
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
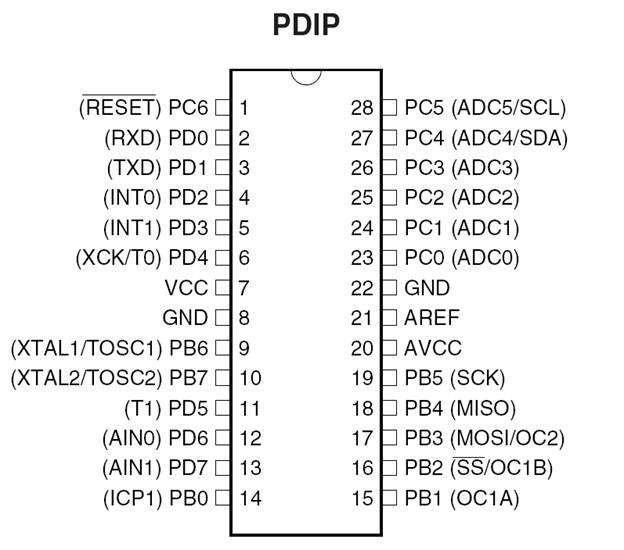
Контроллер ATmega 8 выполнен в 28 выводном DIP корпусеСтр 1 из 5Следующая ⇒
Лабораторная работа №2 Знакомство с устройством и принципами работы микроконтроллера семейства AVRAmega 8 Цель работы: ознакомление с принципами работы таймеров и счетчиков 1.Методические указания по подготовке к работе Содержание работы: Уяснить поставленную задачу, ознакомиться с методами работы с регистрами микроконтроллера, разработать алгоритм работы, разработать программу, позволяющую осуществлять вывод информации с микроконтроллера на LCDиндикатор. 1.1. Основные сведения из теории: Контроллер ATmega 8 выполнен в 28 выводном DIP корпусе
Восьмиразрядный таймер/счётчик с поддержкой режима ШИМ Назначение и особенности
Таймер/счётчик T0 – это универсальный восьмиразрядный счётный модуль с двумя независимыми модулями совпадения и с поддержкой ШИМ (PWM). Он позволяет формировать заданные промежутки времени (для работы в режиме реального времени). А также может служить генератором периодических сигналов. Рассмотрим основные характеристики таймера/счётчика.
Упрощенная блок-схема
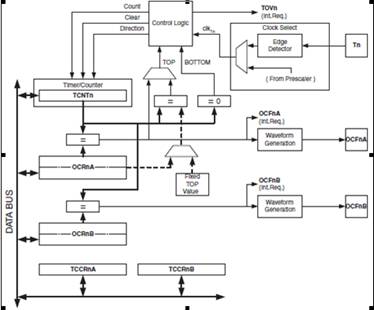
Упрощенная блок-схема восьмиразрядного таймера/счётчика приведена на рис. 9. Доступные для центрального ядра регистры и цепи передачи данных на схеме показаны полужирными линиями.
Рис. 9 - Блок-схема 8-разрядного таймера/счётчика Регистры
Как счётный регистр таймера/счётчика (TCNT0), так и оба регистра совпадения (OCR0A, и OCR0B) представляют собой восьмиразрядные регистры. Наличие запроса на прерывание (на рис.10 он сокращённо обозначен «выз. прерыв.») всегда можно определить по состоянию соответствующее флага прерываний в регистре TIFR. Каждое прерывание может быть индивидуально замаскировано при помощи регистра маски прерываний таймера TIMSK. Регистры TIFR и TIMSK на рис. 9 не показаны. Таймер/счётчик может работать как от внутреннего тактового генератора через предварительный делитель, так и от внешнего тактового сигнала, поступающего на вход T0. Схема выбора источника тактового сигнала пропускает тактовые импульсы выбранного источника на вход таймера/счётчика, и каждый импульс этого сигнала увеличивает (или уменьшает) его значение. Если не выбран ни один из источников тактового сигнала, таймер/счётчик останавливается.
