Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Вывод из эксплуатации средств традиционного навигационного обеспечения⇐ ПредыдущаяСтр 11 из 11
Введение в действие концепции CNS/ATM в части навигационного обеспечения позволит вывести из эксплуатации следующие системы: - импульсная радиотехническая система дальней навигации OMEGA; - импульсно–фазовая радиотехническая система дальней навигации LORAN-C. В 1994г. США закончили поддержку станций LORAN-C за пределами континентальной части США, а оставшиеся цепи прекратили функционирование в 2000г. Однако в 1992г. Дания, Франция, Германия, Ирландия, Нидерланды и Норвегия договорились об установке гражданской системы LORAN-C для Северо - Западной Европы. В настоящее время LORAN-C успешно функционирует в этом регионе и будет функционировать в обозримом будущем; - приводные радиостанции (ПРС) не планируется полностью выводить из эксплуатации, однако, по мере того, как радиомаяки вырабатывают свой ресурс, гражданские власти примут решение о целесообразности их замены. Ожидается, что в обозримом будущем ПРС будут функционировать, однако их количество постепенно уменьшится; - радиотехническая система ближней навигации TACAN. - азимутально-дальномерные радиомаяки VOR/DME. Планируется, что многоканальные DME повсеместно заменят VOR/DME, поскольку действующая структура системы ОрВД постепенно переходит к средствам зональной навигации.
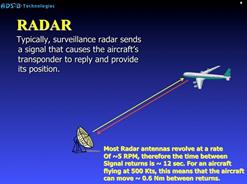
Наблюдение С появлением спутниковый радионавигационных систем (СРНС) второго поколения положение воздушных судов (ВС) стало лучше определяться их бортовыми навигационными комплексами, чем наземными средствами наблюдения. Передача информации о местоположения ВС с борта на землю позволяет получить высокоточную и оперативную информацию о воздушной обстановки. В настоящее время в гражданской авиации основу средств наблюдения за окружающей воздушной обстановкой представляют радиолокационные средства ВОРЛ (вторичный обзорный радиолокатор), являющиеся громоздкими, дорогостоящими в установке и обслуживании устройствами со сложными антенно-фидерными устройствами. Размещение данного оборудования сопряжено с рядом особенностей строительства и вводом в эксплуатацию объектов, экологическими вопросами, а также трудоемкостью технического обслуживания, что делает их непригодными для поддержки функций ОрВД в ряде районов Российской Федерации, особенно в районах Крайнего севера и Арктики, а также для контроля за полетами воздушных судов (ВС) на малых высотах.
АЗН-В является перспективной базовой технологией в соответствии с принятой ИКАО концепцией развития средств связи, навигации, наблюдения и организации воздушного движения (CNS/ATM) и практически безальтернативным способом обеспечения безопасности воздушного движения в регионах со слабой аэронавигационной инфраструктурой. В отличие от радиолокационных средств наблюдения наземные станции АЗН-В обладают низким энергопотреблением, значительно меньшей стоимостью, не имеют в своем составе подвижных и вращающихся конструкций, обеспечивают большую точность позиционирования ВС, обеспечивают поле наблюдения за ВС на малых и предельно малых высотах. По своей сути АЗН-В призвана стать "убийцей" радаров. Оригинальное название АЗН-В звучит так: ADS-B Automatic Dependent Surveillance-Broadcast. (ADS - B Technologies - инженерно-техническая консалтинговая компания в Анкоридже, Аляска, которая предоставляет специализированные услуги по управлению воздушным движением и управлению воздушным движением.) ADS-B, или Автоматическое Зависимое Наблюдение в режиме Вещания (АЗН-В) — это технология, которая позволяет наземным службам управления воздушным движениям, а проще — диспетчеру, знать координаты воздушного судна, которое он сопровождает. Каждое слово в аббревиатуре АЗН-В несет определенный смысл. Расплывчатое слово «наблюдение» (surveillance) означает, что диспетчер «наблюдает» за самолетом, и поэтому как минимум знает его координаты — местоположение на карте воздушной обстановки и высоту. В дополнение к этому, диспетчер из данных наблюдения получает бортовой номер самолета, а также дополнительную информацию, которую самолет может передать по каналу наблюдения. Отличие АЗН-В от традиционных видов наблюдения, таких например как вторичный радиолокатор — ВРЛ (Secondary Surveillance Radar — SSR), или первичный радиолокатор — ПРЛ (Primary Surveillance Radar — PSR) заключается в том, что координаты борта не определяются наземными средствами, как это происходит в случае с радиолокаторами. Радиолокатор является независимым средством наблюдения, потому что определяет координаты самолета самостоятельно. В отличие от ВРЛ и ПРЛ, технология АЗН-В является зависимой. Это означает, что координаты самолет определяет свои координаты самостоятельно, с помощью бортового оборудования, и уже потом передает их наземным службам.
