
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Синхронный компенсатор реактивной мощности
Синхронный компенсатор – синхронный двигатель не выполняющий механической работы. Его назначение — компенсация реактивной мощности. Если нагрузить его механической работой, он не сможет компенсировать реактивную составляющую в нужном диапазоне. У него два режима работы: · Перевозбужденный; · Недовозбужденный;
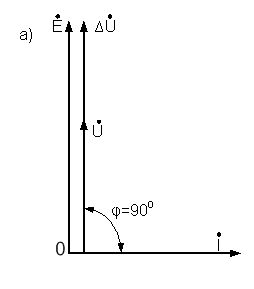
Перевозбужденный режим. Так как компенсатор работает на холостом ходу, то согласно теории ток идеального холостого хода должен быть равен нулю, хотя на самом деле это не так. Выполняется равенство
Рис. а) векторная диаграмма работы в перевозбужденном режиме Недовозбужденный режим. Если уменьшить Iв, в двигателе образуется ЭДС, соответственно
Можно сделать вывод, что синхронный компенсатор работает в двух режимах:компенсации и потребления реактивной составляющей. Это значит что он может не только отдавать но и потреблять, что позволяет поддерживать баланс мощности в цепи. Он снабжается автоматической системой управления возбуждением и в автоматическом режиме регулирует cosφ цепи. Также обладает большой инерционностью, что не позволяет ему быстро реагировать на изменение параметров цепи. При установке его в сеть с резко-переменной нагрузкой нужно максимально оптимизировать настройки регуляторов САУ, чтоб машина не пошла в разнос, так как это чревато аварийными отключением подстанции из-за бросков тока в сеть. Строятся на мощность до Sн = 100 000 кВА. Имеют явнополюсную конструкцию с 2р= 6 или 8 — тихоходные. Компенсаторы большой мощности делаются с водородным охлаждением. Для асинхронного пуска снабжаются пусковыми обмотками в полюсных наконечниках или делают их с массивными полюсами. Пускаться они могут как прямым пуском, так и с помощью реакторов. Иногда используют гонный асинхронный двигатель для разгона машины до подсинхронной скорости. Наиболее часто имеют напряжение питания статора 6 кВ, 10 кВ и садятся на соответствующие линии ГПП.
Для возбуждения синхронного компенсатора чаще всего используют тиристорный преобразователь. Он прост в управлении, обладает малой инерционностью, дешев, по сравнению с другими устройствами, не требует постоянного обслуживания и быстро ремонтируем. Современные возбудители оборудованы микропроцессорной системой управления, которые могут в автоматическом режиме вычислять реактивную мощность и регулировать возбуждение машины, тем самым поддерживая баланс мощности. Ниже приведена функциональная схема системы автоматического регулирования (САУ): Также ранее применялись, а кое-где и до сих пор используются, электромашинное возбуждение. Как правило, работает с очень малой чувствительностью и очень большой инерционностью по отношению к цепи. Дорог в обслуживании и эксплуатации. При выходе из строя долго находится в ремонте. Вывод: синхронный компенсатор является обратимым устройством. Он дорог, занимает много места, а также вызывает шум и иногда вибрации. Эксплуатация его не дешевая, а в случае выхода из строя вращающихся элементов требует длительного ремонта. В сравнении с современными средствами компенсации реактивной мощности является устаревшим.
Проблема компенсации реактивной мощности (КРМ) вызвана высокой загрузкой элементов систем распределения электрической энергии (ЭЭ) потоками реактивной мощности (РМ) вследствие значительного её потребления из сетей. [1] В сетях напряжением 6–10 кВ технологические потери достигают около 8–12 % от отпущенной в сеть электроэнергии. Потери электроэнергии зависят от параметров электрической схемы, а также от конструкции сетей и режимов нагрузки. По данным произведенных расчетов для реальных сетей 6–10 кВ, потери электроэнергии зависят от передаваемой потребителям величины реактивной мощности. Например, при изменении коэффициента реактивной мощности (tgφ) от 0,5 до 0,8 потери электроэнергии увеличиваются примерно на 20 %. По произведенному анализу показаний счетчиков активной и реактивной мощности установлено, что на шинах 6–10 кВ источника питания коэффициент реактивной мощности в процессе эксплуатации изменяется и достигает значения 0,77–0,85, из-за чего потери электроэнергии достигают существенных значений. Наиболее эффективным способом снижения потерь электрической энергии в сетях 6–10 кВ является компенсация реактивной мощности. [2] Помимо изменения потерь электроэнергии и tgφ, посредством генерации реактивной мощности регулируется величина напряжения у потребителя по формуле: (1) где: UЦП — напряжение центра питания; РН и QН — активная и реактивная мощность нагрузки потребителя; RЭ и XЭ — эквивалентное активное и индуктивное сопротивление между центром питания и потребителем. Из приведенной формулы видно, что можно влиять на напряжение у потребителя, изменяя реактивную мощность QН, например, регулируя ее с помощью батареи статических конденсаторов. Существует три вида компенсации: Индивидуальная компенсация применяется при большой единичной мощности электроприемников. В этом случае компенсирующие устройства устанавливаются у электроприемников и присоединяются к зажимам электроприемников. Однако подобная компенсация хорошо подходит лишь для постоянной нагрузки, то есть в тех случаях, где РМ каждой из нагрузок меняется незначительно с течением времени. Групповая компенсация применяется для случая компенсации нескольких расположенных рядом и включаемых одновременно индуктивных нагрузок, подключенных к одному распределительному устройству. Устройства компенсации реактивной мощности устанавливаются в узлах нагрузки. Централизованная компенсации используется в системах, имеющих большое количество потребителей (нагрузок) с большим разбросом суточного коэффициента мощности, то есть для переменных нагрузок. В системах такого типа индивидуальная компенсация не используется, так как резко возрастает стоимость (из-за большого количества конденсаторов) и возникает большая вероятность перекомпенсации. Устройства компенсации реактивной мощности устанавливаются в центре питания. Рис. 1 Виды компенсации Рассмотрим основные типы компенсирующих устройств: Батареи статических конденсаторов (БСК); Фильтро-компенсирующие устройства (ФКУ); Синхронные компенсаторы; Синхронные двигатели (СД). БСК состоит из групп силовых конденсаторов, путем параллельно — последовательного соединения их в звезду или треугольник в зависимости от режима работы нейтрали. Рис. 2 Принципиальные схемы батарей конденсаторов: а — соединение конденсаторов по схеме треугольник, б — соединение конденсаторов по схеме звезда При соединении конденсаторов звездой реактивная мощность батареи: (2) При соединении конденсаторов треугольником реактивная мощность батареи: (3) Из приведенных формул видно, что существенным недостатком БСК является квадратичная зависимость генерируемой реактивной мощности от напряжения, что может являться причиной лавины напряжения. Батареи конденсаторов бывают регулируемые (управляемые) и нерегулируемые. В нерегулируемых БСК число конденсаторов неизменно, а величина реактивной мощности зависит только от величины напряжения. При выборе БСК, суммарная мощность нерегулируемых батарей конденсаторов не должна превышать наименьшей реактивной нагрузки сети, иначе переток реактивной мощности в режиме минимума нагрузок может быть направлен в систему. В регулируемых батареях конденсаторов в зависимости от режима автоматически или вручную изменяется число включенных конденсаторов. При этом изменяется емкость БСК и мощность, выдаваемая в сеть. БСК очень чувствительны к высшим гармоникам, которые значительно снижают ее электрическую прочность. Поэтому были созданы специальные фильтро-компенсирующие устройства, которые могли работать в сетях с высшими гармониками. Конструктивно ФКУ это БСК с использованием специальных фильтров. В режиме перевозбуждения синхронные двигатели генерируют реактивную мощность, а в режиме недовозбуждения — потребляют реактивную мощность, что является их главным достоинством. Но, по сравнению с БСК, СД имеют более сложную конструкцию и систему включения. Обычно СД участвуют в технологическом процессе предприятии и для компенсации реактивной мощности их специально приобретать не нужно. Существует специальная конструкция синхронного двигателя, когда он не несет активной нагрузки, а используется только для выработки реактивной мощности, такое устройство получило название синхронный компенсатор. Если СД уже установлены на промышленном предприятии по условиям технологии, их следует в первую очередь полностью использовать для КРМ. Поэтому при необходимости выполнения КРМ на напряжение 6–10 кВ следует рассматривать возможность получения дополнительной реактивной мощности от СД, если их коэффициент загрузки КСД <1 Минимальную величину реактивной мощности, которая соответствует условию устойчивой работы СД, определяют по формуле: (4) где Рном.СД — номинальная мощность двигателя; tgфном — номинальный коэффициент реактивной мощности. Если номинальная активная мощность СД равна или больше указанной в табл. 1, экономически целесообразно использовать полностью располагаемую реактивную мощность СД, определяемую по формуле: (5) где αм — коэффициент допустимой перегрузки СД, зависящий, от его загрузки по активной мощности (определяется по номограмме рис. 6.2); Qном.СД — номинальная реактивная мощность СД.
Сравнение БСК сСД Сравнительные характеристики БСК СД Срок службы 8–10 лет 15–20 лет Система включения Простая Сложная Потери активной мощности на выработку 1 квар реактивной мощности 0,003–0,005 кВт [4] 0,013–0,015 кВт [5] Конструкция Простая (без вращающихся частей) Более сложная Регулирование РМ Ступенчатое Плавное (определяется плавностью изменения тока возбуждения) Может только генерировать РМ Может генерировать и потреблять РМ Чувствительность к высшим гармоникам Высокая чувствительность Менее чувствительны Зависимость генерации РМ от напряжения Квадратичная зависимость Не зависит от напряжения Из приведенной выше информации видно, что у каждого из основных типов компенсирующих устройств есть достоинства и недостатки, поэтому выбор типа такого устройства будет зависеть от мощности и распределения реактивной нагрузки. В случае, когда на предприятии установлены синхронные двигатели, то целесообразно в первую очередь использовать их для компенсации реактивной мощности, если же их будет недостаточно, то только тогда устанавливают дополнительные компенсирующие устройства. Устанавливать маломощные СД лишь для компенсации реактивной мощности экономически невыгодно, поэтому в таких случаях рекомендуется применять БСК
Сравнительные характеристики БСК СД
на выработку 1 квар реактивной мощности 0,003–0,005 кВт; 0,013–0,015 кВт Конструкция Простая(без вращающихся частей) Более сложная Регулирование РМ Ступенчатое Плавное (определяется плавностью изменения тока возбуж Зависимость генерации РМ от напряжения Квадратичная зависимость Не зависит от напряжения В случае, когда на предприятии установлены синхронные двигатели, то целесообразно в первую очередь использовать их для компенсации реактивной мощности, если же их будет недостаточно, то только тогда устанавливают дополнительные компенсирующие устройства. Устанавливать маломощные СД лишь для компенсации реактивной мощности экономически невыгодно, поэтому в таких случаях рекомендуется применять БСК.
2. Отклонение напряжения электропитания. Отклонение напряжения - отличие фактического напряжения в установившемся режиме работы системы электроснабжения от его номинального значения. Отклонение напряжения в той или иной точке сети происходит под воздействием медленного изменения нагрузки в соответствии с её графиком. ГОСТом установлены следующие значения этого показателя: - для сетей, напряжением до 1 кВ: нормальное
- для сетей, напряжением 6-20-35 кВ: значение показателя определяется по специальным методикам. Причины выхода показателя за пределы норм К ним можно отнести следующие:
|
|||||||||
|
|
Последнее изменение этой страницы: 2020-11-23; просмотров: 737; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.218.209.8 (0.015 с.) |
 . Если увеличить ток возбуждения (Iв) больше нуля Iв ≠ 0, то в двигателе образуется ЭДС и соответственно
. Если увеличить ток возбуждения (Iв) больше нуля Iв ≠ 0, то в двигателе образуется ЭДС и соответственно  — машина выходит из электрического равновесия и возникает ток
— машина выходит из электрического равновесия и возникает ток  , который будет отставать от ∆
, который будет отставать от ∆  ,
,  ,
, 
 — следствием
— следствием 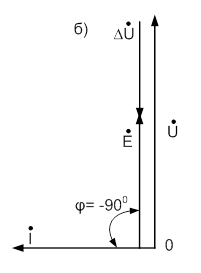 Рис. б) векторная диаграмма работы в недовозбужденном режиме
Рис. б) векторная диаграмма работы в недовозбужденном режиме 5 %; максимальное
5 %; максимальное 


