Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Исследование систем подчиненного регулирования с последовательной коррекцией
Целью данного раздела лабораторного практикума является усвоение методов расчёта и исследования динамических систем автоматического регулирования с последовательной коррекцией. В качестве основного метода исследования использован метод компьютерного моделирования с использованием пакета MATLAB-Simulink. В данном разделе даны краткие теоретические сведения по построению, расчёту и исследованию систем подчинённого регулирования с последовательной коррекцией. В качестве объекта исследования рассматриваются одноконтурная и двухконтурные статическая и астатическая САР с последовательной коррекцией, представленные в трех лабораторных работах. Выполнение лабораторного практикума по ТАУ совмещено с выполнением курсовой работы по курсу [6].Это позволяет более широко рассмотреть вопросы исследования одноконтурных и двухконтурных систем в лабораторном практикуме, а также выполнить экспериментальную часть курсовой работы посредством компьютерного моделирования. С этой целью параметры объекта исследования даются в задании на курсовую работу. Но в тоже время эти параметры могут быть заданы произвольно преподавателем. При исследовании систем регулирования производится расчёт прямых и косвенных показателей качества. Для их получения используются временные характеристики систем, полученные методом структурного компьютерного моделирования, и аналитический расчёт переходных процессов. Косвенные показатели качества представляются по частотным характеристикам систем. Основным методом получения временных и частотных характеристик являются методы, основанные на использовании MATLAB-Simulink. Даны основные положения по работе с указанным пакетом. 3.1 ПРИНЦИПЫ ПОСТРОЕНИЯ И РАБОТЫ СИСТЕМ ПОДЧИНЕННОГО РЕГУЛИРОВАНИЯ С ПОСЛЕДОВАТЕЛЬНОЙ КОРРЕКЦИЕЙ
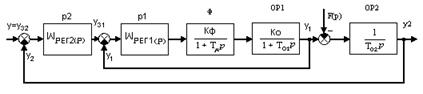
В настоящее время к автоматическим системам управления, например, в автоматизированном электроприводе, предъявляются требования высокой точности регулирования и высокого быстродействия. Поэтому преимущественное применение нашёл принцип последовательной коррекции или так называемый принцип подчинённого регулирования координат. Сущность его заключается в следующем. Объект регулирования представляется в виде последовательно соединённых звеньев, выходными параметрами которых являются регулируемые координаты. Для управления каждой из этих координат применяется отдельный регулятор, образующий с объектом контур, замкнутый соответствующей обратной связью. Регуляторы соединяются последовательно так, что выход одного является входом другого, т.е. каждый внутренний контур регулирования подчинён внешнему. В качестве примера на рис.4.1 представлена двухконтурная схема подчинённого регулирования, включающая объект регулирования с тремя постоянными времени
Рис.4.1 Двухконтурная система подчинённого регулирования с последовательной коррекцией Звено с этой постоянной времени Регулятор каждого контура регулирует одну выходную координату контура и компенсирует одну или две большие постоянные времени объекта регулирования. На вход каждого регулятора подаются два сигнала: сигнал, пропорциональный заданному и действительному значению регулируемой величины. Передаточные функции регуляторов выбираются таким образом, чтобы обеспечить оптимальность контура регулирования. Такую коррекцию называют последовательной. При включении регулятора последовательно со звеном с большой постоянной времени, последняя компенсируется и вводится взамен её существенно меньшая постоянная времени Следовательно, передаточная функция разомкнутого контура приобретает вид [6]
Для замкнутого контура
где Таким образом, внутренний замкнутый контур будет представлять из себя колебательное звено. Собственная частота контура будет равна
Коэффициент демпфирования
Следовательно, характер переходного процесса определяется соотношением постоянных времени
Если принять
