
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Функции, выполняемые автоматическими СИ.Содержание книги
Поиск на нашем сайте
Функции, выполняемые автоматическими СИ. Функция измеряемого анализируемого параметра является основной, но не единственной функцией. Все измеряемые физика – химические параметры: температура, давление, влажность, кислотность и другие подлежат превращению в электрический сигнал. Затем этот сигнал сравнивают с эталоном. Результат сравнения оценивается оператором или автоматическим прибором. По величине отклонения судят о качестве измерения. Автоматические приборы выполняют следующие операции: - создание эталонного сигнала сравнения; - хранение информации в памяти прибора; - передача измеренной информации во внешнее устройство прибора с преобразованием в цифровую форму; - создание и гибкое изменение оператором программы измерительного устройства; - обработка результатов измерений в зависимости от вида погрешности и величины неопределенности (однократные или многократные измерения); - представление измерительной информации в графической или табличной форме; - самоконтроль за работой и правильностью измерительных операций отдельными элементами СИ; - контроль за работоспособностью всего автоматизированного комплекса (встроенная система технической диагностики); - корелляция характеристик измерительного прибора по результатам предыдущего пункта. Классификация измерений. Как правило, классифицируются по 5 пунктам: 1.в зависимости от временных характеристик измеряемых величин: - статистические; - динамические измерения. 2. по совокупности физических характеристик измеряемой величины: - механические измерения; - электрические приборы; - тепловые приборы; - оптические измерения. 3. по условиям, определяющим точность измерения: - измерения с максимальной точностью (прецизионные измерения); - контрольно-поверочные измерения; - технические измерения. 4. по числу измерений величины: - однократные; - многократные измерения. 5. в зависимости, каким образом получили результат измерения: - прямые; - косвенные; - совокупные измерения. Погрешность измерений. Погрешность – степень отличия измеряемого значения от истинной величины. Точность измерения – это понятие свидетельствует в какой степени удалось уменьшить влияние погрешности и определить истинное значение величины. На сегодняшний день параметр точности измерения определяют с помощью неопределенности по разработанной методике. Однако в паспортных приборах указываются еще и погрешности определяемые отдельно. Это абсолютные, относительные и приведенные погрешности. Типы погрешности: 1. абсолютная погрешность 2. относительные погрешности – это отношение %, которая показывает, какая доля, приходится на 1-цу измеряемой величины.
Это позволяет сравнить измерения, проведенные в разное время. 3. Приведенная погрешность – какая доля приведенной погрешности пригодится на нормирующие значения ХN- это длины шкал, число делений шкалы измерений, разность между верхним и нижним диапазонам измерения. 4. Класс точности – отражает самую большую погрешность выраженную в %; 5. Вариация показаний – это отношение разности прямого и обратного движения на нормирующую величину
Природа вариации показаний:
1. механические источники вариации. Если сущ. шестиренчато рычажная системы передач в приборах, наличие люфта между шестеренками приводит к появлению зазора. 2. электрическая природа:
Структурные схемы СИ. Для удобства анализа работы СИ их рассматривают в виде структурных схем. В зависимости от метода преобразования СИ делят на 2 класса: 1. прямого преобразования 2. компенсационного преобразования Структурная схема прямого преобразования. ПИП- первичный измерительный преобразователь ИП- измерительный преобразователь ВП- вторичный преобразователь ОУ- отчётное устройство УОП- устройство обратного преобразователя
Входное воздействие Х, выходное- Y. Схема называется так потому что входной сигнал измерения проходит всё СИ. В отличии от 1-ой схемы во 2-ой появляется дополнительное звено.
УОП предназначено для выработки сигнала сравнения меры в измерительном устройстве, что значительно повышает точность измерений. Чувствительность СИ.
S - такая min входная величина которая приводит к уверенному фиксированию выходной величины СИ. С математической точки зрения:
Уверенное фиксирование выходной величины означает: - если шкала отсчетного устройства СИ выполнена в делениях, то уверенно регистрируемым значением будет считаться показание отсчетного устройства с погрешностью не лучше чем ± 0,5 деления.