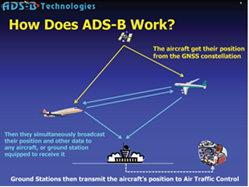
Каким образом борт определяет свои собственные координаты? Все, что требуется — это приемник GPS на борту и средства передачи данных по радиолинии земля — борт. На земле не требуется никаких локаторов и радиомаяков — только принять данные по радиолинии и отобразить их диспетчеру. Отображение информации АЗН-В осуществляется на электронных планшетах (цифровых индикаторах) и позволяет экипажу ВС на цифровой карте (на фоне подстилающей поверхности) наблюдать собственное местоположение и местоположение других участников воздушного движения с дополнительной информацией о каждом объекте АЗН-В. То обстоятельство, что в определении координат воздушного судна мы вынуждены полагаться оборудование этого же судна, а не на наземное оборудование, делает наблюдение зависимым. При отказе средства определения координат — GPS наблюдение делается невозможным, чего не может произойти при использовании независимых средств наблюдения. Как мы видим, технология АЗН-В сильно упрощает процедуру наблюдения. Automatic - Он всегда включен и не требует вмешательства оператора Dependent - Это зависит от точного сигнала GNSS для данных о местоположении. Surveillance - Он предоставляет услуги наблюдения, подобные радару, как и RADAR. B Roadcast - Он непрерывно передает данные о местоположении самолета и другие данные на любой самолет или наземную станцию, оборудованную для приема ADS-B. На самом деле, радиолиния в случае вещательного (broadcast) АЗН не является двухточечной — с борта только до определенного наземного оборудования. Данные с борта передаются в широковещательном режиме на стандартной частоте 1090 МГц, и любой, у кого есть приемник этого диапазона и средства обработки данных в соответствии с протоколом АЗН, может получить координаты всех воздушных судов в зоне действия бортового передатчика 1090. Этим вещательное АЗН-В (ADS-Broadcast) отличается от контрактного АЗН-К (ADS-Contract), в котором сообщения передаются строго тому, для кого они предназначены. К настоящему времени существуют системы АЗН двух основных типов: · АЗН-К контрактного типа (ADS-C) · АЗН-В широковещательного типа (ADS-B) При контрактном АЗН возможны следующие варианты: · Передача регулярных сообщений, согласно которым на борту ВС сообщения составляются и передаются с указанным в контракте интервале; · Передача не регулярных сообщений, согласно которым на борту ВС сообщения составляются и передаются в тех случаях, которые предусмотрены контрактом- при изменение высоты полета, пролеты точки маршрута и др.; · Передача сообщений по запросу, согласно которому на борту ВС сообщение составляется и передается только в том случаи, если поступила команда с Земли. Использование системы АЗН позволяет вести наблюдение и контролировать полет ВС практически на всем его маршруте независимо от места взлета и посадки без использования наземных РЛС, осуществлять дозаправку топливом в процессе полета. Одним из преимуществ АЗН являются расширенные зоны наблюдения вне зон действия радиолокационных систем, над морскими регионами и труднодоступными участками Земли.
