Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Автоматизация проходческих комбайнов и погрузочных машинСодержание книги
Поиск на нашем сайте
Содержание темы Основные требования к системам автоматизированного управления проходческими комбайнами. Перечень и характеристика основных систем автоматизированного управления проходческими комбайнами. Принципы автоматической ориентации проходческого комбайна в пространстве. Автоматизация погрузочных машин.
Методические указания 1. Основные требования к системам автоматизированного управления проходческими комбайнами
Системы автоматизированного управления в соответствии с требованиями проекта национального стандарта Украины «Комбайны шахтные проходческие со стреловидным исполнительным органом. Общие технические условия» должны обеспечивать: - управления машинами проходческим комбайном на безопасном расстоянии (20-25м), причем, управление возможно как по проводному, так и по беспроводному каналу; - автоматическое регулирование скорости перемещения исполнительного органа (или частоты вращения исполнительного органа при наличии мехатронной подсистемы привода исполнительного органа на основе частотно-регулируемого электропривода); - автоматическую стабилизацию на заданном токовыми уставками уровне среднего значения мощности электродвигателя подсистемы привода исполнительного органа путем регулирования основного режимного параметра - скорости перемещения этого органа. Реализация этого режима для мехатронизированных проходческих комбайнов обеспечивается с помощью регулятора нагрузки при наличии возможности дроссельного или объемного регулирования значения скорости перемещения исполнительного органа; - автоматизированное управление исполнительным органом путем его вождения по заданной программе. Эта программа первоначально формируется на основе образцового ручного вождения ИО в течение полного рабочего цикла и записывается в виде программного обеспечения для компьютера подсистемы автоматизации. В дальнейшем, в случае необходимости, осуществляется корректировка этой программы. Способ задания программы должен обеспечивать возможность быстрой перенастройки непосредственно на рабочем месте; - автоматическую защиту от опрокидываний и несостоявшихся пусков электродвигателей силовых подсистем;
- контроль технического состояния электрических и гидравлических узлов; - отображение контрольной, оперативной и аварийной информации на пульте управления; - автоматическое управление поворотной частью конвейера при его смещении в горизонтальной плоскости относительно заданного положения; - контроль положения комбайна в выработке; - контроль направления проходимой выработки.
2. Перечень и характеристика основных систем автоматизированного управления проходческими комбайнами
Основными системы автоматизированного управления проходческими комбайнами в настоящее время являются:
1) регулятор нагрузки для проходческих комбайнов типа ПРИЗ-М. Принцип действия регулятора заключается в сравнении сигналов, снимаемых с датчика тока электродвигателя исполнительного органа, с сигналами задания (уставки) и выдачи команд на изменение или отключение подачи комбайна на забой; 2) аппаратура дистанционного управления проходческим комбайном КСП33 типа АДУ-33; 3) комплекс управления и диагностики для проходческой техники унифицированный КПТУ.01; 4) комплектная аппаратура управления проходческим комбайном 4ПП2М типа КУАП; 5) аппаратура АДУ для управления проходческими комбайнами типа ГПКС и погрузочными машинами. При автоматизации проходческих комбайнов также используются аппараты защиты электродвигателей типа КОРД (или его аналоги) и устройство предупредительной сигнализации ПС-КУ [9], блок регистрации БРП - 01 для регистрации параметров работы проходческих комбайнов и других горных машин. Одной из наиболее современных систем автоматизированного управления проходческим комбайном, выполненной с применением микропроцессорной техники, являетсякомплекс КПТУ.01 [2].
Комплекс КПТУ.01
Комплекс является комплектующим изделием проходческих комбайнов П110, П110-01 и предназначен для управления этими комбайнами в зоне визуального контроля их работы, а также для диагностики состояния отдельных узлов гидросистемы и электрооборудования. Комплекс КПТУ.01 обеспечивает выполнение следующих основных функций: - аварийное отключение электропитания проходческой техники. - подачу предупредительного звукового сигнала.