что обеспечивает оптимальный переходный процесс системы второго порядка с перерегулированием Передаточные функции внутреннего контура, оптимизированного по модульному оптимуму, будут иметь вид:
или
где
Передаточная функция регуляторов в системе, настроенной по модульному оптимуму, может быть получена по обобщённой формуле
где i – номер рассматриваемого контура;
W 0 i (p) – передаточная функция той части объекта регулирования, которая должна быть скомпенсирована регулятором; Ki, Ki -1 – коэффициенты обратной связи рассматриваемого и предыдущего внутреннего контура соответственно. Следовательно, передаточная функция регулятора подбирается таким образом, чтобы при его включении последовательно с соответствующим звеном объекта регулирования была скомпенсирована большая постоянная времени Т0 и взамен её действовала существенно меньшая постоянная времени Tu=a∙Tμ В зависимости от передаточной функции W 0 i (p) объекта в системах подчинённого регулирования могут быть использованы регуляторы четырёх типов: · П – регулятор при
· И – регулятор при
· ПИ – регулятор при
· ПИД – регулятор при
Статические и динамические показатели систем подчинённого регулирования зависят от настройки регуляторов: передаточных коэффициентов, постоянных времени обратной связи и постоянных времени интегрирования регуляторов, соотношения постоянных времени контуров регулирования. Поэтому при исследовании этих САР необходимо осуществить настройку вышеуказанных параметров регуляторов. Одной из наиболее распространённых систем подчинённого регулирования является двухконтурная система подчиненного регулирования с последовательной коррекцией (рис.4.1). Поэтому важным является рассмотреть вопросы построения, расчёта и исследования статических и динамических характеристик этой системы при её настройке на модульный и симметричный оптимумы. Причём, рассмотрение этих вопросов целесообразно разделить на три этапа: 1. Исследование одноконтурных САР с последовательной коррекцией. На данном этапе следует рассмотреть вопросы расчёта, исследования и настройки внутреннего контура двухконтурных систем подчинённого регулирования, построенных как по модульному, так и симметричному оптимуму. 2. Исследование двухконтурных однократно-интегрирующих статических САР с последовательной коррекцией. На данном этапе производится расчёт, исследование двухконтурных САР, построенных по модульному оптимуму, анализ статики и динамики таких систем, как при управляющих, так и при возмущающих воздействиях.
3. Исследование двухконтурных двукратно-интегрирующих астатических САР с последовательной коррекцией, построенных по симметричному оптимуму. Исследуются статические и динамические характеристики таких САР. Исследование вышеперечисленных систем осуществлено в виде трех лабораторных работ, описание которых представлено ниже.
ЛАБОРАТОРНАЯ РАБОТА № 4
Исследование одноконтурной САР с последовательной коррекцией
Цель работы: Изучение динамических свойств и показателей качества САР методом структурного моделирования и частотного анализа систем с использованием пакета MATLAB – Simulink. Оценка влияния параметров САР на её динамические свойства. Выбор оптимальной настройки регуляторов в системе с последовательной коррекцией.
1. Математическое моделирование. Расчетно-экспериментальная часть. 1.1. Теоретическая часть. Ознакомление с пакетами MATLAB-Simulink, пакетом расширения Power System Blockset, Signal Processing Toolbox и др., а также способами построения моделей. 1.2. Составление структурной схемы и определение параметров модели одноконтурной оптимальной САР. 1.3. Создание моделей одноконтурной САР: - модель оптимально построенной одноконтурной замкнутой системы и разомкнутой САР без регулятора; - модель одноконтурной САР при изменении параметров регулятора Тр и Тр1. 1.4. Исследование динамических свойств(переходных процессов) одноконтурных САР по методу компьютерного моделирования: - при оптимальной настройке регулятора; - при изменении постоянной времени интегрирования регулятора Тр; - при изменении постоянной времени обратной связи регулятора Тр1. 1.5. Исследование частотных характеристик одноконтурной САР на MATLAB.