Информация системы АЗН позволяет расширить следующие задачи: ·Контроль за местоположением; ·Контроль соответствия положения ВС с ожидаемым местоположением, имеющемся в текущем плане полетов; · Определение конфликта, базирующее на анализе данных об эшелонирование воздушных судов; · Предсказание конфликта, основывающееся на определении потенциальных нарушений норм эшелонирования; · Управление полетом на основе выработки оптимальных топливосберегающих маршрутов
Для справки Благодаря АЗН-В работает знаменитый сервис Flightradar24, который выводит информацию о воздушных судах в режиме реального времени. Технология обладает рядом преимуществ, среди которых – высокий темп обновления данных (для традиционных радиолокаторов он составляет порядка 10 секунд, для АЗН-В — одна секунда) Для наглядности ниже представлена иллюстрация того, как работает традиционный вторичный радиолокатор и АЗН-В
В ЕС отчитались, что за последний год бортовое оснащение АЗН-В 1090ES выросло вдвое и достигает 40% (данные на апрель 2019 г). Оборудование уже не первый год ставят на новые лайнеры прямо на заводе. К слову, новый инновационный российский лайнер МС-21 также будет оснащаться АЗН-В 1090ES, что называется, «по умолчанию». Важно обратить внимание на то, что вышеперечисленные сильные стороны АЗН-В применимы в полной мере только к линии передачи данных (ЛПД) 1090ES. UAT используют только для самолетов АОН и только в США. VDL-4 же в принципе не может похвастаться ни большим количеством оборудованных бортов в небе, ни общемировой тенденцией роста – данный тип ЛПД не принят к эксплуатации ни одной страной мира. После проведения ряда исследований и рабочих групп, мировая гражданская авиация де-факто остановила свой выбор на АЗН-В 1090ES. Сейчас эта линия передачи данных применяется в более чем 50 странах мира. UAT так и осталась исключительной особенностью США, а разговоры о VDL-4 в общемировом пространстве практически прекратились. Для справки Частоты: 978 МГц (UAT); 1090 МГц (1090ES); 108-118 МГц (VDL-4). Скорость передачи данных: 1 Мбит/с (1090ES и UAT); 19,2 Кбит/с (VDL-4). Страны: США (UAT); США, ЕС, Великобритания, Индия, Австралия, Индонезия и другие (~50 стран, 1090ES); Швеция, Россия (VDL-4, опытная эксплуатация).
Концепция ADS-B включает в себя четыре сервиса:
ADS-B. Естественно это сама система ADS-B в первую очередь. Ее суть состоит в том, что каждый самолет передает широковещательно сообщения с данными, которые принимают другие самолеты или наземные станции для диспетчерских потребностей. ADS-R. Automatic Dependant Surveillance-Rebroadcast, система ретрансляции данных ADS-B для UAT и обратно. Самолеты оборудованные UAT будут видеть самолеты оборудованные ADS-B и наоборот. UAT используется на старых самолетах и на легкомоторной авиации. Сервисы ADS-B и ADS-R относятся к сервисам "слежения и сопровождения" и отнесены FAA к критически важным для диспетчерских целей. TIS-B. Traffic Information Service—Broadcast. Этот сервис состоит в том, что наземные радарные системы отслеживают все объекты и передают информацию о них как в ADS-B так и в UAT системах. Это дает мощное видение обстановки вокруг для всех самолетов, вся информация выдается на дисплей в кабине летчиков. FIS-B. Flight Information Service—Broadcast. Этот сервис состоит в том, что наземные станции передают информацию о погоде и аэронавигации в графическом виде для UAT систем. Пилот наглядно представляет условия полета, которые могут гибко меняться. Презентация Развитие подсистемы наблюдения Для целей наблюдения, согласно разработанной ИКАО концепции CNS/ATM, предусматривается применение радиолокационного метода с использованием ВРЛ в режимах А/С/S и метода автоматического зависимого наблюдения (АЗН – ADS – Automatic Dependent Surveillance). Режим S ВОРЛ ВРЛ будет использоваться в континентальном воздушном пространстве с высокой плотностью воздушного движения и в районах аэродромов. Предусматривается, что точность и качество информации о местоположении ВС, получаемой в режимах А/С системы RBS, будут улучшены применением моноимпульсных методов обнаружения и/или использованием антенн с большим вертикальным раскрывом. Усовершенствованный ВРЛ с режимом S (Selective – Адресный) обеспечит возможность использования избирательных адресных линий передачи данных, более надежное опознавание ВС и передачу дополнительной (полетной) информации. Это позволит существенно повысить эффективность наблюдения и безопасность полетов. В настоящее время предполагается следующее обязательное использование приемопередатчиков режима S ВОРЛ: - для полетов по приборам (ППП) в воздушном пространстве, определенном соответствующими властями, - как минимум 2 уровня, с возможностями дискретно-адресной маячной системы DABS-Discrete Address Beacon System (для новых ВС с 1 января 2001 года и для всех ВС с 1 января 2003 года);
- для полетов по правилам визуальных полетов (ПВП), совершаемых в воздушном пространстве, в котором уже введено обязательное использование приемоответчиков вторичной радиолокации, - как минимум 2 уровня, с возможностями DABS (для новых ВС с 1 января 2003 года и для всех ВС с 1 января 2005 года). Ввод в эксплуатацию режима S начался в Североамериканском регионе в начале 1990-х годов и в Европейском регионе с 2000 года. Эксперты ИКАО полагают, что около 2400 ВС уже имеют оборудование для использования режима S.
