Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Расчеты металлоконструкций и устойчивостиСтр 1 из 5Следующая ⇒
4.2.1 Расчеты и номинальная нагрузка Производитель МПРП должен выполнить: a) для расчетов металлоконструкций количественно определить отдельные нагрузки и силы в тех положениях, направлениях и комбинациях, для которых в рассматриваемых элементах возникают наиболее неблагоприятные напряжения; b) для расчетов устойчивости определить различные положения МПРП и комбинации нагрузок и сил, совместно создающих условия минимальной устойчивости. Номинальная нагрузка, эквивалентная массе m, должна быть определена из следующей формулы:
где
n - допустимое число людей на рабочей платформе. Минимальная расчетная нагрузка МПРП должна быть 120 кг. 4.2.2 Нагрузки и силы, действующие на конструкцию МПРП 4.2.2.1 Общие положения Во внимание должны быть приняты следующие нагрузки и силы: a) силы, вызванные номинальной нагрузкой и массой элементов металлоконструкций (см. 4.2.2.2); b) ветровые нагрузки (см. 4.2.2.3); c) силы, создаваемые при воздействии вручную (см. 4.2.2.4); d) нагрузки и силы, возникающие в особых условиях эксплуатации (см. 4.2.2.5). 4.2.2.2 Силы, вызванные номинальной нагрузкой и массой элементов металлоконструкций 4.2.2.2.1 Гравитационные и динамические силы Гравитационные силы, вызванные номинальной нагрузкой и собственной массой элементов металлоконструкции, должны учитываться как действующие вертикально вниз на центры масс элементов. Эти силы вычисляют путем умножения масс элементов на 1,0 g.
Примечание - Коэффициент д представляет ускорение силы тяжести (9,81 м/с2).
Динамические силы, вызванные ускорением и замедлением собственных масс элементов металлоконструкции, должны быть представлены силами, действующими по линии перемещения центров масс элементов. Динамические силы, возникающие при выдвижении или втягивании выдвижной части конструкции, должны быть вычислены путем умножения собственных масс элементов металлоконструкции на 0,1 g (см. приложение В). Динамические силы, возникающие при передвижении МПРП типов 2 и 3, должны быть вычислены путем умножения структурных масс на фактор z. Фактор z представляет собой ускорение/замедление МПРП при передвижении и его угловое ускорение/замедление при движении через наземные препятствия, например такие, которые происходят во время испытания у бордюра (см. 5.1.4.3.2.2). Фактор z должен быть минимум 0,1, если он не определен путем вычисления или испытания (см. пример вычисления z в приложении Е).
4.2.2.2.2 Распределение нагрузки на рабочей платформе В расчетах предполагается следующее: - масса каждого человека действует на рабочую платформу как точечная нагрузка, приложенная на расстоянии по горизонтали 0,1 м от верхней внутренней кромки перил. Расстояние между точечными нагрузками должно быть 0,5 м (см. рисунок 1);
1 - край рабочей платформы
Рисунок 1 - Номинальная нагрузка (масса человека)
- масса материалов, инструмента и оборудования действует как нагрузка (не более 3 кН/м), равномерно распределенная на 25 % площади пола рабочей платформы. Если суммарная нагрузка превышает 3 кН/м, то эту нагрузку распределяют на площадь пола более 25 %, выдерживающую указанное давление; - все эти нагрузки расположены таким образом, что создают наиболее неблагоприятное нагружение. 4.2.2.3 Ветровые нагрузки 4.2.2.3.1 МПРП, эксплуатируемые вне помещений Все МПРП, используемые на открытом воздухе, считаются подверженными воздействию ветра под давлением 100 Н/м2, что эквивалентно скорости ветра 12,5 м/с (6 баллов по шкале Бофорта согласно приложению А). Предполагается, что силы, возникающие из-за воздействия ветра, действуют в горизонтальном направлении, приложены к центру площади нахождения элементов МПРП, людей, материалов, инструмента и оборудования на рабочей платформе и должны учитываться при определении динамических нагрузок.
Примечание - Эти положения не распространяются на МПРП, предназначенные для эксплуатации только в закрытых помещениях.