2. Расчетная и графическая части. Содержание отчета 2.1. Представить цель и программу работы, содержание расчетно-экспериментальной части. 2.2. Составить структурную схему и определить параметры модели одноконтурной оптимальной САР. 2.3. Создать и исследовать модели одноконтурной САР с регулятором и без него. 2.4. Представить результаты исследования динамических свойств (переходных процессов) одноконтурных САР при оптимальной настройке и изменении параметров регулятора Тр и Тр1. Результаты представить в виде графиков и таблиц. 2.5. Определить прямые показатели качества САР, результаты представить в виде следующей таблицы
Таблица 4.1 Показатели качества одноконтурной САР
где -относительное время регулирования (вхождение координаты в 2% область установившегося значения);
2.6. Составить передаточные функции разомкнутых и замкнутых одноконтурных САР для всех вариантов изменения параметров регулятора. 2.7. Рассчитать и построить серии асимптотических логарифмических амплитудных L(w) и фазовых 2.8. Привести результаты исследования частотных характеристик одноконтурной САР на MATLAB. Определить параметры динамических звеньев (т.к) по полученным частотным характеристикам. 2.9. Определить и оценить косвенные показатели качества одноконтурной САР по частотным характеристикам (частота среза, запас по фазе и амплитуде и др.) 2.10. Выявить связь между показателями качества, параметрами системы и частотными характеристиками. 2.11. Сделать выводы по работе.
3. Порядок выполнения лабораторной работы
3.1. Составление структурной схемы и определение параметров модели одноконтурной оптимальной САР. Одноконтурная САР с последовательной коррекцией является внутренним контуром двухконтурной системы подчинённого регулирования с последовательной коррекцией, представленной на рис. 4.1. Разомкнутая часть представляет собой последовательное соединение регулятора с фильтром (постоянная времени Передаточная функция регулятора внутреннего контура САР или одноконтурной системы, настроенной по модульному оптимуму, может быть получена по обобщённой формуле (3.8)
где Tp1=T01 – постоянная времени обратной связи регулятора;
Структурная схема одноконтурной САР представлена на рис.4.2.
Рис. 4.2 Структурная схема одноконтурной САР
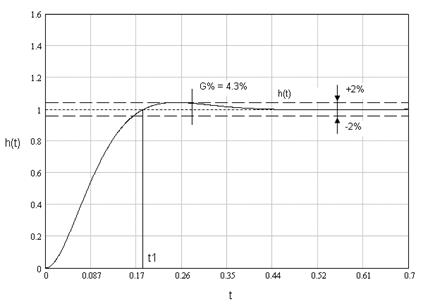
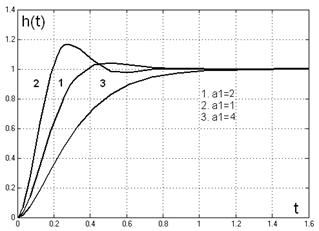
При оптимальной настройке регулятора (4.13) САР будет иметь оптимальные показатели переходного процесса (рис. 4.3). В то же время, известно, что эти показатели существенно зависят от параметров САР и от настройки регулятора. Поэтому в лабораторной работе исследуется влияние настройки регулятора на динамику САР. Исследуется два случая: 1. Влияние постоянной времени интегрирования регулятора Тp. Величина этой постоянной времени определяется принятым соотношением постоянных времени
2. Влияние постоянной времени обратной связи регулятора
1) 4)
Рис.4.3 Кривая переходного процесса h(t) замкнутой САР
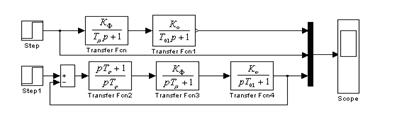
5) 3.2. Создание модели одноконтурной системы с последовательной коррекцией С помощью программы математического моделирования MATLAB – Simulink произведем моделирование переходных процессов одноконтурной системы с последовательной коррекцией. Для этого, прежде всего, необходимо создать модель исследуемой САР. При создании модели в соответствии со структурной схемой САР необходимо использовать следующие блоки Simulink: 1.Мультиплексор (смеситель) Mux из раздела Signal Routing Назначение: объединяет входные сигналы в вектор(cм.Л.р.№2). 2. Генератор ступенчатого сигнала Step из раздела Sources - источники сигналов. Назначение: формирует ступенчатый сигнал(см. Л.р.№1). 