Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Расчеты для испытания устойчивости при наезде на бордюр или углубление ⇐ ПредыдущаяСтр 5 из 5
Е.1 Общие положения Настоящее приложение дает энергетический метод оценки устойчивости МПРП в ситуациях динамического удара, например в следующих случаях: a) движение МПРП с поднятой стрелой приводит к столкновению во время испытания с наездом на бордюр обочины и проездом впадины (см. 5.1.4.3.2.3), когда МПРП не удается преодолеть эти препятствия; b) МПРП с подъемной стрелой в опущенном положении проваливается в углубление при съезде с бордюрного камня во время испытания устойчивости (см. 5.1.4.3.2.2); c) осуществляется проверка торможения МПРП при номинальном наклоне шасси (см. 5.1.4.3.2.3). Нижеследующий пример ситуации столкновения, упомянутого в перечислении а), см. на рисунках Е.1-Е.3. Кинетическая энергия Ekin для конкретной МПРП:
где m - масса МПРП, кг; v - скорость (0,7 м/с для данного примера). Потенциальная энергия Еpot, необходимая для опрокидывания
где g - ускорение силы тяжести (g = 9,81 м/с). Заключение: Ekin < Epot, т.е. опрокидывания не происходит.
────────────────────────────── а) Линия опрокидывания. ──────────────────────────────
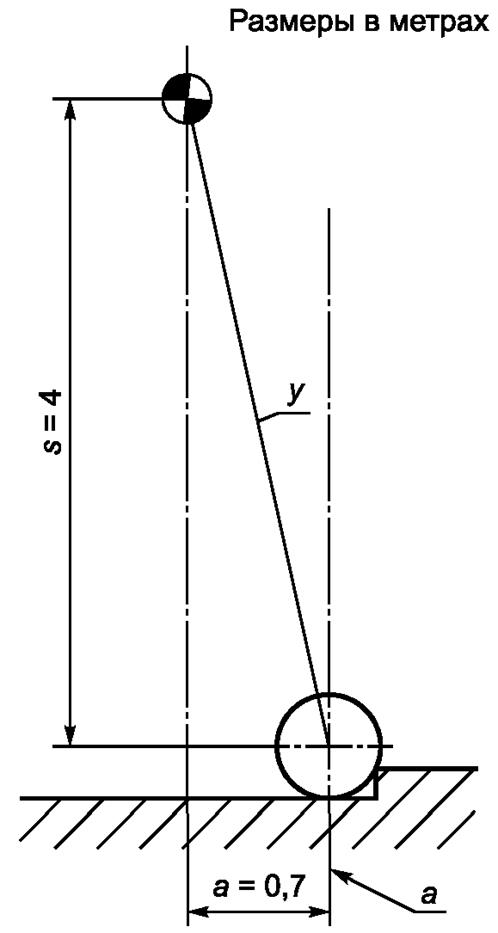
Рисунок Е.3 - Потенциальная энергия
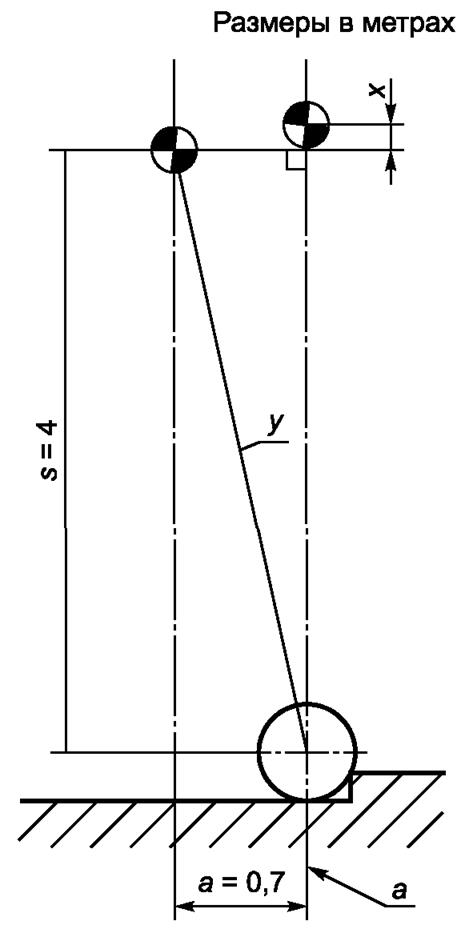
Е.2 Вывод фактора z Фактор z характеризуется в 4.2.2.2.1 и показан на рисунках 2b) и 2с). Фактор z имеет единицы измерения ускорения и дает линейное решение для события нелинейного столкновения. С учетом рисунка Е.4 и предыдущих вычислений получают следующее. В точке неустойчивости кинетическая энергия равна гравитационной потенциальной энергии. Принимают моменты относительно линии опрокидывания: m z = g При Ekin z = a/s Ekin/Epot z = 0,7/4,0 x 0,245/0,6 z = 0,071
────────────────────────────── a) Линия опрокидывания. ──────────────────────────────
Рисунок Е.4 - Фактор z
Приложение F
Руководство по эксплуатации
F.1 Общие положения В приложении представлен минимальный перечень технической информации, который должен содержать, но не ограничиваться только ею, следующую информацию для обеспечения безопасной эксплуатации МПРП. См. также [4] и ГОСТ 33636. F.2 Руководство по эксплуатации F.2.1 В руководстве по эксплуатации следует указать подробности безопасной эксплуатации, включая следующее: a) информацию о характеристиках и описание МПРП, а также наладку МПРП и ее использование по назначению; b) необходимая несущая способность грунта; c) местоположение, назначение и использование средств управления, оборудования для опускания и останова в непредвиденных ситуациях; d) запрет перегрузки рабочей платформы; e) запрет использования в качестве подъемного крана; f) строгое соблюдение национальных правил дорожного движения; g) сохранение свободного пространства вблизи линий электропередачи под напряжением; h) уклонение от соприкосновения с неподвижными (здания и т.д.) и подвижными объектами (автотранспорт, краны и т.