Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Список рекомендуемой литературы ⇐ ПредыдущаяСтр 4 из 4
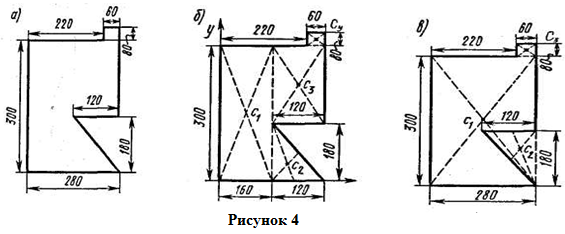
1. Аркуша А.И., Фролов М.И. Техническая механика. – М.: Высшая школа, 1989. 2. Аркуша А.И. Руководство к решению задач по теоретической механике./ Учебное пособие для средних специальных учебных заведений. – М.: Высшая школа, 2002. 3. Куклин Н.Г., Куклина Г.С. Детали машин. - М: Машиностроение, 2009. 4. Мовнин М.С. и др. Основы технической механики: Учебник для технологических немашиностроительных специальностей техникумов и колледжей– Л.: Машиностроение, 2007. 5. Никитин Е.М. Теоретическая механика для техникумов – М.: Наука, 2008 6. Эрдеди А.А. и др. Техническая механика. - М.: Высшая школа, 2010 МЕТОДИЧЕСКИЕ УКАЗАНИЯ К ВЫПОЛНЕНИЮ КОНТРОЛЬНОЙ РАБОТЫ В задачах статики приходится рассматривать равновесие несвободных тел, лишенных возможности перемещаться в направлении действия приложенных к ним так называемых активных сил. Тела, ограничивающие движение рассматриваемого тела, называются связями. Между телом и связью на основании закона равенства действия и противодействия возникают равные и противоположно направленные силы взаимодействия. Сила, с которой связь действует на рассматриваемое тело, называется реакцией связи или просто реакцией. Сила, с которой тело действует на связь, называется силой давления на связь. Таким образом, сила реакции и сила давления на связь – две равные по модулю силы, имеющие противоположное направление. Задачи на равновесие несвободных тел решаются в такой последовательности: 1 Выяснить, какое тело (точка) в данной задаче находится в состоянии равновесия, и приложить к нему заданные силы. 2 Выделенное тело освободить от связей и их действие заменить силами реакций. 3 Выбрать направление координатных осей. 4 Составить уравнения равновесия в одном из двух видов: 5 Решить уравнения равновесия. 6 Проверить правильность решения задачи. Методику решения задач с помощью уравнений равновесия рассмотрим на примерах. Первую задачу, можно решать после изучения тем 1.3 «Пара сил» и 1.4 «Плоская система произвольно расположенных сил». Проекция вектора – скалярная величина, которая определяется отрезками, отсекаемыми перпендикулярами, опущенными из начала и конца вектора на ось. Проекция вектора считается положительной (+), если направление ее совпадает с положительным направлением оси (рисунок 1, а), и отрицательной (-), если проекция направлена в противоположную сторону (рисунок 1, б). Если сила перпендикулярна оси, то её проекция равна нулю (рисуное 1,в).
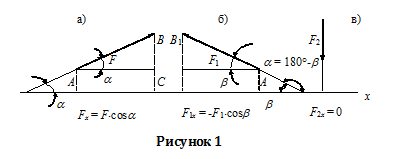
Моментом силы относительно точки называется произведение модуля силы на плечо, т.е. на длину перпендикуляра, восстановленного из точки, относительно которой берется момент, к линии действия силы. Момент принято считать положительным, если он стремится повернуть тело по часовой стрелке (рисунок 2, а), и отрицательным (рисунок 2, б), если вращение направлено в противоположную сторону.