3. Блок передаточной функции Transfer Fcn из раздела Continuous – аналоговые блоки. Назначение: блок передаточной характеристики Transfer Fcn задает передаточную функцию в виде отношения полиномов(см. Л.р.№1). Входной сигнал блока должен быть скалярным. В том случае, если коэффициенты числителя заданы вектором, то выходной сигнал блока будет также скалярным (как и входной сигнал). 4. Осциллограф Scope из раздела Sinks - приемники сигналов. Назначение: строит графики исследуемых сигналов в функции времени. Позволяет наблюдать за изменениями сигналов в процессе моделирования(см. Введение). 5. Блок вычисления суммы Sum из раздела Math – блоки математических операций. Назначение: выполняет вычисление суммы текущих значений сигналов(см. Л.р.№1). Создание модели в среде Simulink. Для исследования одноконтурной САР в окне модели Simulink создаётся два типа моделей: 1) Модель замкнутой системы с последовательной коррекцией при оптимальной настройке регулятора и модульному оптимуму и разомкнутой части системы из последовательно соединённых звеньев Wо1(р) и Wф(р) представленную на рис. 4.4; 2) Модель одноконтурной САР с последовательной коррекцией при различной настройке регулятора: - при изменении постоянной времени Тр регулятора; - при изменении постоянной времени Тр1 регулятора. Схемы моделей представлены на рис.4.5.
Рис. 4.4 Модель объекта регулирования и одноконтурной оптимальной замкнутой системы регулирования
3.3. Расчёт переходных процессов по методу компьютерного моделирования После создания модели исследуемой САР производится расчёт и установка параметров модели отдельных звеньев САР в соответствии с заданием преподавателя. Расчёт параметров представляется в таблице 4.1.
Примечание: В учебном пособии в качестве примера приняты следующие параметры звеньев САР: Кф=9; Тμ=0.08с; К0=4; Т01=0.16с. При выполнении же лабораторных работ параметры звеньев объекта регулирования берутся из задания на курсовую работу [таблица 4.1] либо могут быть заданы преподавателем.
Таблица 4.1 Расчёт параметров звеньев модели САР.
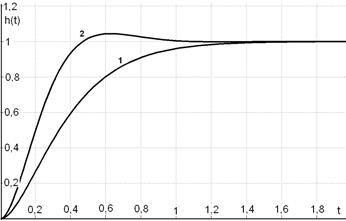
Расчёт переходных процессов с использованием первой модели (рис.4.4) позволяет: - уяснить возможность компенсации больших постоянных времени с помощью регуляторов оптимально-настроенных прямых по мобильному оптимуму; - получить показатели качества одноконтурной системы регулирования. Кривые переходных процессов с заданными параметрами звеньев представлены на рис. 4.6. Запустив модель и дважды щёлкнув на блоке Scope первой модели, получим кривые переходных процессов разомкнутой схемы объекта регулирования (кривая 1) и замкнутого оптимального контура (кривая 2). С целью проверки полученной в результате расчёта кривой оптимального переходного процесса можно применить аналитический метод с помощью выражения, полученного применением обратного преобразования Лапласа к передаточной функции оптимального разомкнутого и замкнутого контуров
Т.е.
Рис. 4.6 Переходный процесс оптимально построенной по модульному оптимуму одноконтурной САР
Расчет данных для построения кривой переходного процесса представлен в таблице 4.2. Таблица 4.2 Расчет переходной функции h(t)
Кривая переходного процесса h(t) замкнутой САР представлена на рис.4.3. При исследовании второй модели (рис. 4.5) одноконтурной САР с использованием параметров звеньев, заданных в таблице 4.1 получены две серии графиков (при принятых ранее параметрах звеньев): 1) при изменении постоянной времени интегрирования Тр при Тр1=const (рис. 4.7,а):
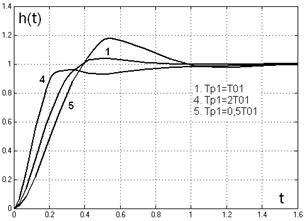
2) при изменении постоянной времени обратной связи регулятора Тр1 при Тр=const (рис. 4.7,б):
Результаты расчетов представляются как в виде графиков, так и таблиц.