- Если шкала прибора имеет цифровые обозначения, погрешность СИ ±1 последнего разряда.
Динамические характеристики. Все СИ в своем составе имеют механические и электрические узлы, которые могут реагировать на входной сигнал с задержкой. В связи с этим выходной сигнал появляется позже.
Если входное воздействие является функция от времени то и вых. будет зависить от t. Зависимость y(t)=f(x(t)) является динамической характеристикой в отличии от статической хар-ки. Для определения реакции СИ на входное воздействие используют входной сигнал в виде ступеньки, при этом в автоматических СИ регистрируются следующие виды динамических характеристик: 1. когда выходное воздействие полностью повторяет входное воздействие, то называется безинерционное. 2. функция на выходе представляет апериодический характер, время установления- 0,75 установившегося значения. 3. любой прибор в своем составе имеет инерционные элементы, механические узлы, магнитные цепи, эл.ёмкости и характеристика СИ может иметь колебательный характер периодически затухающих колебаний.
Реостатный ПИП. Реостатный ПИП – ПИП, у которого ф-ция сопротивления=ф-ции перемещения R=f(x), х – механическое перемещение. Этот реостат подключен к источнику, у которого у явл-ся функцией передвижения движка х.
Использ-тся для точных измерений перемещений, размеров образцов. Способы устранения недостатков реостатного ПИПа: 1.значит-ое увеличение Rвх измер-ого преобразователя, тогда Rобщ не зависит от Rх 2.графич-ое опр-ние нелинейной хар-ки реостатного преобр-ля с послед-им изготовлением формы реостата обратной этой зависимости
Фотопреобразователи. Фоторезистивные преобразователи. В физике тв. тела известны явления в материалах обладающих большой работой выхода, незначит. освящения световым потоком в УФ, ИК областях спектра, приводит к выбиванию электронов, кол-во кот. зав-т от вел-ны светового потока Ф, следовательно измен-тся сопротивление образца в целом. При этом измеряется сопротивление образца в целом. Преобразователи с зав-стью Rx=f(Ф) наз. фоторезистивными. Такими св-вами обл. некот. оксиды, фосфиды, селениды. Статич. хар-ка: Рис.
Такие преобр-ли изготовлены в виде диэлектрич. подложек, на кот. нанесена паста – рис.
- прозрачн. стекловидная масса – SiO2. Элем-ты (ФС) исп-тся для регистрации интенсивности светов. потоков, подсчета числа изделий. Кроме фоторезист. проебр-лей эти в-ва использ. для регистрации сверхслабых световых потоков в фотоэлементах (ФЭ). В-во помещают на внутр. стенку вакуумн. стекл. болона, на пов-сть кот. падает световой поток Ф, он выбивает электроны, кот. попадают на анод, при чем образ-тся электрич. цепь, образ-тся электр. ток, вел-на кот. м.б. измерена: как фотоЭДС или как протекающий ток. Uн= Rн*iф Рис.
Для регистрации Iф в цепь включ. Rнагр., с кот. снимают Uн. Использ-тся для регистр. инт-сти светового потока в спектрометрах, спектрофот-х. Фотодиоды и фототранзисторы. Для регистрации свет. потоков можно использ-ть п/проводниковые диоды: Рис.
Принцип действия связан с особенностью ВАХ п/проводникового диода: Рис.
Если область р-n-перехода осв-сть свет. потоком с энергией квантов hν, при обратном включении п/п диода возрастает Iобр, кот. легко регистрируется и пропорц-на световому потоку. В основном такие фотодиоды вып-ся для видимой и ИК областей спектра. Фоторезисторы. Рис.
При изменении светового потока, освещающий эмиторный переход, входн. хар-ка измен-ся. Когда появл-ся освещающий Ф, вых. ток транзистора (Iк) резко возрастает. Явление позволяет регистрировать сверхмалые Ф с одноврем. усилением сигнала. Фотоэлектронный умножитель. Явление выбивания электронов из материала под действием hν использ-ся в фотоумножителях для получ-я знач-го по влиянию фототока. Световой поток попадает на пластину, покрытую в-вом с малой работой выхода электронов. hν выбивает электроны от пов-сти. Рис.
