Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Выбор системы ЭЦ и ее общая характеристика
Федеральное агентство железнодорожного транспорта и ОАО «Российские железные дороги» в своих распоряжениях и решениях обязывают при проектировании объектов нового строительства, реконструкции и техническом перевооружении существующих устройств, применять релейно-процессорные и микропроцессорные централизации стрелок и светофоров. Во исполнении этих решений институтом ГТСС по указанию ОАО «РЖД» №1247/1612 от 01.11.05 г. были разработаны новые нормы технологического проектирования систем ЭЦ. По этим нормам предлагается ряд решений по проектированию систем ЭЦ, в частности для станций с числом стрелок до 60. Для таких станций проектируется микропроцессорная централизация типа Ebilock-950 по типовым материалам для проектирования 410207 «МПЦ Ebilock-950». Альбомы с первого по четвертый вместе с микропроцессорной автоблокировкой системы АБТЦ-Е. Также можно проектировать либо релейно-процессорную централизацию, либо микропроцессорную централизацию типа ЭЦ-ЕМ. Для проектируемой станции К рассмотрим только микропроцессорную централизацию Ebilock-950. Эта система одна из первых была внедрена и одобрена для работы на Российских железных дорогах. Впервые эта система была внедрена еще в июне 1999 г. в опытную эксплуатацию на станции Калашниково Октябрьской дороги. Через год приемочная комиссия приняла опытный образец системы в постоянную эксплуатацию и рекомендовала МПЦ Ebilосk-950 для применения на Российских железных дорогах. В состав МПЦ входят (рисунок 1.1): аппаратура управления и контроля (АРМ ДСП, АРМ ШН, АРМ ПТО, АРМ МУ); центральная обрабатывающая система (центральный процессор ЦП); объектные контроллеры (ОК) и концентраторы связи (КС); напольное оборудование ЭЦ (объекты управления и контроля); устройства электропитания (ЭПУ). МПЦ может быть как с централизованным, так и с децентрализованным расположением оборудования. В МПЦ с централизованным расположением аппаратура непосредственного управления напольными устройствами (ОК) располагается на центральном посту, а в МПЦ с децентрализованным расположением - в модулях контейнерного типа (МОК), установленных в горловинах станции. Для проектируемой станции выбираем централизованное расположение оборудования.
Один комплект центрального процессора может управлять объектами станции с 30 - 60 стрелками. Если необходимо централизовать станцию с большим количеством стрелок, то есть возможность расширить систему путём подключения к центральному компьютеру ещё одного или более компьютеров. При этом ёмкость системы характеризуется следующими параметрами: максимальное количество петель связи - 12; максимальное количество концентраторов в каждой петле связи - 15; максимальное количество ОК, подключаемых к концентратору - 8; максимальное количество ОК на петлю связи - 32; общее количество объектных контроллеров, подключаемых к одному комплекту Ebilock-950, не может превышать 64.
Рисунок 1.1 - Структурная схема МПЦ Ebilock-950
1.3 Однониточный план станции
Схематический план станции является первоначальным документом, на основе которого осуществляем проектирование устройств автоматики и телемеханики. Схематический план путевого развития станции с осигнализованием и указанием ординат объектов показан в приложении А. На станции 4 станционных пути, по которым возможно передвижение в обоих направлениях, 2 подъездных пути, 1 тупик. Маршруты сквозного пропуска поездов предусматриваем по сигналу Н по IП на IУП и по сигналу Ч по IIП на IIУП. Маршруты безостановочного пропуска на IУП - по сигналу Н по II, 3 путям, по сигналу Нд по I,II путям; на IIУП - по сигналу Ч по I, 4 путям, по сигналу Чд по I,II путям. Для кодирования маршрутов сквозного пропуска I и II пути оборудуем устройствами автоматической локомотивной сигнализацией непрерывного типа (АЛСН). Для кодирования маршрутов приёма и отправления поездов в чётном и нечётном направлениях II и 3-ий приемоотправочные пути оборудуем устройствами АЛСН. У входных сигналов с литерами Ч, Чд, Н, Нд на участках 2АП, 1БП, 1АП и 2БП, устанавливаем аппаратуру системы автоматического управления тормозами централизованную (САУТ-Ц). На схематическом плане показываем: пост ЭЦ, изолирующие стыки рельсовых цепей, светофоры, релейные шкафы, переезд, а также другие объекты и данные, необходимость нанесения которых диктуется более полной постановкой задачи по проектированию.