а)
б) Рис. 4.7 Кривые переходных процессов в одноконтурных САР при изменении параметров регулятора: а)- при изменении Tp; б) - при изменении Tp1
По полученным кривым переходных процессов определяются динамические показатели качества одноконтурных САР с последовательной коррекцией, представленных в таблице 4.2:
σ%= f= T п – период колебаний; ω=2πf – угловая частота колебаний. По полученным показателям качества делаются выводы о влиянии на настройку регулятора изменения его параметров.
3.4. Исследование динамических свойств контура регулирования на MATLAB. Control System Toolbox Динамические свойства контуров регулирования САР могут быть исследованы с помощью комплекта инструментальных средств "Control System"- набора функций MATLAB для моделирования, анализа и проектирования автоматических систем управления. Функции в этом комплекте инструментальных средств работают с широко распространенной классической передаточной функцией и "современными" методами управления в пространстве состояний. С помощью этих инструментальных средств можно моделировать и анализировать системы как в дискретной, так и в непрерывной областях. Графики временных характеристик и корневого годографа могут быть быстро вычислены и построены. Возможности библиотеки Системное моделирование(System Models): · Описание дискретных и непрерывных систем. · Пространство состояний, функции преобразования, полюса и нули, элементарные модели в виде передаточных функций. · Построение линейной модели системы. · Модельные преобразования: из дискретной в непрерывную область, модель пространства состояний к передаточной функции и другим моделям. Анализ (Analysis): · Функции временных характеристик: импульсная ПФ, зависимость от периода дискретизации, переходная характеристика, обобщенное линейное моделирование. · Функции частотных характеристик: Боде, Николса, графики сингулярных значений. Моделирование объекта управления (Control Design): · Оптимизация обратной связи: выбор коэффициентов демпфирования, запас устойчивости по фазе и амплитуде, расположение полюсов, корневой годограф, интерактивное определение усиления, LQR/LQE проект. · Реализационная модель: управляемость, реализация с использованием минимального количества компонент математической модели, модель с корректирующим устройством, уменьшение порядка модели. · Свойства модели: наблюдаемость и управляемость Грамиана, наблюдаемость и управляемость матрицы, нули передачи, уравнение Ляпунова, отклик на ковариацию. 3.4.1. Последовательность выполнения работы В Control System Toolbox имеется тип данных, определяющих динамическую систему в виде комплексной передаточной функции. Синтаксис команды, создающий LTI-систему c одним входом и одним выходом в виде передаточной функции:
TF([bm, …, b1, b0], [an, …, a1, a0]), где bm, …, b1 – значения коэффициентов полинома В в (1.3); an, …, a1 – значения коэффициентов полинома A в (1.3). Для выполнения работы могут применяться команды, приведенные в таблице 4.3 Для определения корней полиномов степени k, может, также, применяться команда MATLAB roots(P), которая, в качестве аргумента P, получает матрицу коэффициентов полинома [pk, …, p0]. Другим вариантом получения графиков динамических характеристик САУ является использование графического интерфейса ППП CST – LTI viewer, вызов которого осуществляется командой ltiview, которой в качестве параметра можно указать имя переменной, содержащей LTI-объект. Таким образом, выполнение лабораторной работы состоит из следующих шагов: 9. Изучить теоретические сведения. 10. Запустить систему MATLAB. 11. Создать tf-объект, в соответствии с заданным вариантом. 12. Определить полюса передаточной функции 13. Определить нули передаточной функции 14. Используя LTI-viewer, или соответствующие команды (табл.2.1) получить динамические характеристики – переходную функцию h(t), импульсно-переходную функцию w(t) и частотные характеристики – диаграмму Боде, частотный годограф Найквиста. 3.5. Исследование динамических свойств контура регулирования на MATLAB при изменении постоянной времени обратной связи регулятора. Имея передаточные функции разомкнутой и замкнутой САР (рассчитаны выше аналитическим способом), построим ЛАЧХ и ЛФЧХ разомкнутой и замкнутой САР.