4.2.2.3.2 Коэффициенты формы, применяемые для поверхностей, подверженных ветровым нагрузкам К поверхностям, подверженным действию ветра, в расчетах следует применять коэффициенты формы: a) L-, U-, Т-, I-сечения: 1,6; b) коробчатые сечения: 1,4; c) большие плоские поверхности: 1,2; d) круглые сечения в зависимости от размера: 0,8/1,2;
e) для людей, непосредственно подверженных действию ветра: 1,0. Если требуется дополнительная информация, особенно касающаяся экранированных участков конструкции, то следует руководствоваться [5]. О защите людей от ветра см. 4.2.2.3.3. 4.2.2.3.3 Площадь поверхности человека (людей), находящегося на рабочей платформе под действием ветровых нагрузок Полная площадь одного человека, воспринимающая ветровое давление, принимается равной 0,7 м2 (средняя ширина 0,4 м, умноженная на рост 1,75 м) при расположении центра площади на высоте 1,0 м от пола платформы. Подверженная действию ветра площадь человека, стоящего на платформе за перфорированным (неперфорированным) участком ограждения высотой 1,1 м, принимается равной 0,35 м2. При этом центр площади расположен на высоте 1,45 м от пола платформы. Число людей, непосредственно подверженных действию ветра, рассчитывается через нормируемую длину стороны рабочей платформы, приходящуюся на одного человека, следующим образом: a) значение длины стороны рабочей платформы, подверженной воздействию ветра, округляют до ближайшего значения, кратного 0,5 м, и делят на 0,5 м; или b) если полученное расчетное число людей меньше максимально допустимого числа людей, для данной платформы применяют коэффициент формы 1,0. Если полученное расчетное число людей больше максимально допустимого для данной платформы, для дополнительного числа людей следует применять коэффициент формы 0,6. 4.2.2.3.4 Сила ветра, действующего на инструменты, материалы и оборудование Силу ветра, действующего на инструмент, материалы и оборудование на рабочей платформе, в расчетах принимают как 0,03mе 4.2.2.4 Силы, создаваемые при воздействии вручную Минимальное значение силы, возникающей при воздействии вручную, принимают равным 200 Н для МПРП, предназначенных для подъема одного человека, и 400 Н для подъема более чем одного человека. В расчетах принимают, что сила приложена на высоте 1,1 м от пола платформы. Любое большее разрешенное значение силы должно быть указано изготовителем. 4.2.2.5 Нагрузки и силы, возникающие в особых условиях эксплуатации Нагрузки и силы, возникающие в особых условиях эксплуатации, создаются следующими факторами: - перемещение предметов вне рабочей платформы; - воздействие силы ветра на большие предметы, переносимые по рабочей платформе (см. приложение А); - воздействие силы со стороны грузоподъемной лебедки или устройства для работы с материалами. Если пользователь заинтересован в применении особых способов ведения работ и/или особых условий эксплуатации, то нагрузки и силы, возникающие при этом, следует соответствующим образом учитывать в виде поправки к номинальной нагрузке, нагрузке от элементов металлоконструкции, ветровой нагрузке и/или силам, возникающим при воздействии вручную.