Сигнал на выходе схемы выбора источника тактового сигнала (clkT0) называется сигналом синхронизации таймера. Содержимое регистров OCR0Aи OCR0Bпостоянно сравнивается со значением таймера/счётчика. Результат сравнения может использоваться генератором для генерации сигнала ШИМ или прямоугольных импульсов переменной частоты на одном из выходов OC0Aили OC0B. В момент совпадения в одном из каналов устанавливается соответствующий флаг OCF0Aили OCF0B, который может использоваться для генерации запроса на прерывание по совпадению. Используемые обозначения
При описании счётчиков используются специальные обозначения для всех его важных состояний. Эти обозначения приведены в табл. 1. Обозначения для основных состояний 8-разрядного счётчика
Таблица 1
Модуль счёта
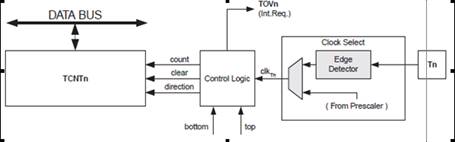
Основой восьмиразрядного таймера/счётчика является программируемый реверсивный счётный модуль. На рис. 10 показана блок-схема счётного модуля и его управляющие сигналы.
Рис. 10 - Блок-схема счётного модуля
Рассмотрим внутренние сигналы: ♦ count – увеличивает или уменьшает содержимое TCNT0 на 1; ♦ direction – выбор между уменьшением и увеличением; ♦ clear – очистка TCNT0 (установка всех битов в ноль); ♦ clkT0 – тактовая частота таймера/счётчика; ♦ top – возникает при достижении TCNT0 максимального значения; ♦ bottom – возникает при достижении TCNT0 минимального значения (нуля). В зависимости от режима работы таймера, каждый импульс тактового сигнала (clkT0) очищает, увеличивает или уменьшает значение счётчика. Сигнал clkT0может быть получен как от внешнего, так и от внутреннего источника тактового сигнала. Это определяется битами выбора тактового сигнала (CS02:0). Когда не выбран ни один источник тактового сигнала (CS02:0 = 0), таймер останавливается.
Центральный процессор может обращаться к значению регистра TCNT0 независимо от того, присутствует ли сигнал clkT0 или нет. Команда записи, поступающая от центрального процессора, имеет приоритет над всеми другими операциями (очистки счётчика или операциями счёта). Режимы работы таймера определяются установкой битов WGM01 и WGM00 регистра TCCR0Aи битом WGM02 регистра TCCR0B. Есть тесная связь между выбранным режимом работы счётчика и частотой сигнала на выходе OC0A. Флаг переполнения таймера/счётчика (TOV0) устанавливается в соответствии с режимом работы, выбранным при помощи битов WGM01:0. Флаг TOV0 может использоваться для генерации прерываний центрального процессора.
Модуль совпадения
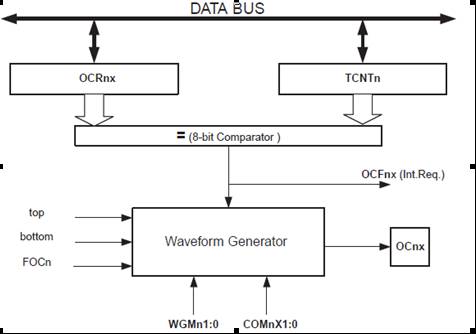
Основа модуля – восьмиразрядный компаратор, который непрерывно сравнивает содержимое регистра TCNT0 с содержимым каждого из двух регистров совпадения (OCR0Aили OCR0B). Каждый раз, когда содержимое TCNT0 оказывается равным содержимому OCR0Aили OCR0B, компаратор вырабатывает сигнал совпадения. Этот сигнал устанавливает соответствующий флаг совпадения (OCF0Aили OCF0B) в следующем тактовом цикле. Если соответствующее прерывание разрешено, установка флага совпадения вызывает прерывание. Флаг совпадения автоматически сбрасывается при запуске процедуры обработки прерывания. Флаг также может быть очищен программно путём записи в него логической единицы. В режиме генератора частот сигнал совпадения используется для генерации выводного сигнала совпадения используется для генерации выводного сигнала в соответствии с выбранным режимом работы, который определяется битами WGM02:0, а также битами выбора режима сравнения (COM0x 1:0). Сигналы max и bottom используются генератором частот в некоторых случаях для получения критических значений в отдельных режимах работы. На рис. 11 показана блок-схема модуля совпадения. На рисунке буква x – это условное обозначение. Для разных модулей совпадения x равно либо A либо B.