ЛАЧХ и ЛФЧХ разомкнутой САР Для первого случая:
Для второго случая (аналогично первому):
Для третьего случая:
1. Создадим LTI-объекты с именами w1, w2, w3, для этого выполним: >> w1=tf([1],[0.0128 0.16 0]) Transfer function: 1 ------------------- 0.0128 s^2 + 0.16 s
>> w2=tf([1],[0.0064 0.08 0]) Transfer function: 1 ------------------- 0.0064 s^2 + 0.08 s >> w3=tf([1],[0.0256 0.32 0]) Transfer function: 1 ------------------- 0.0256 s^2 + 0.32 s >> 2. Построим импульсную переходную функцию командой impulse(w1, w 2, w 3).
Рис. 4.8 Импульсная переходная функция разомкнутой САР при изменении постоянной времени интегрирования регулятора
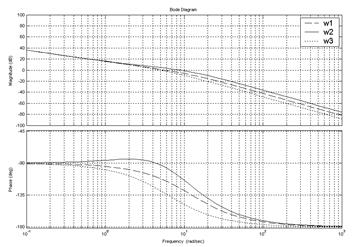
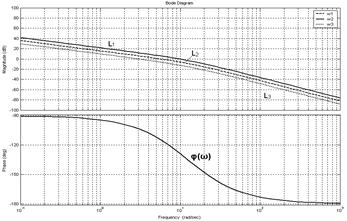
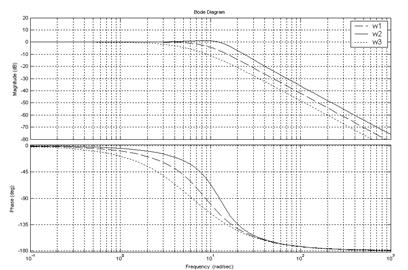
3. Построим ЛАЧХ и ЛФЧХ (диаграмму Боде), используя команду bode(w1, w 2, w 3).
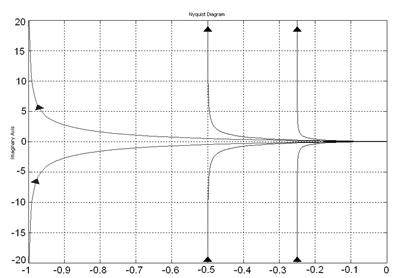
Рис. 4.9 ЛАЧХ и ЛФЧХ разомкнутой САР при изменении постоянной времени обратной связи регулятора 4. Определим частотный годограф Найквиста, выполнив команду ny qu ist(w1, w 2, w 3)
Рис. 4.10 Частотный годограф Найквиста разомкнутой САР при изменении постоянной времени обратной связи регулятора ЛАЧХ и ЛФЧХ замкнутой САР. Для первого случая:
где T = Для второго случая (аналогично первому):
где T = Для третьего случая:
где T =2
Порядок действия аналогичен предыдущему для разомкнутой САР. 1. Создадим LTI-объекты с именами w1, w2, w3, для этого выполним: >> w1=tf([1],[0.0128 0.16 1]) Transfer function: 1 ----------------------- 0.0128 s^2 + 0.16 s + 1 >> w2=tf([1],[0.0064 0.08 1]) Transfer function: 1 ----------------------- 0.0064 s^2 + 0.08 s + 1 >> w3=tf([1],[0.0256 0.32 1]) Transfer function: 1 ----------------------- 0.0256 s^2 + 0.32 s + 1 >>
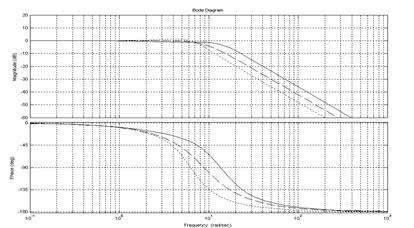
2. Построим ЛАЧХ и ЛФЧХ (диаграмму Боде), используя команду bode(w1, w 2, w 3).