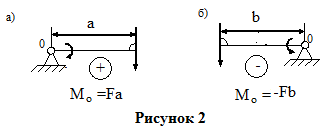
Между моментом пары и моментами сил пары относительно любой точки существует такая важная зависимость: алгебраическая сумма моментов сил пары относительно любой точки – величина постоянная для данной пары и равна ее моменту. Так как пара сил не имеет равнодействующей, ее нельзя уравновесить одной силой. Момент пары сил в СИ выражается в ньютонометрах (Н×м) или в единицах, кратных ньютонометру: кН×м, МН×м и т.д. Пример 1. Однородная балка закреплена в точке A с помощью шарнирно-неподвижной опоры и поддерживается в точке B стержнем (рис.3, а). Найти реакции шарнирно-неподвижной опоры и стержня BC. Силой тяжести балки и стержня пренебречь. Последовательность определения момента силы F относительно оси z (рис.2, в): а) задают модуль и направление силы F; б) указывают координатные оси; в) перпендикулярно оси выбирают плоскость X 0 Y; г) силу F проецируют на эту плоскость и определяют модуль Fxy этой проекции; д) опустив перпендикуляр из начала координат на проекцию Fxy, определяют плечо a = OK; е) определяют момент Mz (F) = Fxya. Момент силы относительно оси равен нулю, если сила и ось лежат в одной плоскости: а) сила действует вдоль оси; б) сила F пересекает ось z; в) сила F параллельна оси z.
Решение. Изобразим балку вместе с нагрузками, соблюдая заданные размеры ее участков и угла a (рисунок 3, б). Освободим балку от связей в точках A и B, заменив эти связи их реакциями. Начало координат поместим в точке A, ось x совместим с осью балки, а ось y направим перпендикулярно балке. Если стержень растягивается, то его реакция направлена в сторону от рассматриваемого тела, а при сжатии – от стержня к телу.
Составим три уравнения равновесия:
Уравнение проекций сил на ось x имеет вид
Силы F и YA не вошли в уравнение, так как они перпендикулярны оси x и их проекции на эту ось равны нулю. Проекции силы на ось y
реакция XA перпендикулярна оси y и ее проекция на эту ось равна нулю. Для составления уравнения моментов за центр моментов принимаем точку A. Плечо силы RB равно длине перпендикуляра, восстановленного из точки A (центра моментов) к линии действия силы RB. Из рисунка 3, б видно, что
Подставив числовые значения, получим
Выразим из (2) Подставив значения сил, получим
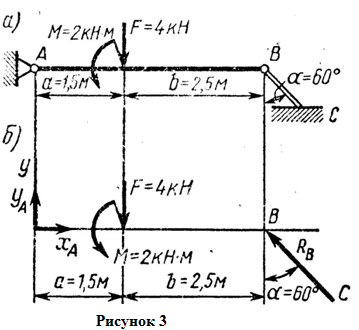
Из уравнения (1) Проверим правильность решения задачи, составив уравнения моментов относительно точки B: Подставив числовые значения 3000×4-2000-4000×2,5=0; 12000-12000=0. Задача решена верно, так как при подстановке получили тождество 0=0. Вторую задачу контрольной работы решать после изучения темы 1.5 «Центр тяжести». В этих задачах требуется находить центр тяжести плоских фигур, составленных из простых геометрических фигур. Положение центра тяжести плоской фигуры определяется по формулам: где xC и yC – искомые координаты центра тяжести фигуры; xi и yi – координаты центров тяжести составных частей фигуры, которые определяются из заданных размеров; Ai – площади составных частей. Последовательность решения таких задач рассмотрена в примере. Пример 2. Вычислить координаты центра тяжести сечения плоской фигуры (рисунок4, а). Решение. Заданную плоскую фигуру разбиваем на составные части, центры тяжести которых легко определяются (рисунок 4, б) – прямоугольник I, треугольник II и прямоугольники III и IV. Располагаем координатные оси, как показано на рисунке 4, а.
Находим площади каждой части и координаты xi и yi их центров тяжести/ Все эти данные заносим в таблицу 1. Таблица 1 Составная часть | Площадь составной части Ai, мм2
|
|||||||||||
|
|
Последнее изменение этой страницы: 2021-01-08; просмотров: 68; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 52.14.218.79 (0.011 с.) |
||||||||||||
 либо
либо 
 - алгебраическая сумма проекций сил на ось x;
- алгебраическая сумма проекций сил на ось x; - алгебраическая сумма проекций сил на ось y;
- алгебраическая сумма проекций сил на ось y; - алгебраическая сумма моментов относительно точки A.
- алгебраическая сумма моментов относительно точки A. (1)
(1) (2)
(2) .
. (3)
(3) Н.
Н.
 Н.
Н. Н.
Н.
 и
и