Рис. 11 - Блок-схема модуля совпадения Регистры OCR0xимеют двойную буферизацию в любом режиме широтно-импульсной модуляции (ШИМ). В режиме Normal и режиме СТС (Сброс при совпадении) двойная буферизация отключается. Двойная буферизация синхронизирует момент обновления регистра OCR0xс моментом достижения таймером верхнего или нижнего пределов. Синхронизация предотвращает возникновение ассиметричных ШИМ-импульсов, то есть импульсов, длина которых равна нечётному количеству тактов. Таким образом обеспечивается высокое качество сигналов ШИМ. Доступ к регистру OCR0xможет показаться слишком сложным. На самом деле это не так. Если двойная буферизация разрешена, центральный процессор обращается к регистрам OCR0xчерез буфер. Если буферизация отключена, центральный процессор обращается к регистрам OCR0xнепосредственно.
Режимы работы
Режим работы, то есть поведение таймера/счётчика и выхода сигнала совпадения, определяется как режимом работы генератора сигналов (WGM02:0), так и режимом вывода сигнала совпадения (COM0x1:0). Состояние битов, определяющих режим вывода сигнала совпадения, не влияет на последовательность подсчёта, которая определяется только состоянием битов конфигурации генератора сигналов.
Биты COM0x1:0 определяют, должен ли выходной сигнал ШИМ быть инвертирован или нет (инвертированный или не инвертированный ШИМ). Для не-ШИМ-режимов содержимое битов COM0x1:0 определяет, должен ли сигнал на выходе быть установлен в единицу, сброшен в ноль либо переключён в противоположное состояние в момент совпадения.
Режим «Normal»
Режим «Normal» (WGM02:0 = 0) – это самый простой из режимов работы таймера. В этом режиме направление счёта всегда вперёд (содержимое увеличивается), и принудительный сброс счётчика не выполняется. Счётчик просто переполняется, когда достигает максимально для восьми разрядов значения (TOP = 0xFF), а затем перезапускается сначала (0x00). При нормальной работе флаг переполнения таймера/счётчика (TOV0) будет установлен в тот момент, когда TCNT0 станет равно нулю. Флаг TOV0 в этом случае ведёт себя как девятый бит, а затем исключением, что он только устанавливается, но не сбрасывается. Используя прерывание по переполнению таймера, которое автоматически очищает флаг TOV0, можно увеличить коэффициент пересчёта программы путём. Режим Normal не имеет никаких особенностей, на которых стоило бы заострять внимание. Новое значение счётного регистра может быть записано в любой момент времени. Модуль совпадения иногда может использоваться для вызова прерываний. Использование сигнала совпадения для генерации сигналов в режиме Normal не рекомендуется, так как это будет сильно тормозить работу процессора.
Режим FastPWM (быстрый ШИМ)
Микроконтроллер имеет несколько режимов широтно-импульсной модуляции (ШИМ). По-английски это звучит как PulseWidthModulation (PWM).Быстрый ШИМ (fastPWM) выбирается при WGM02:0 = 3 или 7. В этом режиме формируется самый высокочастотный сигнал ШИМ. Быстрый ШИМ отличается от других режимов ШИМ тем, что для формирования сигнала счётчик формирует только возрастную последовательность. То есть изменение значение счётчика имеет вид пилообразного сигнала с односторонним наклоном. Счёт начинается со значения BOTTOM и заканчивается значением TOP. После этого счётчик перезапускается (снова устанавливается значение BOTTOM). Значение TOP равно 0xFF при WGM2:0 = 3. Если же WGM2:0 = 7, значение TOP определяется содержимым регистра OCR0A. В режиме неинвертирующего выхода сигнал совпадения (OC0x) сбрасывается в момент совпадения значений TCNT0 иOCR0xи перехода к BOTTOM. В инвертирующем режиме сигнал на выходе устанавливается в момент совпадения и перехода в BOTTOM. Благодаря тому, что счётчик работает всегда только в одном направлении, частота сигнала в режиме fast PWM может быть в два раза выше, чем в режиме phasecorrect PWM, который использует пилообразный сигнал с двумя наклонами.