Примечание - Для особых условий эксплуатации производитель должен дать соответствующую информацию в руководстве по эксплуатации.
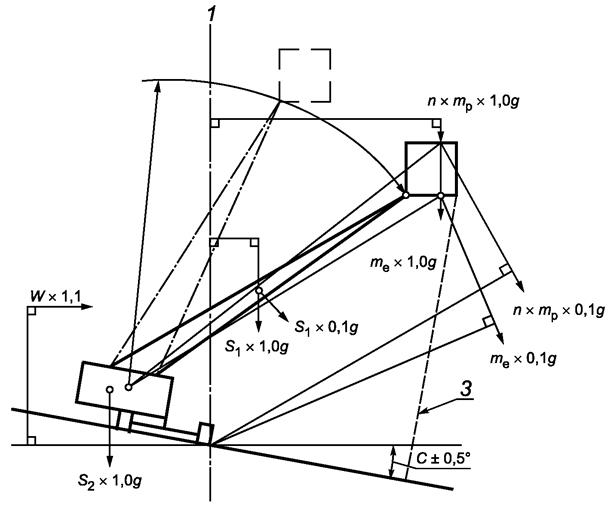
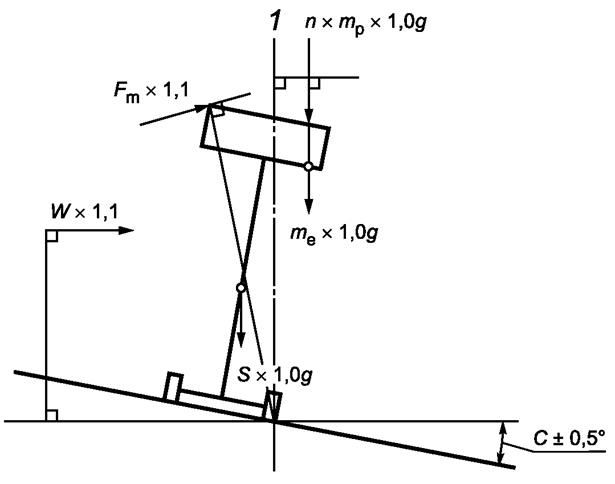
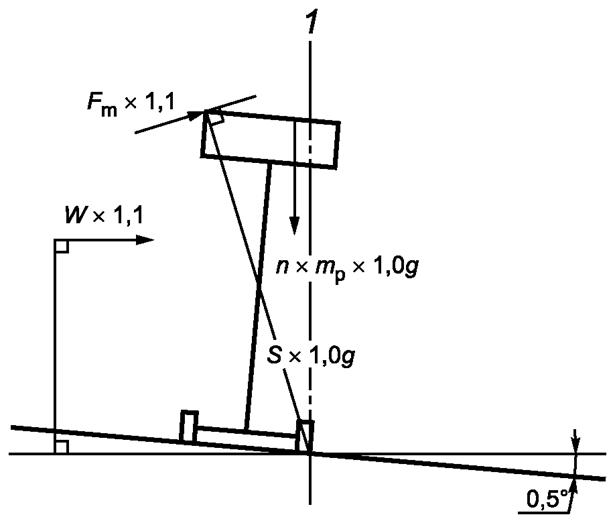
4.2.3 Расчеты устойчивости 4.2.3.1 Силы, создаваемые массой металлоконструкции и номинальной нагрузкой Значения сил, создаваемых массой металлоконструкции и номинальной нагрузкой, создающие момент опрокидывания или восстанавливающий момент, следует умножать на коэффициент 1,0 и при расчетах принимать действующими вертикально вниз. При работе поворотной части подъемника значения этих сил следует умножать на коэффициент 0,1 и принимать действующими в направлении движения, увеличивающем при этом опрокидывающий момент (см. приложение В).
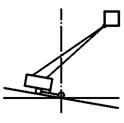
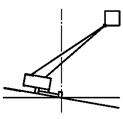
Производители могут применять коэффициент меньше 0,1 в том случае, если они могут подтвердить измерениями влияние ускорений и замедлений. Если при эксплуатации возникают более резкие ускорения/замедления, следует пользоваться коэффициентом большим, чем 0,1. При передвижениях МПРП типов 2 и 3, осуществляемых в положении для перемещения, коэффициент 0,1 следует заменять на коэффициент, представляющий силы, возникающие при ускорении и замедлении. Этот коэффициент определяют с помощью расчетов или испытаний (пример расчета испытаний на бордюрном камне см. в приложении С). Примеры действия сил см. на рисунке 2. 4.2.3.2 Силы ветра Значения сил ветра следует умножать на коэффициент 1,1. Считается, что они действуют в горизонтальном направлении. 4.2.3.3 Силы при воздействии вручную Значения сил, прикладываемых людьми к рабочей платформе руками, следует умножать на коэффициент 1,1. Принимается, что они действуют в направлении, создающем наибольший опрокидывающий момент [см. примеры на рисунках 2а) - 2d)]. 4.2.3.4 Нагрузки и силы, возникающие в особых условиях эксплуатации Нагрузки и силы, возникающие в особых условиях эксплуатации, следует учитывать в расчетах, определенных производителем. 4.2.3.5 Расчет опрокидывающего и восстанавливающего моментов Максимальный опрокидывающий и соответствующий ему восстанавливающий моменты следует рассчитывать для наиболее неблагоприятных линий опрокидывания на расчетном уклоне, зависящем от конструкции МПРП. Линии опрокидывания и допустимый угол установки МПРП в наиболее неблагоприятных условиях применения определяют расчетом опорного контура или принимают согласно [5]. Опорный контур также должен быть установлен в соответствии с [5]. Для сплошных или заполненных пенистой резиной шин линии опрокидывания могут приниматься проходящими на 1/4 ширины пятна контакта шины с поверхностью, считая от наружной границы пятна контакта. Расчеты следует проводить для МПРП, находящегося в наиболее неблагоприятном положении на максимально допустимом уклоне поверхности плюс 0,5° с учетом неточности установки МПРП. Все нагрузки и силы, которые могут действовать одновременно, следует принимать в расчетах в наиболее неблагоприятных комбинациях.
См. примеры в таблице 1 и на рисунках 2а) - 2d). При расчетах допускается использовать графические методы.