Рис. 4.11 ЛАЧХ и ЛФЧХ замкнутой САР при изменении постоянной времени обратной связи регулятора 3.6. Исследование динамических свойств контура регулирования на MATLAB при изменении постоянной времени интегрирования регулятора Tр1.
Имея передаточные функции разомкнутой и замкнутой САР (рассчитаны выше аналитическим способом), построим ЛАЧХ и ЛФЧХ разомкнутой и замкнутой САР. Будем исследовать САР для трех случаев:
ЛАЧХ и ЛФЧХ разомкнутой САР Для первого случая:
Для второго случая:
Для третьего случая:
1. Создадим LTI-объекты с именами w1, w2, w3, для этого выполним: >> w1=tf([1],[0.0128 0.16 0]) Transfer function: 1 ------------------- 0.0128 s^2 + 0.16 s >> w2=tf([0.32 1],[0.002048 0.0384 0.16 0]) Transfer function: 0.32 s + 1 ---------------------------------- 0.002048 s^3 + 0.0384 s^2 + 0.16 s >> w3=tf([0.08 1],[0.002048 0.0384 0.16 0]) Transfer function: 0.08 s + 1 ---------------------------------- 0.002048 s^3 + 0.0384 s^2 + 0.16 s >> 2. Построим ЛАЧХ и ЛФЧХ (диаграмму Боде), используя команду bode(w1, w 2, w 3).
Рис. 4.12 ЛАЧХ и ЛФЧХ разомкнутой САР при изменении постоянной времени обратной связи регулятора
ЛАЧХ и ЛФЧХ замкнутой САР. Для первого случая:
Для второго случая:
Для третьего случая:
Порядок действия: 1. Создадим LTI-объекты с именами w1, w2, w3, для этого выполним: >> w1=tf([1],[0.0128 0.16 1]) Transfer function: 1 ----------------------- 0.0128 s^2 + 0.16 s + 1 >> w2=tf([0.32 1],[0.002048 0.0384 0.48 1]) Transfer function: 0.32 s + 1 -------------------------------------- 0.002048 s^3 + 0.0384 s^2 + 0.48 s + 1 >> w3=tf([0.08 1],[0.002048 0.0384 0.24 1]) Transfer function: 0.08 s + 1 -------------------------------------- 0.002048 s^3 + 0.0384 s^2 + 0.24 s + 1 >> 2. Построим ЛАЧХ и ЛФЧХ (диаграмму Боде), используя команду bode(w1, w 2, w 3).
Рис. 4.13 ЛАЧХ и ЛФЧХ замкнутой САР при изменении постоянной времени обратной связи регулятора ЛАБОРАТОРНАЯ РАБОТА № 5 Исследование однократно интегрирующей статической САР с последовательной коррекцией
Цель работы: Исследование и изучение динамических, статических свойств и частотных характеристик САР с последовательной коррекцией. Определение основных показателей качества САР. 1. Математическое моделирование. Расчетно-экспериментальная часть. 1.1. Теоретическая часть. Ознакомиться с принципом составления структурной схемы двухконтурной статической системы, построенной по модульному оптимуму, с принципом составления передаточных функций САР по управляющему и возмущающему воздействиям, с методами исследования динамических систем. 1.2. Определение параметров структурной схемы двухконтурной статической САР. 1.3. Создание модели двухконтурной статической САР. 1.4. Исследование динамических свойств статической САР с последовательной коррекцией при управляющем и возмущающем воздействиях по методу структурного моделирования, при представлении внутреннего контура колебательным либо инерционным звеном первого порядка. 1.5. Аналитический расчёт переходных процессов в двухконтурных САР. 1.6. Частотный анализ двухконтурной САР с использованием пакета МАТLAB.
