 >>
3.6. Построить асимптотические ЛАЧХ и ЛФЧХ двухконтурной астатической САР, настроенной по симметричному оптимуму. Определить частотные показатели качества системы регулирования.
3.7. Определить прямые и косвенные показатели качества САР при управляющем воздействиях, при наличии и отсутствии фильтра на входе САР, при обеспечении минимального показателя колебательности.
Полученные показатели качества представить в виде таблицы 6.3 Пакет MATLAB позволяет по ЛАЧХ определить запас по фазе и запас по амплитуде, на рис. 6.18 показан пример определения запаса по фазе. Это осуществляется следующим образом после построения ЛАЧХ: - по белому полю нажать правую кнопку мыши и выбрать Charactristics \ all stability margins поставить галочки на против каждой строчки и получим запас по амплитуде и фазе.
Рис. 6.17 ЛАЧХ и ЛФЧХ разомкнутой САР с минимальным показателем колебательности
Таблица 6.3. Показатели качества асимптотической САР
Рис. 6.18 Определение запаса по фазе
Выявить связь между прямыми показателями качества и частотными характеристиками. Сделать выводы по работе.
КОНТРОЛЬНЫЕ ВОПРОСЫ
1. Что понимают под оптимальной ситстемой автоматического регулирования? 2. В чем заключается сущность технического или модульного оптимума систем регулирования? 3. От чего зависит тип регулятора? 4. Какой вид имеют частотные характеристики системы, настроенной по модульному оптимуму? 5. Как влияет порядок системы регулирования на переходного процесса? 6. Каким образом с помощью регулятора, компенсируются большие постоянные времени объекта регулирования? 7. Объяснить влияние параметров регулятора внутреннего контура на показатели переходного процесса. 8. Каким образом строятся ЛАЧХ и ЛФЧХ оптимальной системы? 9. Объяснить по частотным характеристикам понятия запаса устойчивости по амплитуде и фазе. 10. Как определить прямые и косвенные показатели качества САР? 11. Какая связь существует между прямыми и косвенными показателями качества? 12. Представьте логарифмические частотные характеристики двухконтурной статической САР. 13. Представить примерный вид переходных функций статических САР при управляющем воздействии и объяснить их. 14. Представить примерный вид переходных функций статических САР при возмущающем воздействии и объяснить их. 15. Что такое статическая ошибка САР и от чего она зависят? 16. На примере двухконтурной САР объяснить, в чём заключается достоинства и недостатки настройки на модульный оптимум? 17. В чём заключается оптимизация САР по «симметричному оптимуму»? 18. Чем обеспечивается астатизм САР по возмущающему воздействию при настройке по «симметричному оптимуму»? 19. Объяснить характер переходных процессов двухконтурной астатической САР: 1. при задающем воздействии; 2. при возмущающем воздействии. 20. Объяснить достоинства и недостатки систем, настроенных по «симметричному оптимуму». 21. Представить передаточные функции статических и астатических САР при управляющем и возмущающем воздействиях. 22. Для чего применяется аппроксимация внутреннего замкнутого контура САР?
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Теория автоматического управления. ч.1 Теория линейных систем автоматического управления. Под. Ред. А.А. Воронова. М.: Высшая школа, 1986г – 367с. 2. Оглоблин А.Я. Линейные динамические звенья и системы автоматического регулирования. Методические указания к лабораторному практикуму – Магнитогорск, МГТУ, 2000г. 3. Дорф Р., Бишоп Р. Современные системы управления (перев. с англ. Копылова Б.И.), М.:Лаборатория базовых знаний/Юнимедиастайл 2002г-832с. 4. Дебни Дж.Б.,Харман Т.Л. Simulink 4: Секреты мастерства (перев. с англ. Симонова М.Л.) М.:Бином/Лаборатория знаний, 2003г-403с. 5. Дьяконов В. Simulink 4. Специальный справочник – СПб, Питер, 2002г – 528с. 6. Лукин А.Н. Теория автоматического управления. Методические указания к курсовой работе для студентов специальности 180400 – Магнитогорск, МГТУ, 2004г, 67с. 7. Герман-Галкин С.Г. Компьютерное моделирование полупроводниковых систем в МATLAB 6.0 Учебное пособие – СПб, корона, 2001, 320с. 8. Лукин А.Н. Теория автоматического управления. Учебное пособие, ГОУ ВПО “МГТУ им. Носова”, 2005. 215 с.
СОДЕРЖАНИЕ
Введение. 3 1. Основные сведения работы с пакетом MATLAB - Simulink. …5 1.1. Запуск Simulink. 5 1.2. Создание модели. 7 1.3. Окно модели. 11 1.4. Основные приемы подготовки и редактирования модели. 12 1.5. Установка параметров расчета и его выполнениеВведение. 17 1.6. Subsystem – подсистемы. 26 1.7. Использование Simulink LTI-Viewer для анализа динамических систем. 28 1.8. Исследование САУ с использованием пакета MATLAB. 36 2. Исследование динамических звеньев САР с использованием MATLAB -Simulink. 42 2.1. Лабораторная работа № 1. 42 2.2. Лабораторная работа № 2. 53 2.3. Лабораторная работа № 3. 80 3. Исследование систем подчиненного регулирования с последователь- ной коррекцией 102 3.1. Принципы построения и работы систем подчиненного регулирования с последовательной коррекцией. 103 3.2. Лабораторная работа № 4. 107 3.3. Лабораторная работа № 5. 125 3.4. Лабораторная работа № 6. 139 Контрольные вопросы.. 158 Библиографический список. 159
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2021-03-09; просмотров: 186; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.218.196.182 (0.209 с.) |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 %
%







 (6.1)
(6.1) (6.2)
(6.2) (6.3)
(6.3) (6.4)
(6.4) .
.
 .
.
 (6.5)
(6.5)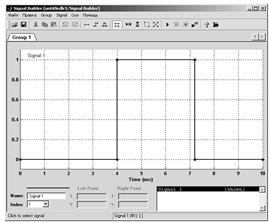
 (6.6)
(6.6) (6.7)
(6.7)
 ; (6.8)
; (6.8)
 . (6.9)
. (6.9)
 с. представлены в таблице 6.1
с. представлены в таблице 6.1



 (6.10)
(6.10) (6.11)
(6.11)
 (6.12)
(6.12) (6.13)
(6.13) (6.14)
(6.14) (6.15)
(6.15)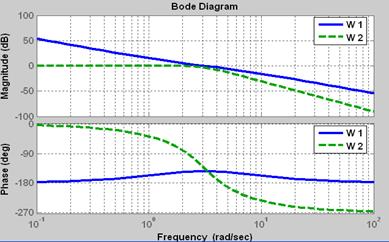
 (6.16)
(6.16) (6.17)
(6.17)