АС УВД Необходимость и закономерность автоматизации процессов УВД Автоматизированные системы управления воздушным движением явились естественным этапом развития технических средств, использовавшихся в этой области. От других широко распространенных в технике средств автоматизации АС УВД с самого начала отличались тем, что их целью была передача техническим средствам функций, а не выполнение отдельных операций. В связи с этим уже первые АС УВД должны были обладать высокой степенью сложности, так как были призваны исполнять цепочки действий, заменяя, таким образом, диспетчера службы УВД. Эти функции включали различные этапы обработки информации о воздушной обстановке и реализовывались в виде некоторых алгоритмов, т. е. определенных предписаний. Термин «алгоритм» применен здесь не в строгом математическом смысле, тем не менее ясно, что немыслимо проводить автоматизацию в области УВД без использования вычислительной техники достаточно высокой мощности, адекватной сложности решаемых задач. Рассмотрим специфические особенности деятельности диспетчера при уп-равлении воздушным движением. Это поможет глубже разобраться в существе дела, а именно в автоматизации процессов УВД. Диспетчер, как правило, выполняет следующие функции: наблюдение — получение информации о воздушной обстановке и первичное оценивание данных измерений; анализ данных — оценка их достоверности, идентификация, классификация и оценка параметров движения каждого ВС; обобщение — формирование общей картины воздушной обстановки; оценивание — распознавание опасных ситуаций: отклонений от плановой траектории, потенциально конфликтных ситуаций, опасных сближений; выработка решений — рассмотрение возможностей разрешения стан-дартных и нестандартных ситуаций; передача команд на ВС, контроль правильности их получения и исполнения. Особенности этого процесса таковы: функции и входящие в них операции выполняются последовательно; последовательность действий имеет циклический характер; все операции выполняются в реальном масштабе времени. С ростом интенсивности и плотности ВД, появлением высокоскоростных ВС большой пассажировместимости загрузка диспетчера возрастает настолько, что существенно повышается вероятность принятия им ошибочного решения или пропуск (несвоевременное обнаружение) опасных ситуаций. Простое увеличение количества диспетчеров не дает желаемого результата, так как увеличиваются объем и интенсивность обмена информацией между ними. Единственный выход заключается в передаче части функций диспетчера вычислительной системе. При этом немедленно возникает вопрос о степени автоматизации. В любой области существует некоторая рациональная степень автоматиза-ции производственных процессов, начиная от автоматизации отдельных операций и заканчивая построением полностью автоматических систем, в работе которых функции человека ограничиваются лишь контролем и, может быть, заданием режима работы. Примером такой весьма совершенной системы является система автоматического управления полетом (АБСУ), состоящая из вычислительной системы (ВСУП), вырабатывающей по заранее заданным законам (алгоритмам) и на основании информации, получаемой от соответствующих датчиков-измерителей сигналы управления, отрабатываемые автопилотом (АП) или САУ. Цель управления, заложенная в систему, обычно состоит в минимизации отклонений от заданных параметров управляемого процесса (например, от программной траектории движения). Роль экипажа заключается в запуске системы, установке режима, задании программы. Все эти акты одноразовые, так как система спроектирована таким образом, чтобы в стандартных условиях не требовалось постоянного вмешательства в ее работу. Это достигается тем,что системе придаются свойства устойчивости по отношению к малым (ограниченным) возмущениям. Пилот (экипаж) при этом не принимает прямого и непосредственного участия в выработке управляющих воздействий и лишь контролирует правильность работы и исправность автомата по показаниям специальных приборов-индикаторов (дисплеев). При необходимости пилот вмешивается в работу системы, изменяя режим или отключая ее вовсе. Наряду с автоматическим на борту применяется и так называемый директорный (полуавтоматический) режим. Он отличается тем, что пилот, как говорят, непосредственно включен в контур управления (автопилот при этом отключен) и управляет самолетом (вертолетом), исполняя команды, формируемые ВСУП и индицируемые на командном дисплее (или командном стрелочном приборе) в символической форме (обычно в виде отклонений некоторых специальных индексов). Задача пилота при этом состоит в том, чтобы, действуя на органы управления, «отработать» командные сигналы. В системах УВД все оказывается значительно сложнее. В зоне управления диспетчера находится, как правило, не одно, а множество ВС. С увеличением их числа сложность управления, связанная прежде всего с возникновением опасных ситуаций, растет не по линейному, а по экспоненциальному закону. Сравнивая с условиями на борту, можно утверждать, что при прочих равных условиях диспетчеру приходится вмешиваться в процесс управления значительно чаще, чем пилоту. Это означает, что даже при наличии в АС УВД мощного вычислителя, взявшего на себя все функции обработки информации, вплоть до выработки решений в типовых ситуациях, при возникновении нестандартной ситуации (вероятность которой также возрастает экспоненциально) диспетчеру приходится вмешиваться в процесс управления. Рассуждая подобным образом, мы исходим из того, что количество типов стандартных ситуаций, для которых разработаны алгоритмы работы системы, ограничено. Сократить число нестандартных ситуаций, для которых не рассчитаны алго-ритмы управления, можно, если пойти по известному пути создания адаптивных экспертных систем. Они, однако, предполагают выработку новых алгоритмов (стратегий) в процессе работы (самообучения), что неприемлемо в реальных условиях функционирования системы УВД, так как не гарантирует от принятия ошибочных решений. Системы строились в прошлом (и строятся в настоящее время) как автома- тизированные, где вычислительным средствам передается лишь часть функций и операций обработки информации по жестким алгоритмам, в то время как за человеком-оператором остаются те задачи, которые требуют творческого подхода и нестандартных решений в сложных ситуациях. По мере совершенствования АС УВД перечень функций и операций, которые полностью автоматизированы, расширяется и, следовательно, возрастают уровень автоматизации и степень совершенства систем аэроконтроля. Здесь уместно определить терминологию. Под системами аэроконтроля в широком смысле будем понимать технические средства автоматизации про-цессов УВД. Автоматизированные системы (АС) УВД — это системы с высоким уровнем автоматизации. В прошлом для систем низкого уровня использовался термин аппаратура отображения, а в последнее время их часто называют комплексами средств автоматизации (КСА) УВД. Последний термин не вполне удачен, однако мы его будем использовать, понимая под ним комплексы средств автоматизации наблюдения за воздушной обстановкой. Так как указанные функции осуществляются и в АС высокого уровня, то КСА включаются в их состав на правах подсистемы.
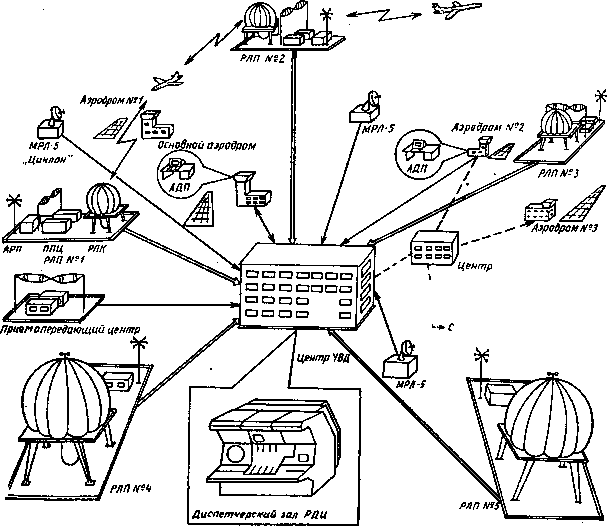
Автоматизация процессов ОВД является необходимым условием обеспечения безопасности полетов ВС гражданской авиации в настоящее время и в будущем, при увеличении интенсивности и плотности воздушного движения, возрастании нагрузки на диспетчеров всех секторов УВД. Кроме того, автоматизация ОВД позволяет повысить экономичность полетов и обеспечить их регулярность. Автоматизация УВД стала возможной благодаря внедрению вычислительной техники (начиная с 60-х годов XX века). Первая отечественная аэродромная АС УВД «Старт» начала работать с 1975 года. АС УВД – это человеко-машинные системы, обеспечивающие сбор, хранение, обработку и представление разнообразной информации о движении множества ВС человеку для оптимизации процессов УВД. На первом этапе автоматизации УВД решались задачи приема, хранения и отображения плановой информации, отображения действительного положения множества ВС, расчета параметров движения и экстраполяции их местоположения. Автоматизируются процессы передачи управления в смежные зоны УВД. Кроме того, на совмещенных индикаторах воздушной обстановки представляется картографическая и метеорологическая информация об опасных очагах грозовой деятельности. На втором этапе решаются задачи анализа воздушной обстановки и свое- временного предупреждения диспетчера о возможных сближениях ВС и дру- гих конфликтных ситуациях, таких как отклонение ВС от осевых линий трасс, снижение ниже минимальных безопасных высот, приближениях к зонам ограничения полетов или запретным зонам и т.п. На третьем этапе автоматизируются процессы выработки решений по УВД. Система представляет диспетчеру рекомендации в целях снижения вероятности ошибочных действий с его стороны. АС УВД относятся к классу жестко регламентированного режима реального времени, с высокой реактивностью на входной поток данных. Время доведения информации о состоянии процесса до удаленных абонентов должно составлять секунды, время обработки поступающих кодограмм сообщений – миллисекунды, время принятия решения и его доведения до исполнителей секунды. Технические средства этой территориальной системы могут развертываться на поверхности земли площадью в сотни тысяч квадратных километров. Радиолокационные комплексы, предназначенные для наблюдения движущихся воздушных судов (ВС), удалены друг от друга и от центра управления на сотни километров и сопряжены с ним среднескоростными телекодовыми трактами передачи данных. Приемопередающие центры, через которые осуществляется связь с ВС, связаны с диспетчерами телефонными каналами и т.д. АС УВД высокого уровня автоматизации оснащаются источниками первичной и вторичной радиолокационной информации, радиопеленгаторами. На них возлагаются процессы планирования в пределах зоны ответственности и непосредственного управления движением ВС на трассах и по маршрутам вне трасс в целях увеличения пропускной способности воздушного пространства (ВП) и экономичности перевозок при высоком уровне безопасности полетов. Основными задачами, решаемыми программным обеспечением, являются: -сбор, обработка и трансляция в центр управления по высокоскоростным каналам связи координатной информации от первичных и вторичных радио- локационных комплексов (РЛК) и автоматических радиопеленгаторов (АРП); -сбор, обработка и трансляция в центр управления метеорологической информации, поступающей от метеорадиолокаторов, пунктов зондирования атмосферы и метеостанций; -сбор, обработка и трансляция в центр управления радионавигационной информации, измеренной на бортах ВС и поступающей по каналам автомати- ческого зависимого наблюдения; - сбор информации о планах полетов, поступающей в систему автоматически по наземным каналам (авиационная наземная сеть передачи данных и телеграфных сообщений – АНС ПД и ТС), телефонам и радиоканалам от ВС с ручным вводом в систему, ее обработка и распределение по рабочим местам; - автоматический и ручной ввод в автосопровождение ВС по информации первичных и вторичных радиолокаторов; - хранение в системе стандартных, пассивных и текущих планов полетов; - формирование сводного суточного плана, печать элементов плана; - корректировка и рассылка текущих и суточных планов полетов по секторам управления и взаимодействующим службам и системам; - объективный контроль работы технических средств центра управления и периферийного оборудования; - тренировка диспетчерского персонала; документирование радиолокационной, плановой и речевой информации и ее воспроизведение; - форматно-логический контроль информации, вводимой в систему диспетчерами и операторами с помощью технических средств; - представление картографической и динамической радиолокационной информации на индикаторах воздушной обстановки. Решение перечисленных задач возможно лишь при согласованной работе всего многообразия технических средств, входящих в состав системы. Для организации взаимодействия элементов, для контроля состояния аппаратуры периферии и центра в программном обеспечении (ПО) АС УВД предусматривается специальный комплекс программ (КП) контроля и управления источниками информации (абонентами) и связью. На рис. 1.1 в качестве достаточно полного примера представлена структура районной АС УВД «Стрела», дающая представление об этих функциях. Условные обозначения: АДП – аэродромный диспетчерский пункт; АРП – автоматический радиопеленгатор; МРЛ – метеорологический радиолокатор; ППЦ – приемо-передающий центр; РДЦ – районный диспетчерский центр; РЛК – радиолокационный комплекс; РЛП – радиолокационная позиция.
При изучении схемы АС УВД необходимо обратить внимание на то, что, как и любая система автоматизации управления, она имеет структуру в виде замкнутого кольца с отрицательной обратной связью. В состав системы входят последовательно связанные подсистемы: – комплекс источников координатной информации (ПРЛ, ВРЛ, МРЛ, АРП и наземная часть системы АЗН); – комплекс сопряжения (связи с удаленными источниками информации) и предварительной обработки информации; – вычислительный комплекс; – комплекс отображения информации на ИВО и ТЗИ; – операторы (диспетчеры, руководитель полетов); – комплекс связи (в том числе радиосвязи с ВС). В состав АС УВД обязательно входит комплекс бесперебойного электропитания, комплекс единого времени на основе приемников системы спутниковой навигации и комплекс документирования информации. Кроме того, в состав АС УВД может входить тренажерный комплекс и информационносправочная подсистема. Объектом управления являются ВС.
Вычислительный комплекс (ВК) является одной из главных составных частей АС УВД. Он представляет собой совокупность технических средств, включающих в себя, как правило, несколько ЭВМ или процессоров, общесистемное базовое и прикладное программное обеспечение. ВК это сложная управляющая система, предназначенная для обработки плановой (FDP) и радиолокационной (координатной) информации (RDP). Основными задачами ВК являются: - сбор, хранение и своевременное распределение плановой информации; - форматный и логический контроль вводимой плановой информации, её анализ, выявление конфликтных ситуаций по планам полётов в критических точках ВП, расчёт временных параметров планов, их автоматическая активизация и отображение в удобной форме; - вторичная и третичная обработка радиолокационной и другой координатной (АЗН) информации; - обнаружение потенциальных конфликтных ситуаций; - отображение координатной (трековой) информации в удобной форме; - приём и выполнение команд диспетчеров от клавиатуры и других органов управления (ДПК, манипулятор «мышь» и т. п.); - подготовка и выдача информации для документирования; - имитация моделей ВО для тренировки диспетчеров. Важнейшим требованием ВК при обработке координатной информации в RDP является его работа в «масштабе реального времени». Любому полёту ВС предшествует составление его плана. Даже если выполняется срочное задание, то вслед за вылетом ВС передаётся план, в котором наряду с другими сведениями о данном рейсе содержится маршрут полёта. Различают предварительное (долгосрочное) планирование, суточное и текущее планирование ВД. Необходимо рассмотреть задачи, решаемые на каждом из этих этапов планирования. Автоматизация планирования ВД должна осуществляться в соответствии с рекомендациями ИКАО, изложенными в европейском аэронавигационном плане. При изучении этой темы необходимо обратить внимание на состав прикладного программного обеспечения вычислительного комплекса АС УВД, принципы построения баз данных, их классификацию, средства управления базами данных и на обеспечение надёжности и резервирования данных, содержащих плановую информацию. Метеорологическая информация вводится в вычислительный комплекс АС УВД от метеорадиолокаторов через цифровой преобразователь и с АРМ синоптика. Метеорологическая информация в АС УВД представляется в двух видах – графическом и буквенно-цифровом. Цифровая обработка радиолокационной информации производится в три этапа: первичная, вторичная и третичная обработка. Первичная обработка РЛИ - это обработка принятого радиолокационного сигнала одним радиолокатором за один контакт с целью (один проход ДН антенны).