2. Расчетная и графическая часть. Составление отчета. 2.1 Представить цель и программу работы, содержание расчетно-экспериментальной части. 2.2 Составить структурную схему двухконтурной системы, построенной по модульному оптимуму. Определить передаточные функции регуляторов. Определить параметры звеньев САР. 2.3 Создать и представить модель двухконтурной оптимальной статической САР с внутренним замкнуты
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2021-03-09; просмотров: 206; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.144.212.145 (0.335 с.) |
 , из которых наименьшей является постоянная времени
, из которых наименьшей является постоянная времени  .
.
 является фильтром, обеспечивающим необходимую помехозащищённость системы, а следовательно, её работоспособность.
является фильтром, обеспечивающим необходимую помехозащищённость системы, а следовательно, её работоспособность. интегрирующего звена, что обеспечивает повышение точности регулирования и быстродействия контура. Наименьшая постоянная времени объекта регулирования
интегрирующего звена, что обеспечивает повышение точности регулирования и быстродействия контура. Наименьшая постоянная времени объекта регулирования  при этом не компенсируется.
при этом не компенсируется. . (4.1)
. (4.1)  , (4.2)
, (4.2) - постоянная времени интегрирования контура.
- постоянная времени интегрирования контура. . (4.3)
. (4.3) . (4.4)
. (4.4) .
.  , то получим коэффициент демпфирования
, то получим коэффициент демпфирования ,
, ,
,  . Такую настройку называют оптимальной по техническому или модульному оптимуму.
. Такую настройку называют оптимальной по техническому или модульному оптимуму. (4.5)
(4.5) (4.6)
(4.6) (4.7)
(4.7) - эквивалентная постоянная времени внутреннего замк нутого контура;
- эквивалентная постоянная времени внутреннего замк нутого контура; - относительный коэффициент затухания.
- относительный коэффициент затухания. ; (4.8)
; (4.8) - наименьшая некомпенсируемая постоянная времени;
- наименьшая некомпенсируемая постоянная времени;
 (4.9)
(4.9)
 (4.10)
(4.10)
 (4.11)
(4.11)
 (4.12)
(4.12)
 %
%
 1/ с
1/ с
 Гц
Гц






 );
); - показатель колебательности.
- показатель колебательности. (w) частотных характеристик.
(w) частотных характеристик. ) и инерционным звеном объекта регулирования с постоянной времени Т01.
) и инерционным звеном объекта регулирования с постоянной времени Т01. (4.13)
(4.13) - постоянная времени интегрирования регулятора.
- постоянная времени интегрирования регулятора.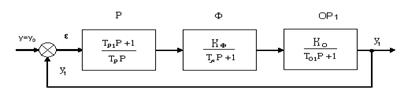
 . На практике в зависимости от требований к динамике САР обычно принимают величину
. На практике в зависимости от требований к динамике САР обычно принимают величину  - базовый вариант оптимальной настройки
- базовый вариант оптимальной настройки

 :
:
 ;
;
 ;
;

 .
.

 ,
, .
. .
.







 - время установления, т.е. достижения в первый раз установив- шегося значения;
- время установления, т.е. достижения в первый раз установив- шегося значения; - время максимального перерегулирования;
- время максимального перерегулирования; - относительное время регулирования(время переходного процесса) достижения y=0.98∙yуст;
- относительное время регулирования(время переходного процесса) достижения y=0.98∙yуст; - перерегулирование;
- перерегулирование; - частота колебаний;
- частота колебаний;
 с использованием команды roots или pole.
с использованием команды roots или pole. с использованием команды roots или zero.
с использованием команды roots или zero.


 Порядок действий:
Порядок действий: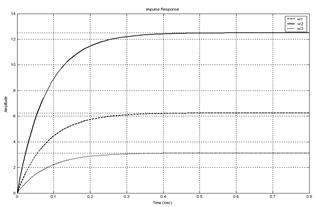

 =0,113 с, а
=0,113 с, а  =0,707.
=0,707.
 =0,08 с, а
=0,08 с, а  =0,5.
=0,5.
 =0,16 с, а
=0,16 с, а  .
.
 при
при 


 Порядок действия:
Порядок действия: