Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Классификация принципов регулирования
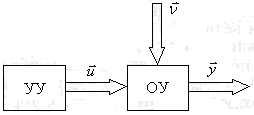
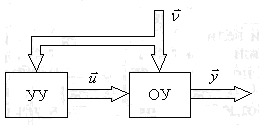
Рисунок 1. Схемы систем управления: разомкнутых с полностью априорной (а) и текущей (б) информацией; замкнутой (в); комбинированной (г) 1. Разомкнутые системы: Характерным для разомкнутой системы является то, что процесс работы системы не зависит непосредственно от результата ее воздействия на управляемый объект. а) принцип управления с полностью априорной информацией Данный принцип управления осуществляется управляющим устройством (УУ) только при заведомо абсолютно точном знании всех внешних и внутренних условиях работы. б) Принцип управления по внешнему возмущению В структуре обязательны датчики возмущения. Данная система является разомкнутой. Достоинства:
Недостатки:
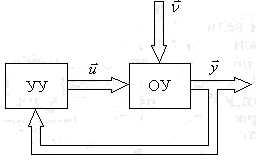
2. Замкнутые системы: в) Принцип управления по отклонению Данная система является замкнутой. Алгоритм работы системы заключен в стремлении свести ошибку управления к нулю. Достоинства:
Недостатки:
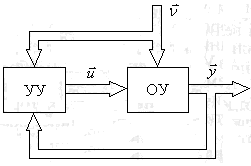
г) Комбинированное управление Комбинированное управление заключено в сочетании двух принципов управления по отклонению и внешнему возмущению. Т.е. сигнал управления на объект формируется двумя каналами. Первый канал чувствителен к отклонению регулируемой величины от задания. Второй формирует управляющее воздействие непосредственно из задающего или возмущающего сигнала. Достоинства:
Недостатки:
|
||||||||||||
|
|
Последнее изменение этой страницы: 2017-02-09; просмотров: 258; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.17.79.60 (0.006 с.) |