д.); i) запрет любого увеличения в досягаемости или рабочей высоте МПРП путем использования дополнительного оборудования (например, лестниц); j) запрет любого дополнения, которое могло бы увеличить ветровую нагрузку на МПРП, например с помощью объявлений (исключения см. в 4.2.2.5); k) окружающие ограничения; l) информацию о вибрациях; m) важные ежедневные проверки состояния безопасности машины (утечки масла, ослабление электрических фитингов/соединений, изношенность шлангов/кабелей, состояние шин/тормозов/аккумуляторов, повреждение от столкновения, пластинки с устаревшими инструкциями, специальные устройства безопасности и т.д.); n) установку съемных ограждений; о) запрет посадки на рабочую платформу и выхода с нее в поднятом положении; р) предохранительные меры для движения с поднятой рабочей платформой; q) в приемлемых случаях требования ответственной организации к оборудованию для предотвращения падения с высоты; r) требования по минимальной дистанции приближения к электрическим линиям и аппаратам под напряжением, как определено в [4] или национальными, или другими более жесткими правилами.
F.2.2 В руководстве по эксплуатации следует предоставить информацию по транспортированию, обращению и хранению, включая следующее: a) любые меры предосторожности в отношении крепления частей МПРП для транспортирования между местами использования; b) метод погрузки на другие транспортные средства/суда, обеспечивающие перевозку между местами использования, включая точки подъема, массу, центр тяжести и т.д. для целей подъема; c) меры предосторожности, которые надо принимать перед хранением снаружи или внутри помещения; d) проверки, которые надо проводить до использования после периодов хранения, внешнего воздействия экстремальных условий окружающей среды, например жар, холод, влажность, пыль и т.д. F.2.3 В руководстве по эксплуатации следует предусмотреть информацию по вводу в промышленное использование, включая следующее: a) необходимо проводить испытания перед размещением МПРП на рынке сбыта (см. 5.3); b) необходимо проверять энергоснабжение, гидравлические масла, смазки и т.д. при первом использовании, после долгих периодов хранения или изменений в окружающих условиях (зима, лето, новое географическое местоположение и т.д.). F.2.4 В руководстве по эксплуатации следует указать рекомендованные ответственной организацией периодические освидетельствования или испытания, включая следующее: a) периодические освидетельствования или испытания надо проводить в соответствии с эксплуатационными условиями и частотой использования; b) содержание периодических освидетельствований и испытаний, т.е.: - визуальный осмотр конструкции, обращая особое внимание на коррозию и другое повреждение несущих частей и сварных швов, - обследование механических, гидравлических, пневматических и электрических систем, обращая особое внимание на устройства обеспечения безопасности, - испытание, доказывающее эффективность тормозов и/или устройств защиты от перегрузки, и - функциональные испытания (см. 5.1.4.6); с) информацию о том, что частота и степень периодических обследований и испытаний могут также зависеть от национальных правил.
Примечание - Общепринято, что нет необходимости осуществлять разборку частей на периодических обследованиях, если нет сомнений в их надежности и безопасности. Снятие крышек, открывание смотровых отверстий и приведение МПРП в транспортное положение не считаются разборкой.
F.2.5 В руководстве по эксплуатации следует предоставить информацию по техническому обслуживанию подготовленным персоналом, включая следующее: a) техническую информацию о МПРП с электрическими/гидравлическими/пневматическими принципиальными схемами; b) расходуемые продукты, наличие которых требуется периодически/часто проверять (смазки, уровень масла гидравлических систем, состояние аккумуляторов); c) свойства безопасности, подлежащие проверке через заданные интервалы, и оборудование аварийного останова; d) меры, принимаемые для обеспечения безопасности во время технического обслуживания; e) проверка на любое опасное ухудшение (коррозия, появление трещин, истирание и т.д.); f) критерии метода и повторяемость обследования и ремонта/замены частей, в том числе:
- для систем приводов, использующих стальные канаты, единичные канаты согласно 4.5.2.1.2 или первые и вторые канаты в системах согласно перечислениям а), b) или с) 4.5.2.1.3 следует заменять при обнаружении пределов износа, указанных в [17], в любом одном из упомянутых выше канатов, - для систем цепного привода, единичные цепи согласно 4.5.3.1.2 или пары цепей согласно перечислениям а) или b) 4.5.3.1.3 следует заменять при обнаружении пределов износа в любой одной из упомянутых выше цепей, и - другие компоненты в приемлемом случае (например, ожидаемый срок службы); g) важность применения для замены только утвержденных ответственной организацией запасных частей, особенно компонентов, имеющих отношение к обеспечению безопасности; h) необходимость одобрения ответственной организацией любой переделки, которая может влиять на устойчивость, прочность или рабочую характеристику; i) части, требующие регулировку, включая подробности наладки; j) любые необходимые испытания/проверки после технического обслуживания для гарантии безопасного рабочего режима.
Приложение G
Дополнительные требования к дистанционным системам управления
G.1 Общие положения Беспроводные средства управления должны быть сконструированы согласно [18], с дополнениями, данными в настоящем приложении. Передатчик не должен функционировать при действующих средствах предотвращения несанкционированного использования (4.3.16). G.2 Ограничение управления G.2.1 О включении передатчика должна быть соответствующая индикация без инициирования какого-либо движения МПРП. G.2.2 Приемник должен давать выходные рабочие команды в систему управления только в случае приема фреймов, содержащих правильные адреса и команды. G.2.3 Контактор МПРП должен получать электрическое питание (т.е. приведен в состояние "вкл."), с получением по меньшей мере одного правильного фрейма без каких-либо рабочих команд, но содержащий стартовую команду. G.2.4 Чтобы избежать случайных перемещений после любой ситуации, вызвавшей остановку МПРП (например, сбой энергоснабжения, замена аккумулятора или состояние потери сигнала), система должна выдавать рабочие команды, имеющие результатом любое перемещение МПРП только после возвращения машинистом средств управления в положение "выкл." на подходящий период времени, т.е. до получения по меньшей мере одного фрейма без каких-либо рабочих команд.
G.2.5 В случае отключения электрического питания на переключателе МПРП все выходные сигналы рабочих команд от приемника на движения МПРП должны пропадать. G.3 Останов G.3.1 Часть беспроводной системы управления, которая должна выполнять функцию останова, является частью системы управления МПРП, имеющей отношение к обеспечению безопасности. G.3.2 Система управления должна инициировать останов всех движений МПРП при отсутствии корректного приема действительного фрейма в пределах 0,5 с. G.3.3 Если текущий контроль, осуществляемый приемником, определяет, что состояние системы управления не соответствует состоянию выходных сигналов приемника, то останов, заданный в G.3.2, должен также отключить электрическое питание на переключатель МПРП. Если текущий контроль, осуществляемый приемником, определяет, что состояние системы управления соответствует состоянию выходных сигналов приемника, то отключение электрического питания переключателя МПРП может быть задержано максимум на 5 мин. G.3.4 Если функции аварийного останова категории 0 согласно требованию [18] создают любой дополнительный риск, то функция останова может быть категории 1. G.4 Обмен данными, передаваемыми последовательно G.4.1 Фрейм должен передаваться неоднократно в течение операции. G.4.2 Система должна обеспечивать надежность передачи на расстояние Хэмминга общего числа битов в фрейме, деленного на 20, и не меньше 4, или она должна использовать другие средства, которые обеспечивают равный уровень надежности, так что вероятность прохождения ошибочного фрейма составляет менее 10-8. G.5 Использование более одного поста, с которого машинист осуществляет управление G.5.1 Переход управления от одного передатчика к другому не должен быть возможным до выключения первого передатчика преднамеренным действием, специально предусмотренным для такой цели. G.5.2 Должно быть предоставлено средство для обеспечения возможности работы нескольких пар передатчик/приемник в определенном передающем диапазоне без создания нежелательных помех друг другу. G.5.3 Средство, предоставленное в G.5.2, должно быть защищено от случайного или непреднамеренного изменения. G.6 Посты управления для машинистов, которые получают питание от аккумуляторов После предупреждения и периода времени, которое требуется согласно [18] (когда напряжение аккумулятора становится настолько низким, что надежная передача не может быть гарантирована), передатчик должен автоматически блокироваться (т.е. приемник останавливает все движения МПРП и отключает электрическое питание переключателя МПРП). G.7 Приемник Приемник должен выдерживать вибрации на испытании Fh в случайной широкой полосе частот в соответствии с ГОСТ 30630.1.9. G.8 Предупреждения В случае, когда можно ожидать появление людей вблизи МПРП или его части (например, при движении или повороте МПРП) и существует риск захвата людей, наезда и т.д., должны быть дополнительные предупреждения.
МПРП должна иметь маркировку в месте доступа на платформу с объяснением, что МПРП оборудована беспроводной системой управления, а также иметь непрерывное наглядное предупреждение, когда беспроводная система управления занята, либо автоматическое акустическое и/или наглядное предупреждение до начала движения МПРП. G.9 Информация для использования G.9.1 Инструкции производителя должны включать в себя монтажную информацию для гарантии, что при использовании беспроводной системы управления она не будет создавать помехи другим системам или ей не будут мешать другие системы в месте эксплуатации. G.9.2 Производитель должен обеспечить реальную задержку для функции останова, заданной по G.3.2.
Приложение H
Перечень
Опасности определены при помощи процедуры оценки риска и представлены в виде таблицы Н.1. Опасности, которые не определены пунктами настоящего стандарта, но могут иметь место, обозначены как НУ (не указанные).
Таблица Н.1 - Перечень потенциальных опасностей
Приложение ДА
Сведения
Таблица ДА.1
Приложение ДБ
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2021-01-14; просмотров: 98; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.17.203.68 (0.057 с.) |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 ,
, ,
,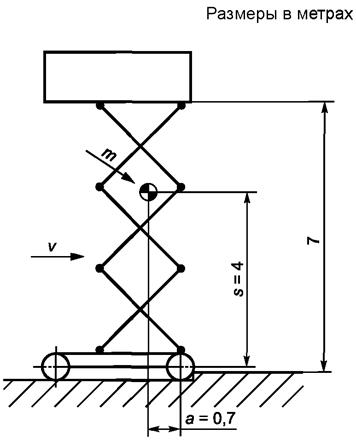 Рисунок Е.1 - МПРП перед препятствием
Рисунок Е.1 - МПРП перед препятствием
 _____________
а) Линия опрокидывания.
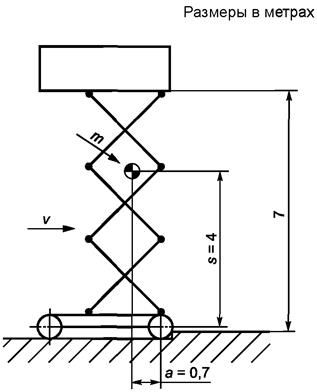
Рисунок Е.2 - Наезд МПРП на препятствие
_____________
а) Линия опрокидывания.
Рисунок Е.2 - Наезд МПРП на препятствие
 g
g  Epot m
Epot m