Расстановка поездных и маневровых сигналов. Места установки и порядок нумерации станционных светофоров регламентируется нормалями. Станцию со стороны перегонов ограждаем мачтовыми входными светофорами, имеющими литеры Ч и Н в соответствии с направлением прибывающих поездов. Дополнительные входные светофоры Нд и Чд, предназначенные для приема поездов следующих по неправильному пути, устанавливаем на расстоянии 303 м. от начала остряков первой противошерстной стрелки. Выходные светофоры устанавливаем с учетом специализации станционных путей. С главных предусматриваем их мачтовыми, а с боковых - карликовыми. В случае, когда выходной светофор совмещен с маневровым, на общем носителе добавляем лунно-белый огонь. На однониточном плане имеют литеры: НI, НII, Н3, Н4, ЧI, ЧII, Ч3, Ч4. Маневровые светофоры устанавливаем карликовыми. По своему эксплуатационному назначению подразделяются на следующие группы: разрешающие движение со станционных путей в горловину; - разрешающие движение из тупиков; - светофоры с участков перекрытия за входным светофором. Специализация и нумерация путей. На плане проектируемой станции К все пути обезличены, то есть прием и отправление поездов может осуществляться в обоих направлениях. Рядом с наименованием путей проставляем их полезные длины, которые определяем от соответствующего выходного светофора до предельного столбика противошерстной стрелки (изостыка пошерстной стрелки) в противоположной горловине. Оборудование стрелок электроприводами. Стрелки на однониточном плане показываем в нормальном (плюсовом) положении. Нумерацию стрелок осуществляем четными цифрами со стороны прибытия четных поездов, нечетными - со стороны прибытия нечетных в порядке возрастания, начиная от границы станции по направлению к пассажирскому зданию. Стрелкам съездов присваиваем последовательную пару цифр. Марка крестовины стрелки и тип рельса: по главным путям - 1/11, Р65; по боковым и прочим - 1/9, Р65.
1.4 Маршрутизация передвижений и таблица зависимостей
Все передвижения на станции предусматриваем маршрутизированными. Маршрутизированными называются передвижения, производимые по разрешающему показанию светофоров с соблюдением безопасности движения поездов. Маршрутизацию необходимых маневровых и поездных передвижений производим на основании специализации путей и технологического процесса работы станции. Таблицы зависимостей приведены в приложении Б. Различают маршруты приема и отправления поездов, сквозного их пропуска по станции, передачи из парка в парк и маневровые. Маршрут называется основным, если он позволяет выполнить поездные или маневровые передвижения от начала до конца маршрута по кратчайшему расстоянию, с наибольшей скоростью и наименьшим количеством враждебных маршрутов. Вариантные маршруты имеют одинаковые с основным начало и конец, однако их трасса отличается от основного маршрута положением стрелок. Вариантные маршруты задаются при нажатии трех и более кнопок. Требования по безопасности движения поездов взяты из [2] и сводятся к следующему: при неустановленном маршруте стрелки должны быть свободны для перевода, а сигнальные приборы - находится в запрещающем положении;
открытие сигнала возможно только при готовом маршруте и свободном пути следования; при открытом сигнале должна быть исключена возможность перевода стрелки, входящей в маршрут. Освобождение её для перевода должно происходить только после фактического проследования по ней поезда. Следовательно, органы и объекты управления на станциях находятся в определенных зависимостях друг от друга, которые выявляются в каждом конкретном случае при проектировании устройств централизации и излагаются в таблице зависимостей.
1.5 Двухниточный план станции
Двухниточный план станции приведен в приложении В. Он создается на стадии проектирования станции и является основным документом по оборудованию станции рельсовыми цепями и размещению путевого оборудования электрической централизации. За основу для построения двухниточного плана берем однониточный план станции. Составление двухниточного плана выполняем в следующем порядке: ) Вычерчиваем путевое развитие станции. ) Переносим с однониточного плана все изолирующие стыки, добавляем дополнительные изостыки и устанавливаем перекидные соединители. ) Осуществляем разгонку частот. ) Устанавливаем ДТ и аппаратуру РЦ. ) Производим нумерацию секций. ) Проектируем канализацию обратного тягового тока и отсосы на ТП. ) Расставляем приводы, светофоры. Рассмотрим эти пункты подробнее. На первом этапе вычерчиваем план станции в двухлинейном представлении в соответствии со стандартами. После этого переносим с однониточного плана изолирующие стыки. На однониточном плане приведены не все изостыки, в частности там не указаны изолирующие стыки, устанавливаемые на стрелках для снятия КЗ через крестовину. При расстановке этих стыков учитываем тот факт, что на главных путях необходимо все изостыки ставить на ответвлении, чтобы не снижать надежность действия АЛС (передачу кодов на локомотив по РЦ). В разветвленных РЦ для обтекания сигнальным током ответвлений применяем двойные медные перекидные (стрелочные) соединители. РЦ защищаем от взаимного влияния при замыкании ИС между ними. Так как мы применяем ТРЦ, то данную защиту обеспечиваем чередованием в смежных РЦ несущих и модулирующих частот. ТРЦ, работающие на одной несущей и одной модулирующей частоте, по возможности разделяем не менее чем тремя парами ИС. Поскольку с ростом частоты затухание сигнала возрастает, стремимся применять в более длинных ТРЦ меньшие несущие частоты. Так как приемо-отправочные пути обладают большой протяженностью, в середине ТРЦ этих путей устанавливаем путевые генераторы, а по краям путевые приемники.
Все РЦ проектируем двухниточными. На этом этапе расставляем дроссель-трансформаторы для пропуска тягового тока и указываем, где будут релейные и питающие концы у ТРЦ. Дроссель-трансформаторы устанавливаем по концам рельсовых цепей, при этом учитываем, что с каждого изолированного участка должно быть не менее двух выходов для тягового тока (больше двух тоже нежелательно - увеличение аппаратуры). В тупике ДТ не устанавливаем. Средние точки ДТ соседних путей у входных светофоров со стороны ТП объединяем. В ТРЦ количество ДТ может быть любым, в отличие от фазочувствительных РЦ. ИС съездов главных путей станции на двухпутных линиях оборудуем схемой контроля схода (КЗ) ИС - КСС. Данная схема исключает возможность восприятия чужого кода АЛС при параллельном движении поездов в случае схода ИС на съезде. Стрелочные, бесстрелочные и приемоотправочные пути нумеруем на двухниточном плане между рельсами пути. Приемоотправочные пути нумеруем также, как на однониточном плане. Номер стрелочного участка состоит из номеров стрелок входящих в участок (номеров крайних стрелок, если их три) и букв «СП» (например: 2-8СП, 4-6СП, 10СП). Бесстрелочные участки после входных светофоров нумеруем в нечетной горловине - «НП» и «НДП», в четной горловине - «ЧП» и «ЧДП». Бесстрелочные участки в горловине обозначаем номерами стрелок, между которыми заключен участок. Также предусматриваем аппаратуру кодирования АЛС, причем направление кодирования показываем буквой «к». В горловинах станций и между приемоотправочными путями у нас образовались замкнутые контуры из РЦ. По условиям выполнения контрольного режима работы РЦ для исключения обходных цепей сигнального тока по междроссельным и междупутным перемычкам и другим РЦ длина такого контура должна быть не менее четырехкратной максимальной длины РЦ, входящей в контур, т.е. должно выполняться условие:
где
Длину РЦ можно найти по формуле:
где
Рассмотрим расчет обоих замкнутых контуров. Первый контур: 10СП, 3АП, 16СП, 3БП, 11СП, IП. Рассмотрим пример расчета длин РЦ с применением формулы (1.2):
Второй контур: 12СП, 14СП, IIП, 9СП, 4П.
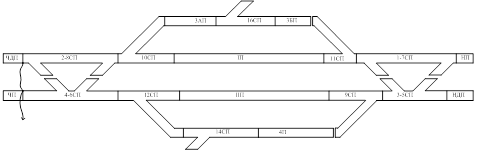
На рисунке 1.2 представлена схема канализации обратного тягового тока.
Рисунок 1.2 - Схема канализации обратного тягового тока
Нумерация стрелочных приводов аналогична нумерации стрелок на однониточном плане. Стрелочные электроприводы не допускается размещать в междупутье между главными путями. В остальных случаях приводы расставляем исходя из удобства обслуживания. Поскольку применяем семипроводную схема управления стрелочным электроприводом, возле каждой стрелки устанавливаем муфту.
Положение светофоров переносим на двухниточный план с однониточного, их нумерация также не изменяется. На двухниточном плане указываем ординаты воздушных промежутков КС, релейные шкафы входных светофоров, кабельную трассу с указанием ординат разветвительных муфт, различные станционные сооружения.
Техническое обеспечение ЭЦ Структурная схема МПЦ
Система централизации Ebilock-950 фирмы Adtranz Signal является расширяемой электронной и компьютерной системой, предназначенной для обеспечения безопасности при движении поездов. Система разработана для управления станциями с любыми типами путевого развития независимо от их размера и перегонов. В совместном предприятии ООО «Бомбардье Транспортейшн (Сигнал)» выполнены адаптационные работы шведского и финского АРМ к условиям российских железных дорог. Структурная схема системы МПЦ Ebilock-950 [3], а также автоматизированные рабочие места дежурного по станции (АРМ-ДСП) и дежурного электромеханика (АРМ-ШН) представлены в приложении Г. На структурной схеме МПЦ показано: автоматизированное рабочее место дежурного по станции (АРМ ДСП); автоматизированное рабочее место электромеханика (АРМ ШН); резерв АРМ ДСП; источник бесперебойного питания (ИБП); распределительный щит входной (РЩ); центральный компьютер (ЦК); концентраторы (КС); объектные контроллеры (ОК); внешние устройства. Автоматизированное рабочее место дежурного по станции (АРМ ДСП) служит для контроля и управления поездным движением. Это интерфейс между системой централизации и человеком. От дежурного по станции в систему поступают команды (например, отмена или установка маршрута), из системы на АРМ идёт индикация - визуальное представление событий на станции. Работа со станционными объектами ведется через систему объектных контроллеров, скомпонованных в концентраторы. Концентраторы и компьютер централизации связаны между собой петлей связи. АРМ может быть как локальным, т.е. располагаться на станции, так и удаленным при диспетчерской централизации в перспективе. Аппаратные требования к АРМ-ДСП взяты из [4]: монитор 18,1² LCD (плоский); графический адаптер «Matrox Millenium»; промышленный компьютер в корпусе РАС-125 на базе процессора Celeron-466, память SDRAM-64 Mb, HDD-10 Gb; сетевая карта для включения в локальную сеть; клавиатура G-83; манипулятор типа «мышь»; принтер Oki Microline-3310; звуковая карта с внутренними усилителями; пассивные колонки. АРМ может: устанавливать маршруты для пропуска поездов, задавать команды и получать индикацию от напольного оборудования; обеспечить обработку поступающих сбоев / неисправностей и событий. При подключении АРМ в информационную сеть существует возможность предоставлять достоверную оперативную информацию по «истории» поездной работы руководству дороги. Применение стандартного персонального компьютера в качестве аппаратной реализации АРМ позволяет снизить стоимость и упростить эксплуатацию и обслуживание системы МПЦ. Основными функциями АРМ-ДСП являются: отображение путевого развития станции с показом текущего состояния объектов контроля и управления; обработка команд дежурного по станции; регистрация событий; обработка сигналов о неисправностях; отображение журнала событий и списка неисправностей. Автоматизированное рабочее место электромеханика (АРМ ШН). Пользовательский интерфейс и общие принципы построения АРМ дежурного по станции и дежурного электромеханика во многом схожи. В АРМ дежурного электромеханика сокращен набор допустимых команд. Общие принципы построения пользовательского интерфейса приведены на примере АРМ дежурного по станции. Аппаратные и программные требования взяты из [4]: монитор 18,1² LCD (плоский); Pentium 133 MHz, 64 Mb RAM, 10Gb жесткий диск, CD-ROM и / или накопитель ZIP; операционная система Windows NT 4.0 должна поддерживать взаимодействие по протоколу TCP/IP и иметь стандартные программы ftp и telnet для связи с IPU950; стандартная сетевая карта, поддерживаемая операционной системой, для взаимодействия между АРМ и системой. Возможно три способа подключения АРМа к системе через плату DEM: - используя AUI разъем. Разъем в системе IPU950 - типа DB15, «мама»; используя коаксиальный кабель. Используется разъем BNC, 3 Т-образных разветвителя и две 50-омные заглушки; используя адаптер. Данный способ используется для соединения оборудования, например, витой парой. В этом случае на AUI разъем устанавливается переходной адаптер. АРМ ШН подсоединяется к IPU950 и обеспечивает взаимодействие электромеханика с системой. АРМ ШН представляет собой экранное приложение, работающее на персональном компьютере и использующее сетевое взаимодействие. АРМ ШН также имеет следующие возможности: индикация ошибочных сообщений. Сбои/неисправности, и сообщения об ошибках показываются в окне журнала. Поддерживается два типа журнала - системный журнал и журнал безопасности. Для удобства просмотра, существует возможность выбора временного интервала. - контроль состояния напольных объектов. В окне журнала выводится состояние выбранного объекта. Возможность сортировки объектов. контроль состояния подключенных систем, т.е. АРМ ДСП, объектные контроллеры. - печать сбоев / неисправностей. АРМ ШН может печатать любую выделенную информацию. - возможность изменения настроек системы в тестовой версии. В рабочей версии такая возможность отсутствует. анализ журналов. загрузка программного обеспечения безопасности. Для непосредственного управления станционными объектами (стрелками, светофорами, сигналами и т.д.) служит система объектных контроллеров. Объектные контроллеры монтируются в специальных шкафах, размещаемых на территории станции. Ядром системы является центральный компьютер (ЦК), который проверяет все условия для безопасного движения поездов и с помощью системы объектных контроллеров управляет станционными объектами. Как в любой вычислительной системе, в этом компьютере выделяется аппаратная часть (hardware) и программное обеспечение (software). Структура ЦК приведена на рисунке 2.1.
Рисунок 2.1 - Схема процессорного устройства
Компьютер централизации представляет собой 19-ти дюймовую стойку (конструктив типа Metric DIN4335610-1) с вертикальным расположением печатных плах (14 позиций, 30 мм), габариты - 483х299х405 мм, вес - 16 кг. Аппаратные характеристики компьютера централизации взяты из [4]: 3 процессора Motorola MC68030; тактовая частота 32 МГ; под FSPA и FSPB отводится по 4 МВ памяти; под SPU - 8 MB. Каждый блок IPU использует собственную коммуникационную подсистему (COU), подсоединенную к общему интерфейсному адаптеру Common Interface Adapter (CIA) и служащую для связи с концентраторами и с автоматизированным рабочим местом дежурного по станции. Процессорный блок централизацииInterlocking Processing Unit (IPU) содержит два синхронно работающих процессорных блока централизации: один функционирует в рабочем режиме (on-line), а другой - в резервном (standby). Резервный процессор не влияет на функционирование рабочего, но к нему непрерывно поступает информация со стороны системного программного обеспечения о состоянии рабочего процессора. В случае сбоя рабочего процессора резервный берет на себя всю обработку информации. Сервисное процессорное устройствоService Processing Unit (SPU) выполняет все асинхронные функции, например, операции по вводу / выводу данных и команд). Работа устройства происходит под управлением UNIX - совместимой операционной системы реального времени DNIX. С помощью синхроимпульсов устройство организует работу с резервным процессорным блоком и с блоками защиты от сбоя. Коммуникационный блок Communication Unit (COU) организует соединение процессорного блока с АРМ ДСП и с концентраторными петлями. В качестве коммуникационного используется широко распространённый протокол HDLC, на физическом уровне - протокол V.24. Внутри каждого IPU-блока находятся по два обособленных друг от друга безопасных процессорных модуля - Fail-Safe Processing Unit FSPU (FSPA, FSPB). Каждый из них выполняет собственную программу (А и В соответственно) по проверке всех зависимостей централизации параллельно с другим. Каждый блок имеет собственный микропроцессор, память и высокоскоростной двунаправленный канал, что позволяет отсылать обработанные данные своему «двойнику» в резервной системе. Разные версии алгоритма работы (А и В программы) обеспечивают корректность выполнения зависимостей в системе централизации. Каждая программа включает в себя логику централизации, описывающую все зависимости между станционными объектами, и установочные данные, настраивающие логику под определенную станцию. Для каждого объекта в составе логики описываются возможные вариации (например, стрелка может быть одиночной или спаренной, с автовозвратом или без и т.д.). Рассматривать работу компьютера централизации лучше всего на взаимодействии трех основных составляющих блока IPU: SPU, FSPA, FSPB. Время начального запуска: < 60 с. Время переключения: < 2,5 цикла. Обработка логики централизации в FSPU происходит циклически. На каждый цикл отводится 560 мс. В течение цикла происходят следующие события: собирается информация, касающаяся состояния всех станционных объектов; происходит обработка информации; формируются приказы на объектные контроллеры; информация о станции передается для индикации на дисплей дежурного по станции. Результаты обработки из FSPA и FSPB сравниваются. Процесс сравнения происходит следующим образом: блок FSPA считывает результаты работы программы В из блока FSPB; блок FSPB считывает результаты работы программы А из блока FSPА; если результаты различны, действие системы прекращается до устранения неисправности; если один из модулей FSPU закончит обработку раньше другого, то на время ожидания он перейдет в состояние отсечки. Система Ebilock-950 может контролировать до 100 логических объектов и до 1000 объектов IPU. Максимальное время срабатывания системы 1 с. Это время между изменением состояния какого-нибудь из станционных объектов и выдачей приказа на объектный контроллер. Автоматизированное рабочее место электромеханика Field Engineering Unit (FEU) стыкуется с компьютером централизации по протоколу Ethernet. Вся система централизации сводится к управлению внешними объектами станции и контролю их состояния при помощи автоматизированного рабочего места дежурного по станции [5]. Условия обеспечения безопасного движения поездов, то есть все зависимости и замыкания, закладываются в программное обеспечение централизации, в алгоритм её работы.
|
|||||||||
|
|
Последнее изменение этой страницы: 2020-03-02; просмотров: 827; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.118.226.105 (0.086 с.) |

 (1.1)
(1.1) - длина самой протяженной РЦ контура, м;
- длина самой протяженной РЦ контура, м; - суммарная длина всех РЦ контура.
- суммарная длина всех РЦ контура. (1.2)
(1.2) - длины ответвлений РЦ;
- длины ответвлений РЦ; - количество длин ответвлений РЦ.
- количество длин ответвлений РЦ.

 , следовательно, в этом контуре не требуется расконтуровка.
, следовательно, в этом контуре не требуется расконтуровка.

 , следовательно, контур тоже оставляем.
, следовательно, контур тоже оставляем.