Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Схема установки и методика проведения экспериментаСодержание книги
Поиск на нашем сайте
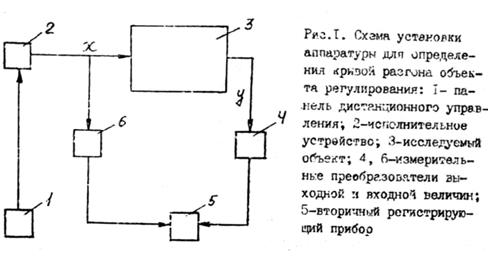
В инженерной практике свойства промышленных объектов регулирования обычно определяют экспериментальным путем. С этой целю технологический объект оснащают аппаратурой для нанесения входных типовых возмущений и определения ответной реакции во времени. При этом применяют аппаратуру, быстродействие всех элементов которой в целом должно значительно превышать быстродействие объекта. Все измерительные преобразователи и исполнительные устройства, как правило, относят к объекту регулирования. На рис.1 приведена схема установки аппаратуры для определения временных характеристик объекта регулирования. Схема включает в себя панель дистанционного управления, исполнительное устройство, исследуемых объект, измерительные преобразователи выходной и входной величин, а так же вторичный регистрирующий прибор. Для снятия кривой разгона объект исследования приводят в равновесие, а затем с помощью панели дистанционного управления и исполнительного устройства наносят на вход объекта ступенчатое возмущение путем энергичного изменения степени открытия проходного сечения регулирующего органа; при этом отмечают момент нанесения возмущения и его величину. Изменение выходной величины регистрируют до тех пор, пока объект не примет нового установившегося значения (объект устойчив) или пока скорость изменения выходной величины не станет постоянной (объект нейтральный).
Если же объект имеет несколько выходных величин, то во время снятия кривой разгона по определенному каналу необходимо следить за постоянством остальных величин, поскольку их изменение может привести к дополнительному нежелательному изменению интересующей нас выходной технологической величины. Если продолжительное ступенчатое возмущение нарушает нормальный режим работы объекта (регулируемая величина отклоняется от допустимых значений), то снимают импульсную переходную характеристику. Пример определения свойств объекта по кривой разгона
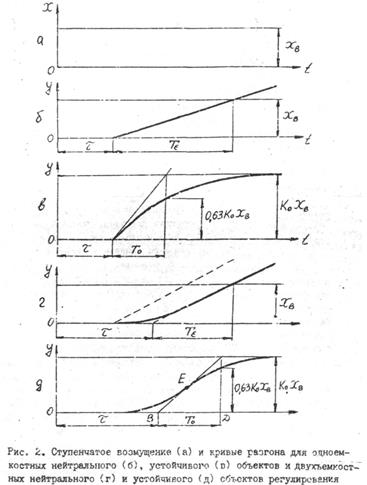
трального (б) объектов первого порядка по каналу “ z-x “: τ – время запаздывания; To – постоянная времени объекта, Кн– коэффициент передачи объекта; x Тε – время разгона объекта Динамика устойчивого объекта первого порядка по каналу “ z- x “ описывается уравнением вида
Кн – коэффициент передачи объекта. При изменении входной и выходной величин в абсолютных приращениях, размерность определяется как отношения размерностей входной и выходной величин. Динамика нейтрального объекта первого порядок по каналу “ z -x “ описывается уравнением вида:
ной величины достигает значения ступенчатого изменения входной величины. τ- время запаздывания объекта. Если изменения входной и выходной величин нейтрального объекта выражены в абсолютных приращениях, то для определения времени разгона Тε необходимо выразить их в относительных приращениях z и x. Аппроксимация объектов второго порядка Объекты 2-ого порядка в первом приближении можно аппроксимировать двумя последовательно соединенными звеньям. Нейтральные объекты 2-ого порядка аппроксимируют звеном запаздывания и интегрирующим звеном, а устойчивые объекты 2-ого порядка – звеном запаздывания и апериодическим звеном 1-ого порядка. При аппроксимации нейтрального объекта 2-ого порядка с запаздыванием через ту его часть кривой разгона, где выходная величина изменяется с постоянной скоростью, проводят наклонную прямую до пересечения с осью абсцисс и принимают, что выходная величина объекта изменяется сначала по горизонтальной, а затем по вновь проведенной наклонной прямой. Время запаздывания τ и время разгона Tε такого объекта определяют по графику. Про аппроксимации устойчивого объекта 2-ого порядка с запаздыванием через точку перегиба Е его кривой разгона проводят касательную до пересечения с осью абсцисс в точке В и принимают, что выходная величина объекта изменяется по ломанной кривой ОВЕ и далее по кривой разгона. Время запаздывания τ и постоянную временя объекта То находят по графику τ =ОВ; То=BD.
|
||||
|
|
Последнее изменение этой страницы: 2016-04-07; просмотров: 590; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 13.58.214.43 (0.007 с.) |

 Кривые разгона обычно определяют на действующем промышленном объекте, изменяя его входную величину на несколько процентов. Использование такого сравнительно небольшого возмущения обусловлено тем, что реакция объекта не должна выходить за пределы ограничений, установленных технологическими соображениями.
Кривые разгона обычно определяют на действующем промышленном объекте, изменяя его входную величину на несколько процентов. Использование такого сравнительно небольшого возмущения обусловлено тем, что реакция объекта не должна выходить за пределы ограничений, установленных технологическими соображениями. Динамические свойства устойчивого (а) и нейтрального (б) объектов первого порядка определяют по кривой разгона по каналу “ z -x “ так, как показано на рис. 3.1
Динамические свойства устойчивого (а) и нейтрального (б) объектов первого порядка определяют по кривой разгона по каналу “ z -x “ так, как показано на рис. 3.1 Рис.3.1. Кривые разгона устойчивого (а) и ней-
Рис.3.1. Кривые разгона устойчивого (а) и ней- – новое равновесное значение выходной величины;
– новое равновесное значение выходной величины; (3.1)Где To– постоянная времени объекта; определяется как время, в течение которого выходная величина объекта достигла бы нового установившегося значения, если бы она изменялась с постоянной скоростью, равной её скорости в начальный момент времени;
(3.1)Где To– постоянная времени объекта; определяется как время, в течение которого выходная величина объекта достигла бы нового установившегося значения, если бы она изменялась с постоянной скоростью, равной её скорости в начальный момент времени; (3.2)Где Тε – время разгона объекта, которое определяется как время, за которое изменение вход-
(3.2)Где Тε – время разгона объекта, которое определяется как время, за которое изменение вход-