Таблица 1 - Примеры направлений и комбинаций нагрузки и силы для расчетов устойчивости [см. также рисунки 2а) - 2d)]
В каждом случае вычисленный восстанавливающий момент должен быть больше, чем вычисленный опрокидывающий момент. В расчетах следует учитывать: a) допускаемые отклонения при изготовлении деталей и узлов; b) зазоры в соединении элементов подъемного оборудования; c) упругие деформации; d) повреждение любой из шин в случае, если МПРП в рабочем положении опирается на пневматические шины, а также в случае, если МПРП не оснащается стабилизаторами, чтобы исключить зависимость устойчивости от шин, или системой непосредственного мониторинга шин, которая предупреждает машиниста при падении давления по меньшей мере на 25 % по сравнению с заданным давлением накачки; е) эксплуатационная характеристика (точность) систем, чувствительных к нагрузке, к опрокидывающему моменту и управлению положением. На результаты расчета могут оказывать влияние: - пики, вызванные кратковременными динамическими воздействиями; - гистерезис; - наклон МПРП; - температура окружающей среды; - различное расположение и распределение нагрузки на рабочей платформе (см. 4.2.2.2.2). Определение упругих деформаций проводят экспериментальным путем или с помощью расчетов. 4.2.3.5.1 Динамическая устойчивость Необходимо испытывать МПРП, чтобы установить, что он остается устойчивым при испытании тормозов (5.1.4.3.2.3), при наезде на бордюр или углубление (5.1.4.3.2.2). 4.2.4 Расчеты конструкции 4.2.4.1 Общие положения Расчеты металлоконструкции должны подчиняться законам и принципам прикладной механики и сопротивления материалов. При использовании специальных формул должны быть указаны источники, из которых они заимствованы, если эти источники являются общедоступными. При отсутствии источника формулы могут быть выведены из исходных положений, обоснованность которых может быть проверена.
Требования, изложенные в 4.2.2, должны быть учтены для определения нагрузок и сил, учитываемых в расчетах. Использование национального стандарта не должно вносить изменения в эти требования, за исключением случаев, когда требования национального стандарта являются более жесткими. Упругие деформации не основных конструкций следует принимать во внимание. Расчетное напряжение не должно превышать допустимых значений. Расчетное значение запасов прочности должно быть не ниже требуемого. При проектировании конструктивных элементов МПРП, систем привода, органов управления и устройств безопасности необходимо руководствоваться требованиями настоящего стандарта, изложенными в 4.3-4.10.
а)
b)
Рисунок 2, лист 1
c)
d)
Рисунок 2, лист 2
e)
f)
Рисунок 2, лист 3
g)
h)
1 - линия опрокидывания; 2 - направление движения; 3 - ограничение вылета; С - максимальный наклон шасси
Рисунок 2 - Примеры максимальной опрокидывающей нагрузки и комбинации силового момента
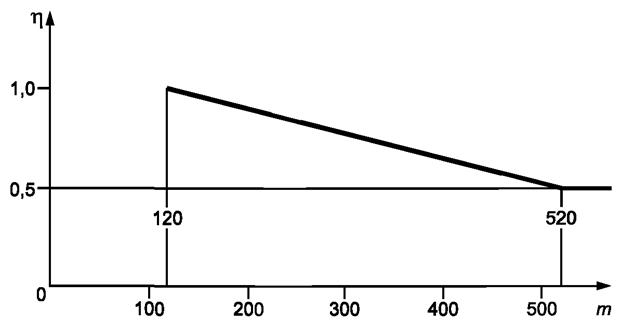
4.2.4.2 Анализ конструктивного решения 4.2.4.2.1 Общий анализ механического напряжения Общий анализ напряжений является методом защиты проектируемого подъемника от аварий из-за податливости металла или образования трещин. Анализ должен быть выполнен для всех элементов и соединений, воспринимающих нагрузку. Для определения соответствия подъемника указанным требованиям может быть использовано моделирование методом конечных элементов (МКЭ). Модель МКЭ должна быть точно определена и включать в себя объяснение области загрузки, типов нагрузки, ограничение областей и типов ограничений. Напряжения, возникающие при проведении статического испытания (см. 5.1.4.3.1) и испытания на перегрузку (см. 5.1.4.4), не должны превышать 90 % предела текучести материалов. Возникающие в жестких конструктивных элементах МПРП расчетные механические напряжения не должны превышать 20 % минимального предела прочности материала. Допустимые расчетные напряжения могут быть уменьшены на основании выполненных расчетов. 4.2.4.2.2 Анализ упругой устойчивости Анализ упругой устойчивости является методом защиты от аварий при потере упругой устойчивости (например, продольных изгибов, деформаций). Этот анализ должен быть проведен для всех элементов, воспринимающих сжимающие нагрузки. 4.2.4.2.3 Анализ усталостных напряжений Анализ усталостных напряжений является методом защиты от аварий из-за усталости металла, обусловленной колебаниями напряжений. Этот анализ должен быть проведен для всех элементов и соединений, воспринимающих нагрузку, которые являются опасными с точки зрения усталости, включая конструктивные элементы, уровень колебания напряжений и число циклов изменения напряжений. Число циклов изменения напряжений может быть кратным числу циклов нагрузки. Так как число колебаний напряжений при перемещении не может быть вычислено с определенной степенью точности, напряжения в транспортном положении в элементах, подверженных вибрациям, при перемещении должны быть достаточно низкими, для того чтобы обеспечить фактически бесконечный ресурс до разрушения от усталости (см. также 4.4.6 и 4.6.15). Число циклов нагрузки для МПРП обычно принимают: a) легкий прерывистый режим (например, 10 лет, 40 недель в год, 20 ч в неделю, 5 циклов нагрузки в час): 4 b) тяжелый режим (например, 10 лет, 50 недель в год, 40 ч в неделю, 5 циклов нагрузки в час): 105 циклов. При определении комбинаций нагрузок допускается, чтобы номинальная нагрузка была снижена с учетом спектрального коэффициента нагрузки в соответствии с рисунком 3; при этом ветровые нагрузки не учитывают.
Примечание - Информация по конструктивному решению систем привода стальным канатом приведена в приложении D.
m - масса, кг;
Рисунок 3 - Спектральный коэффициент нагрузки
4.2.4.2.4 Влияния концентрации напряжений и окружающей температуры Анализ должен принимать во внимание влияние концентраторов напряжений и температуры окружающей среды. 4.2.5 Контроль Контроль требований в 4.2 должен быть выполнен с помощью проверки конструкции, визуального осмотра, статических испытаний и испытаний на перегрузку.
Требования к базовому шасси и выносным опорам
4.3.1 Автоматическое устройство безопасности На МПРП типа 1 с приводным двигателем и МПРП с управляемыми перемещениями с земли должны быть установлены автоматические защитные устройства (в соответствии с 4.11), отключающие любое непреднамеренное передвижение подъемника по рабочей площадке, когда рабочая платформа находится не в транспортном положении. Блокирующее устройство (например, запирающийся переключатель) должно исключать возможность несанкционированного использования МПРП. Контроль - проверка конструкции и функциональные испытания. 4.3.2 Наклон базового шасси Каждый МПРП должен иметь устройство для индикации того, находится ли наклон базового шасси в разрешенных пределах. Это устройство должно быть автоматическим, в соответствии с 4.11 оно должно быть защищено от повреждения и случайного изменения его установки. Регулировка устройства должна осуществляться только с использованием инструмента и должна быть обеспечена возможность ограничения доступа путем опломбирования. Данное устройство должно предотвращать подъем из опущенного положения или между разными положениями, когда наклон шасси выходит за пределы угла, заданного производителем для определенного положения. Применение отвесных (стрелочных) указателей наклона категорически запрещается. Для МПРП типа 1 данное устройство может быть заменено спиртовым уровнем. Для МПРП, имеющих выносные опоры с силовым приводом, указатель наклона базового шасси должен быть отчетливо виден с каждого места управления выносными опорами. Для МПРП типа 2 при передвижении с рабочей платформой в поднятом положении достижение крайних пределов угла наклона должно сопровождаться звуковым сигналом, слышимым в рабочей платформе. Для МПРП типа 3 при движении из опущенного положения и по достижении пределов, заданных производителем, данное устройство должно предотвращать МПРП от продолжения движения, а для МПРП группы А должно быть запрещено дальнейшее возвышение. Если движение прерывается вследствие превышения предела наклона шасси, то движение допускается при условии, что устойчивость поддерживается или улучшается. Звуковое предупреждение должно быть подано, когда шасси достигло пределов наклона. Контроль - функциональное испытание. 4.3.3 Стопорные устройства Все стопорные устройства должны быть застрахованы от непреднамеренного рассоединения сопряженных деталей/узлов (например, подпружиненным штифтом) и потери (например, цепью). Контроль - визуальный осмотр. 4.3.4 Рычаги управления Рычаги управления МПРП, управляемых рядом идущим машинистом, и тяги буксирного устройства должны быть надежно прикреплены к базовому шасси. Контроль - визуальный осмотр и испытание. 4.3.5 Рычаги управления в вертикальной позиции Если рычаги управления МПРП и тяги в нерабочем состоянии поднимаются в вертикальное положение, должно быть предусмотрено автоматическое устройство для удержания рычагов в этом положении. Для многоосного базового шасси минимальное расстояние между полностью опущенными рычагами управления или тягами и землей должно быть не менее 120 мм. Контроль - визуальный осмотр, испытание и измерение. 4.3.6 Выносные опоры МПРП должны быть оборудованы выносными опорами, предназначенными для выравнивания положения базового шасси. Усилие поднятия (выдвижения) опор или их частей вручную не должно превышать 200 Н. При большем усилии опоры должны иметь гидравлический или иной привод. Выносные опоры должны быть спроектированы таким образом, чтобы обеспечивать плотное прилегание опорной пяты к поверхности установки, имеющей отклонение от горизонтали на угол до 10°. Контроль - визуальный осмотр и измерение. 4.3.7 Допустимые положения рабочей платформы Каждая МПРП должна быть оснащена устройством безопасности в соответствии с 4.11, которое исключает возможность работы рабочей платформы при нахождении вне разрешенных положений, а также если выносные опоры не установлены согласно руководству по эксплуатации. Подъемники, не имеющие выносных опор, должны быть оборудованы устройством, исключающим действие упругих подвесок. МПРП, которые проектируются для работы без выносных опор для ограниченного диапазона работ, должны быть оборудованы устройствами безопасности в соответствии с 4.11, которые исключают возможность работы вне той зоны, где допускается работа без выносных опор. Контроль - проверка конструкции и функциональное испытание. 4.3.8 Предотвращение движения выносных опор с приводом от источников энергии МПРП, имеющие выносные опоры или систему выравнивания, работающие от источника энергии, должны быть оснащены устройством безопасности согласно 4.11. Оно должно предотвращать их перемещение, если подъемное оборудование и рабочая платформа не находятся в транспортном положении или в пределах разрешенной зоны, определенной в 4.3.7. Если подъемное оборудование и рабочая платформа находятся в пределах разрешенной зоны, управление выносными опорами не должно создавать неустойчивого положения МПРП. Контроль - проверка конструкции и функциональное испытание. 4.3.9 Выносные опоры, управляемые вручную Выносные опоры, управляемые вручную, должны быть сконструированы с учетом предотвращения непреднамеренного движения. Контроль - проверка конструкции и функциональное испытание. 4.3.10 Выдвижение и втягивание выносных опор Выдвижение и втягивание выносных опор должны быть ограничены механическими упорами, которыми могут быть гидравлические цилиндры, предназначенные для выполнения этой функции. Для предотвращения неконтролируемого выдвижения выносных опор в транспортном положении должны быть предусмотрены механические устройства. Выносные опоры должны быть зафиксированы в транспортном положении двумя отдельными запорными устройствами для каждой из опор, по крайней мере одно из которых должно работать автоматически, например гравитационный блокирующий штифт плюс защелка. Приводные стабилизаторы, удовлетворяющие требованиям 4.3.8 и 4.10, отвечают этому условию транспортирования. Требование предотвращения неконтролируемого движения предъявляют также к МПРП с несъемными выносными опорами, которые увеличивают ширину или длину опорного контура МПРП, и ко всем МПРП, монтируемым на транспортных средствах. Контроль - проверка конструкции и функциональное испытание. 4.3.11 Указатель положения выносных опор МПРП, установленных на транспортных средствах МПРП, установленные на транспортных средствах (самоходных и прицепных), должны быть оборудованы указателем, видимым с места расположения органов управления передвижением из кабины, сигнализирующим, что все части выносных опор, поворотной части, лестниц для доступа и рабочей платформы МПРП находятся в транспортных положениях. Контроль - проверка конструкции и функциональное испытание. 4.3.12 Обзор работы МПРП с поста управления Машинист, находящийся на посту управления, должен иметь хороший обзор всех движений выносных опор МПРП. Это особенно важно в том случае, когда выносные опоры приводятся в действие с помощью источника энергии. Органы управления перемещением, находящиеся на базовом шасси, управление которыми проводится с уровня земли, должны быть расположены таким образом, чтобы машинист стоял на расстоянии по меньшей мере 1 м от вертикальной касательной к колесам или гусеницам. Контроль - визуальный осмотр. 4.3.13 МПРП, управляемые полностью вручную Требования 4.3.7 не применяются к МПРП, которые управляются полностью вручную и высота подъема пола рабочей платформы которых относительно земли не превышает 5 м (см. 6.3.15). Для таких МПРП также не является обязательным соблюдение всех требований по безопасности, которые не могут быть выполнены без подвода энергии. Контроль - проверка конструкции и визуальный осмотр. 4.3.14 Системы блокировки или контроля шарнирно-сочлененных секций МПРП, оснащенные одной или несколькими шарнирно-сочлененными секциями в системах, которые блокируют или контролируют шарнирно-сочлененные секции для обеспечения устойчивости, должны удовлетворять следующим требованиям: а) для МПРП типа 1 предохранительное устройство (см. 4.11) должно препятствовать выдвижению телескопических секций до тех пор, пока не будут заблокированы или взяты под контроль шарнирно-сочлененные секции; b) на МПРП типов 2 и 3, которые имеют средство блокировки или контроля за положением шарнирно-сочлененных секций, предохранительные устройства согласно 4.11 должны быть объединены; в тех случаях, когда в качестве блокирующих или регулирующих устройств используются гидравлические цилиндры, они должны соответствовать требованиям 4.10. 4.3.15 Тормоза МПРП МПРП должны быть оборудованы тормозами (минимально на двух колесах одной и той же оси), которые включаются в работу автоматически при отключении подачи энергии или выходе из строя, а также должны останавливать и удерживать МПРП в неподвижном положении согласно 4.3.18. Включение тормозов и удержание их во включенном положении не должно зависеть только от подводимого гидравлического или пневматического давления или электрической энергии. Контроль - проверка конструкции и функциональное испытание. 4.3.16 Несанкционированное использование МПРП должны быть оснащены устройством предотвращения несанкционированного использования.
Пример - ключ с блокировкой.
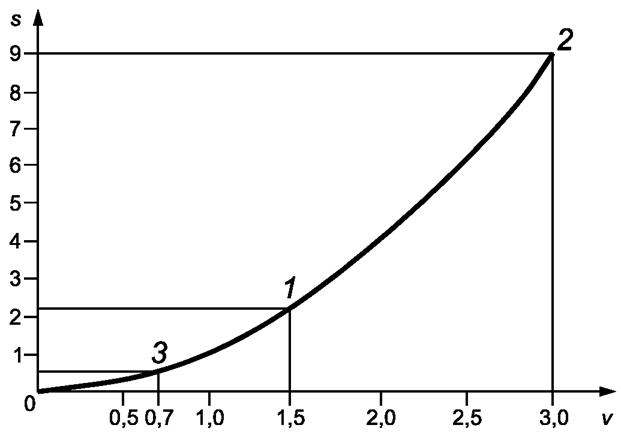
Контроль - функциональное испытание. 4.3.17 Максимальные скорости передвижения при нахождении МПРП не в транспортном положении Скорости движения МПРП типов 2 и 3, когда они находятся не в транспортном положении, не должны превышать следующих значений: a) 1,5 м/с для МПРП, установленных на транспортных средствах, когда управление передвижением МПРП осуществляется из кабины; b) 3,0 м/с для МПРП, установленных на железнодорожном подвижном составе; c) 0,7 м/с для всех остальных МПРП типов 2 и 3. Контроль - проверка конструкции и функциональное испытание. 4.3.18 Тормозной путь МПРП, передвигающиеся с максимальными скоростями, перечисленными в 4.3.17, на максимально допускаемом изготовителем уклоне, должны останавливаться так быстро, чтобы тормозной путь не превышал расстояний, приведенных на рисунке 4. Эти значения получены на основе среднего замедления 0,5 м/с2 и не включают в себя время реакции машиниста.
Примечание - Минимальный тормозной путь зависит от коэффициента z (см.4.2.2.2.1).
Контроль - проверка конструкции и функциональное испытание.
1 - для МПРП, на шасси транспортного средства; 2 - для МПРП, на рельсовом ходу; 3 - для всех других МПРП; v - скорость, м/с; s - дистанция остановки, м
Рисунок 4 - Максимальный тормозной путь для МПРП типов 2 и 3
4.3.19 Максимальная скорость передвижения МПРП с управлением с земли Максимальная скорость передвижения МПРП, управляемого с земли или с выносного пульта, когда рабочая платформа находится в транспортном положении, не должна превышать 1,7 м/с. Контроль - функциональное испытание. 4.3.20 Ограждения вокруг поста управления На МПРП должно быть предусмотрено ограждение для защиты рабочего персонала, находящегося на посту управления или рядом с МПРП на земле или в других местах доступа, от тепловых или механических опасных факторов. Открывание или снятие этого ограждения должно быть возможно только с применением специального инструмента, хранимого в закрытых и запираемых кабинах или отсеках, или с помощью инструмента или ключей, поставляемых с МПРП. Контроль - визуальный осмотр и проверка конструкции. 4.3.21 Выхлопы двигателя транспортных средств Выхлопы от работы двигателя внутреннего сгорания должны быть направлены в сторону, противоположную посту управления. Вредные (загрязняющие) вещества выхлопных газов не должны превышать норм, установленных в [7]. Контроль - визуальный осмотр и измерение. 4.3.22 Горловины для заправки рабочей жидкости (РЖ) Заправочные горловины газовых и жидкостных резервуаров для не огнестойких жидкостей должны быть расположены таким образом, чтобы не возникало возгорание в результате протекания РЖ на горячие части машины (например, на выпускной трубопровод). Контроль - проверка конструкции и визуальный осмотр. 4.3.23 Крепление аккумуляторных батарей Аккумуляторные батареи и резервуары всех МПРП должны быть закреплены таким образом, чтобы не происходило их смещения. Должны быть приняты меры к тому, чтобы в случае опрокидывания МПРП комплект аккумуляторных батарей оставался закрепленным во избежание риска травмирования машиниста, которое может произойти из-за смещения аккумуляторных батарей или выплескивания электролита. В ящике, отсеке или крышке отсека для батарей должны быть предусмотрены соответствующие вентиляционные отверстия, с тем чтобы в местах нахождения машиниста не происходило накопление опасной концентрации газов.
Примечание - Расположение вентиляционных отверстий, обеспечивающих свободный выход образующихся газов, обычно является достаточным, если соблюдается условие: поперечное сечение отверстий в квадратных миллиметрах (мм2), должно быть равно произведению, получаемому умножением 5-часовой номинальной емкости батарей в ампер-часах (А/ч) на половину числа элементов аккумулятора. Этот результат расчета, однако, не учитывает условий зарядки.
Контроль - визуальный осмотр. 4.3.24 Сход с рельсового пути 4.3.24.1 Общие положения Следующие требования относятся к предотвращению схода с рельсов соответствующих МПРП во время работы и при движении по рельсовому пути в рабочем положении. При движении МПРП по рельсовому пути в рабочем положении их колеса должны быть нагружены в достаточной степени, чтобы избежать схода с рельсов. 4.3.24.2 Защищенность от схода с рельсов МПРП, с конструкциями, которые являются подвижными и влияют на возможность схода с рельсов, должны иметь достаточную защищенность, чтобы оставаться на рельсах. a) Для МПРП, имеющих одну и ту же подвеску в стационарном режиме и режиме передвижения, защищенность от схода с рельсов в рабочих условиях считается обеспеченной, если одновременно: - подвеска не блокируется, или для МПРП с трехопорной подвеской по меньшей мере одна из трех опор может поворачиваться свободно, или МПРП (включая колесные пары) является достаточно гибким, чтобы компенсировать изгиб пути, и - нет жесткой связи между несколькими соединенными частями МПРП, которые могли бы препятствовать свободе поворота или свободному перемещению в вертикальном и поперечном направлениях в пределах разрешенной свободы перемещения; b) Для МПРП, имеющих различную конструкцию подвески в стационарном режиме и режиме передвижения, защищенность от схода с рельсов доказывают путем статических испытаний для рабочих конфигураций согласно 4.3.24.3. Ни в стационарном режиме, ни в движении по рельсовому пути не должно быть возможности изменения рабочих конфигураций, если это может вызывать момент нагрузки, достигающий или превышающий 90 % номинального значения, в новой конфигурации. Если одно из этих условий не соблюдается, то защищенность от схода с рельсов должна быть доказана путем стационарных испытаний в соответствии с 4.3.24.3. 4.3.24.3 Расчетные случаи нагружения для предотвращения схода с рельсов во время движения
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2021-01-14; просмотров: 115; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.190.217.134 (0.274 с.) |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 ,
, - равна 80 кг (масса взрослого человека);
- равна 80 кг (масса взрослого человека); - равна 40 кг или более (масса инструментов и материалов);
- равна 40 кг или более (масса инструментов и материалов);
 g и считают направленной горизонтально на высоте 0,5 м от пола платформы.
g и считают направленной горизонтально на высоте 0,5 м от пола платформы.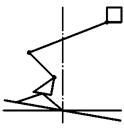










 - спектральный коэффициент нагрузки
- спектральный коэффициент нагрузки