- управление проходческой техникой по беспроводному каналу с пульта радиоуправления. - управление проходческой техникой с пульта местного. - управление проходческой машиной с пультов переносных по двухпроводному каналу связи. - контроль и защиту электродвигателей проходческих машин от перегрева, при «опрокиде» и технологической перегрузке. - блокировку скорости подачи исполнительного органа при нагрузках, превышающих номинальные режимы его работы. - индикацию перегрузки по току защищенных электродвигателей. - контроль и индикацию состояния отдельных блоков электрогидро-оборудования. - защита от потери управляемости электродвигателями приводов комбайна. - блокировка цепей дистанционного управления магнитным пускателем при зафиксированной кнопке «Стоп авар.»; - блокировка скорости подачи исполнительного органа при нагрузках, превышающих номинальные режимы работы электродвигателей исполнительного органа. - контроль и защита электродвигателей проходческого комбайна от перегревания при «опрокидывании» и технологической перегрузке. Комплекс представляет собой локальную сеть, которая состоит из модулей серии I-7000 с присоединенными к ним органами управления, датчиками и исполнительными устройствами; адресуемого терминала ввода-вывода DК-8070. Связь по сети осуществляется с помощью стандартного интерфейса RS-485. Каждый модуль имеет свой строго определенный адрес, который назначается программным путем. Центральным модулем комплекса является контроллер I-7188, расположенный в пульте местном. Работа комплекса осуществляется в соответствии с программой, записанной в памяти контроллера I-7188. Комплекс реализует алгоритм управления проходческим комбайном с пультов (см. рисунок 1): – местного; – переносного 1 и переносного 2 по двухпроводному каналу связи; – радиоуправления по беспроводному каналу связи. Пульт местный ПМ является основным устройством управления комбайном, обеспечивающим прием команд, обработку, формирование и передачу всех исполнительных команд управления электрогидравликой и электроблоком комбайна. Пульт переносной ПП1 предназначен для пере-дачи команд управления всеми механизмами проходческого комбайна в режиме «Дист. 1» и команд управления механизмами комбайна, за ис-ключением управления хвостовой частью комбайна, в режиме «Дист. 2». Пульт переносной ПП2 предназначен для формирования и передачи команд управления хвостовой частью комбайна, перемещением конвейера, перегружателем и отключения комбайна. Управление хвостовой частью комбайна и перегружателем с ПП2 осуществляется только в режиме "Дист. 2". Пульт радиоуправления ПР переназначен для передачи команд управле-ния проходческим комбайном по радиоканалу на частоте 434 МГц.
Рисунок 1 - Состав комплекса КПТУ.01
Комплекс позволяет управлять машиной в зоне прямой видимости с одного из четырех пультов: местного, носимого по радио, двух переносных - основного и хвостового с передачей команд по двухпроводному каналу. С носимого пульта подается 31 команда управления пуском-отключением комбайна, электродвигателями привода исполнительного органа, маслостанции, конвейера, гидродвигателями привода исполнительного органа, питателя, конвейера, опорного устройства. Кроме того, с местного пульта включаются и отключаются электродвигатели перегружателя и пылеотсоса, а с пульта хвостового управляется хвостовая часть конвейера и перегружателя.
На расположенные на местном пульте управления жидкокристаллический дисплей и единичные светодиодные индикаторы выводится информация о 20 диагностируемых параметрах - состоянии узлов электро- и гидрооборудования, в том числе о включении контакторов и промежуточных реле, прохождении команд управления, текущем и предельно допустимом нижнем уровне и предельно допустимой температуре масла в баке, засоренности фильтров гидросистемы, уровне нагрузки защищаемых электродвигателей. Там же отражаются 57 причин отключения механизмов и адресов мест отказов. Это упрощает обслуживание комбайна, позволяет снизить требования к квалификации электрослесарей. При профилактических и наладочных работах можно без включения электроприводов проверить правильность функционирования 26 узлов комбайна и комплекса КПТУ.
Блок регистрации БРП-01
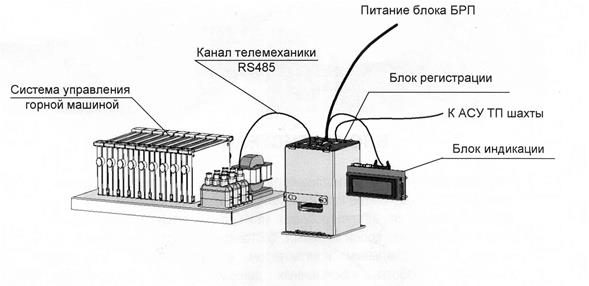
Блок БРП-01предазначен для регистрации параметров работы и происшедших событий во время работы проходческого комбайна или другой горной машины. Блок БРП-01 размещается в электроблоке горной машины.
Рисунок 2 - Блок регистрации БРП-01
Состав БРП-01(см.рисунок 2): - блок регистрации; - устройство сопряженя с персональным компьютером; - блок индикации; - съемный модуль памяти; - блок питания. Информация о параметрах горной машины передается в блок БРП-01при помощи интерфейса связи RS–485 и записывается в съемный блок памяти. Перенос данных с блока на персональный компьютер осуществляется посредством съемного модуля памяти, который подключается к персональному компьюьнру при помощи устройства сопряжения. БРП-01 имеет телемеханический канал связи для передачи информации в общешахтную сеть АСУ ТП.
3. Принцип программного управления исполнительным органом проходческого комбайна
Принцип программного управления заключается в следующем. Машинист, управляя комбайном с пульта дистанционного управления, производит «образцовый» цикл обработки забоя. В этот момент в памяти микропроцессорного блока записывается траектория режущего органа. После завершения цикла записи система готова работать в программном режиме. Запускается микропроцессорный блок, который на основании записанной информации формирует управляющие команды на электрогидроблок. Электрогидроблок комбайна регулирует подачу масла в гидродомкраты, перемещения режущего органа в горизонтальной и вертикальной плоскостях. Выполнение этих команд, а также перемещение питателя контролируют соответствующие датчики. Машинист в это время следит за работой комбайна и в случае необходимости может перейти на режим местного управления.
4. Принципы автоматической ориентации проходческого комбайна в пространстве
Для осуществления направленного движения проходческого комбайна необходимо измерять координаты образующей точки в заданной системе отсчета, связанной с выработкой. Способы нахождения координат определяют принципы построения системы направленного движения проходческого комбайна. Существуют следующие способы измерения: оптические (световые, инфракрасные лучи, луч лазера); гравитационные (маятники, уровни); геодезические (автоматы-нивелиры, планограммы); механические (струна, трос); гироскопические (гировертикаль, гирокомпас); магнитные (компас с магнитомодуляционным датчиком, с датчиком Холла). Непосредственное измерение координаты возможно при оптическом и механическом способе, так как они обеспечивают прямую связь комбайна с неподвижной системой координат отсчета. Остальные способы требуют дополнительных расчетов (специальных вычислительных устройств), позволяющих преобразовать измеряемую величину в координату точки, связанной с комбайном. Необходимо изучить принцип контроля направления движения проходческого комбайна с помощью лазерного луча [3].
5. Автоматизация погрузочных машин
Аппаратура дистанционного управления горно-проходческими машинами АДУ
Аппаратура дистанционного управления горно-проходческими машинами АДУ предназначена для управления основными механизмами погрузочных машин и проходческих комбайнов с переносного пульта управления (ППУ), соединенного с машиной токоведущей перемычкой, с удобного и безопасного места в зоне видимости машины [10]. Аппаратура в зависимости от назначения (для проходческих комбайнов ГПК-Г, К-56МГ; породопогрузочной машины 1ПНБ-2Д, проходческо-очистных комбайнов УРАЛ-10А и УРАЛ-20А, породопогрузочной машины 2ПНБ-2Д, проходческого комбайна ГПКС) выпускается в следующих модификациях: АДУ-0, АДУ-1, АДУ-2, АДУ-3, АДУ-4. Аппаратура АДУ совместно с электрогидравлической системой и магнитной станцией обеспечивает управление с переносного пульта механизмами горно-проходческих машин: магистральным пускателем, подающим питание на машину; гидроприводами механизмов; контакторами электроприводов. Структурная схема аппаратуры АДУ представлена на рисунке 3.
Аппаратура АДУ содержит: переносной пульт управления ППУ механизмами горно-проходческих машин с удобного, безопасного для машиниста места; панель релейную с контролем ПРК для гальванической развязки цепей пульта управления от цепей исполнительных элементов; релейную панель (на рисунке не показана), по назначению и принципу действия аналогичную ПРК; блок запуска БЗ для выдачи разрешения на запуск электроприводов машины только после подачи предупредительного сигнала; тиристорную панель ПТ для включения и отключения контакторов электродвигателей с потребляемым током до 5 А и напряжением питания 36 В; источник питания ИП для подачи питания к цепям управления в ППУ, к ПРК и электромагнитам ЭМ; ящик зажимов (клеммная коробка) КК для коммутации цепей электромагнитов гидроблока; блок разгрузки гидроблока БРГ для включения электромагнита разгрузочного гидрораспределителя при включении одного или нескольких электромагнитов командных гидрораспределителей гидроблока.
Устройство предупредительной сигнализации типа ПС-КУ Устройство ПС-КУ предназначено для формирования и воспроизведения частотно-модулированного звукового сигнала заданной длительности, оповещающего людей, находящихся по близости, о предстоящем включении отдельных частей и узлов проходческих комбайнов, погрузочных машин, буровых машин и маневровых лебедок с электроприводом и о возможном начале их перемещения [9]. Устройство ПС-КУ может применяться в забоях и выработках угольных шахт, в том числе шахт опасных по газу или пыли. Основные функции устройство ПС-КУ: 1. Автоматическая подача предупредительного звукового сигнала при воздействии на органы включения (пуска) машины или отдельных её частей и узлов (длительность подачи предупредительного сигнала, с, не менее 6с, не более 15с.) 2. После подачи звукового сигнала повторное включение (пуск) отдельных машин и механизмов без сигнала, если промежуток времени между двумя следующими друг за другом пусками не превышает 5 с. 3. Возможность дистанционного включения предупредительного сигнала установленной длительности по целям с искробезопасными параметрами и самоконтролем их исправности с последующим включением машины, в том числе по реверсивной схеме управления. 4. Обеспечение нулевой защиты. 5. Автоматический контроль подачи предупредительного звукового сигнала по электрическим параметрам (току и напряжению) в самой удалённой точке. 6. Работоспособность схемы управления при сопротивлении внешней цепи не менее 20 Ом, Uc= 0,85 Uном и снижении сопротивления изоляции до 1 кОм. 7. При кратковременных повышениях напряжения в сети до 1,5 Uном невозможность самопроизвольных включений. 8. Индикацию работы отдельных узлов устройства. Устройство выпускается в пяти вариантах поставки.Состав устройства ПС-КУ для каждого типа размера приведен в таблице 1.
Таблица 1 - Состав устройства ПС-КУ
Вопросы для самопроверки 1. Задачи автоматизации проходческих комбайнов. 2. Основные требования к устройствам и системам автоматизации проходческих комбайнов. 3. Основные устройства и системы автоматизации для проходческих машин и комплексов, выпускаемые предприятиями Украины. 4. Перечислите состав комплекса КПТУ.01. 5. Сформулируйте функции комплекса КПТУ.01. 6. Как осуществляется программное управление исполнительным органом проходческого комбайна. 7. Как осуществляется автоматическое направленное движение проходческого комбайна в пространстве. 8. Функции и состав блока регистрации БРП-01. 9. Назначение и область аппаратуры АДУ. 10. Функции и состав аппаратуры АДУ 11. Назначение, функции и состав аппаратуры ПС-КУ.
Тема 7.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2017-02-19; просмотров: 1277; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.220.147.154 (0.011 с.) |