Благодаря высокой частоте выходного сигнала режим fast PWM хорошо подходит для создания систем регулировки мощности, для построения выпрямителей и цифро-аналоговых преобразователей. Высокая частота позволяет применять внешние компоненты (катушки, конденсаторы) небольших размеров, и тем самым, уменьшать общую стоимость системы. В режиме fast PWM значение счётчика увеличивается до тех пор, пока не достигнет значения TOP. В следующем цикле тактового сигнала таймера счётчик очищается. Флаг переполнения таймера/счётчика (TOV0) устанавливается каждый раз, когда счётчик достигает значения TOP. Если прерывание разрешено, то вызывается процедура обработки прерывания, которая может быть использована для обновления уровня совпадения. В режиме fast PWM модуль совпадения используется для генерации сигнала ШИМ на выходах OC0x. Установка битов COM0x1:0 = 2 произведёт к генерации на выходе неинвертированного сигнала ШИМ. Для генерации инвертированного сигнала ШИМ необходимо установить COM0x1:0 = 3. При установке битов COM0A1:0 = 1сигнал на выходе AC0A в момент совпадения переключается в противоположное состояние при условии, что бит WGM02 = 1. Эта опция не доступна для выхода OC0B. Фактическое значение OC0x поступит на внешний контакт микросхемы только в том случае, если он будет сконфигурирован как выход. Сигнал ШИМ формируется путём установки (сброса) регистра OC0x в момент совпадения значений OCR0xи TCNT0, и сброса (установки) этого регистра в первом тактовом цикле, после перезагрузки счётчика (изменении его значения с TOP на BOTTOM). Частота сигнала ШИМ на выходе может быть рассчитана при помощи следующего выражения:
Переменная N представляет собой коэффициент предварительного деления (1, 8, 64, 256 или 1024). Отдельно нужно рассмотреть несколько случаев при генерации сигнала ШИМ, когда в регистр OCR0Aзаписывается значение, близкое к предельному. Если в регистре OCR0Aбудет установлено значение, равное BOTTOM, то выходной сигнал будет представлять собой короткий выброс для каждого MAX + 1тактового импульса таймера. Если в регистр OCR0Aзаписать значение MAX, то это приведёт к тому, что на выходе будет постоянно присутствовать либо высокий, либо низкий логический уровень (в зависимости от значения битов COM0A1:0). Частота выходного сигнала в режиме fast PWM (при уровне регулирования 50%) может быть достигнута, если заставить регистр OC0x переключать свой логический уровень при каждом совпадении (COM0x1:0 = 1). Сформированный таким образом сигнал будет иметь максимальную частоту fOC0 = fclk_I/O/2 в том случае, когда в регистре OCR0A записан ноль. Эта особенность позволяет переключать регистр OCR0A таким же образом, как в режиме СТС, но при этом использовать все преимущества двойной буферизации, которая применяется в режиме fast PWM.
Порядок выполнения работы 1. Получить задание у преподавателя 2. Разработать алгоритм 3. Разработать программу в CodeVisionAVR 4. Скомпилировать файл прошивки 5. Спроектировать макетную плату в PROTEUS 6. Загрузить файл (*.hex) в PROTEUS и запустить симуляцию в проекте. Оформление отчета Отчет должен содержать: а) формулировку цели работы, б)схему устройства в) код программы в CodeVisionAVR г)схема проекта в PROTEUS д) Выводы по работе
Список использованной литературы 1) М.Б. Лебедев. CodeVision AVR. Пособие для начинающих. Додэка XXI, 2008. 592 с.
Содержание: 1.Методические указания по подготовке к работе 1.1. Основные сведения из теории: Состав микроконтроллеров Устройство микроконтроллера на примере ATtiny 2313 Гавардская архитектура микроконтроллеров AVR Понятие стека АЛУ – арифметико-логическое устройство X-регистр, Y-регистр и Z-регистр Системная перепрограммируемая Flash-память программ Память данных SRAM Порты ввода-вывода Использование портов для цифрового ввода-вывода Порядок выполнения работы Оформление отчета
Лабораторная работа №2 Знакомство с устройством и принципами работы микроконтроллера семейства AVRAmega 8 Цель работы: ознакомление с принципами работы таймеров и счетчиков 1.Методические указания по подготовке к работе Содержание работы: Уяснить поставленную задачу, ознакомиться с методами работы с регистрами микроконтроллера, разработать алгоритм работы, разработать программу, позволяющую осуществлять вывод информации с микроконтроллера на LCDиндикатор. 1.1. Основные сведения из теории: Контроллер ATmega 8 выполнен в 28 выводном DIP корпусе
|
|||||||||||||||
|
|
Последнее изменение этой страницы: 2021-01-08; просмотров: 131; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.118.9.146 (0.05 с.) |
 .
.