Вторичная обработка радиолокационной информации - процесс объединения во времени первичной радиолокационной информации от обзора к обзору. При вторичной обработке завязываются и сопровождаются траектории (треки) ВС.
Третичная обработка радиолокационной информации - процесс объединения радиолокационной информации о целях, наблюдаемых разнесёнными по территории радиолокаторами.
Первичная обработка РЛИ проводится на радиолокационной позиции и решает следующие задачи: - обнаружение радиолокационных сигналов; - измерение координат ВС (азимута и дальности); - декодирование ответных сигналов и дополнительной полётной информации (для ВРЛ); - объединение информации от первичных и вторичных РЛС с единой зоной обзора. Вторичная обработка радиолокационной информации включает следующие этапы: - обнаружение траекторий; - завязка траектории; - сопровождение траектории. Обнаружение траектории цели является начальным этапом обработки радиолокационной информации и заключается в выделении отметок данной цели из всей совокупности поступающих отметок. После появления в процессоре обработки данных одиночной координатной отметки цели производится расчет области (строба), в которой может появиться отметка от этой цели при следующем обзоре. Рассчитываются стробы двух типов:
После вторичного попадания отметки от цели в стартовый строб, по двум координатным меткам вычисляется скорость и направление движения предполагаемой цели, а также прогнозируется (экстраполируется) положение метки на следующий (третий) обзор. Если в строб в третьем обзоре попала метка, то она считается принадлежащей к обнаруженной траектории и происходит её завязка. При завязке траектория движения ВС принимается линейной. Сопровождение заключается в отборе отметок для продолжения траектории и проводится на основе сравнения координат и параметров новых отметок с экстраполированными координатами и характеристиками сопровождаемых траекторий. При автоматическом сопровождении цели необходимо иметь в виду, что радиолокационные измерения производятся с погрешностями, в результате чего зарегистрированные положения цели статистически отклоняются от фактической линии полета. С учетом этого, при расчете положений упреждения, исходными данными являются не фактические координаты предыдущего положения цели, а сглаженные по определенному алгоритму значения. Операция сглаживания необходима для повышения точности прогнозирования ожидаемых координат цели на последующий обзор. Вторичная или межобзорная обработка радиолокационной информации производится в вычислительном комплексе АС УВД, в частности в его части, имеющей обозначение RDP. Целью вторичной обработки является получение информации о траекториях и параметрах движения ВС для УВД. Третичная обработка радиолокационной информации это объединение информации от нескольких разнесенных на местности источников информации наблюдения (радаров). Третичная обработка радиолокационной информации обеспечивает стабильное сопровождение воздушных целей и формирование картины воздушной обстановки путём анализа информации, поступающей от нескольких источников (радаров). При третичной обработке решаются следующие задачи: - объединение отметок от одного ВС, полученных от различных радаров; - формирование измерений по данным от нескольких источников; - построение траектории по объединенным данным. Третичной обработке предшествует пересчет координат отметок от различных источников в единую координатную систему. Результатом третичной обработки являются мультирадарные треки, рассчитанные из реальных треков по специальным алгоритмам. Одним из способов третичной обработки сигналов от нескольких РЛС является мозаичная обработка, при которой зона наблюдения разделяется на отдельные области (ячейки) и радиолокационные данные от ВС обрабатываются в связи с приоритетностью всех РЛС определенных в данной области. Другой способ третичной обработки предусматривает использование информации от всех радаров. При этом результирующая траектория представляет собой комбинацию траекторий от разных радаров, взятых с различными весовыми коэффициентами. Весовые коэффициенты траекторий рассчитываются на основе статистического анализа вероятностных характеристик радаров.
Комплекс отображения информации в АС УВД. В результате цифровой обработки радиолокационная информация на ИВО может быть представлена в трех видах. Это координатная информация в виде синтезированных отметок ВС, формуляров сопровождения с лини
|
|||||||||||||||||||
|
|
Последнее изменение этой страницы: 2021-01-08; просмотров: 331; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.138.33.87 (0.125 с.) |