Электроны, попадая на след-ую пластину, выбивая электроны, отраж-ся. Каждая из послед. пластин нах-тся под «+» потенциалом для создания поля притяжения электронов. В послед электрод включ. Rн, по кот. течет сут. фототок, Iфэу. ФЭУ позволяет регистрировать даже един. кванты света. Индуктивные преобразователи Эквивалентная схема индукт. преобр.: Для правильного подключения индукт. датчика в измерит. цепи необходимо представить его электрич. схему. Такие схемы наз. схемы замещения. В измерит. технике использ. 2 вида эквивалентной схемы: 1) для низкочастотных L-датчиков
R=ρ(l/S) 2) для высокочастотных L- датчиков (f<10-30 кГц) Cм.в
Чем больше частота, тем больше См.в Статические характеристики индуктивных преобразователей:
ПИП ИП
Статическая харак-ка – зависимость вых. сигнала от велечины вх. Учитывая сложную функциональную зависимость магнитной проницаемости катушки статич. характеристики нелинейны.
Для устранения нелин. статич. хар-ки используют разбиение индукт. преобразователя на 2 части включенные между собой встечно или дифференциально. Бывают включения L- катушки согласное и встречное. 1)
2)
Достоинство диффер. включения не только в линеаризации статич. хар-ки, но и в увелич. чувствительности, возможность перемещения в обоих направлениях. В измерительной технике на основе такого включения используют диффер. трансформатор, представляющий из себя трансформатор с разделенным на 2 части катушками индуктивности.
При нейтральном расположении сердечника: а) U2=0 – ЭДС и соответствующее им напряжение равны и направлены противоположно др. др. б) при смещении сердечника в любом направлении равенство ЭДС нарушается, на вых. вторичной обмотке возникает напряжение пропорц. перемещению. U2~l На статич. харак-ке эта ситуация отображается след. образом:
Достоинство L-преобразователей: - простота; - надежность; - вопроизводимость статич. хар-ки; - возможность измерений перемещений, Р, Т,v Недостатки: - Нелин. статич. хар-ка; - зависимость от внешних магнитных полей. Емкостные преобразователи
Статические характеристики емкостных ПИП, соотв. каждому из способов изменения C, предст-т собой след. зависимости:
В первом случаи С=f(ε), ε - диэлектрическая проницаемость диэлектрика, емкостной датчик используется для измерения переменной (e), размеров,t,p, уровней и т.д.
Во 2 случае, С=f(S),C - датчик м.использоваться в аналогичных случаях, угловые перемещения.
В 3 случае, С=f(α),C - датчик не исп-ся для измерений небольших переем-ний, поскольку стат. хар-ка в этом случае сильно нелинейно. Конструкции емкостных ПИП 1 плоскостные конд-ры с подвижным дизл-м (измер. перемещений) 2 плоскостные конд-ры с подв. пластинами (лин. и углов. пер-ния)стат. хар-ка при измер. угл. пер-ний нелинейна, исп-т специальные формы пластин:
3 для измерения в автомат.следящих устр-вах используют цилиндрические конд-ры: С=2ΠІε\(ln R\r)
Двухпроводные канд-ры: измер. уровней жидких и сыпучих сред. ε (εдεвоздεж) Мосты переменного тока Измерительный мост с активными сопротивлениями R могут использоваться для измерений лишь резистивных сопротивлений. Существуют датчики индуктивные, емкостные, где питание моста требуется осуществлять переменным токам. Такие мосты наз. мосты переменного тока (м.п.т.). Условия равновесия м.п.т.: z1z4=z2z3
z х
R В связи с тем, что комплексное число представляет из себя сочетание 2-х величин (z – модуль, φ – аргумент), поэтому и условия равновесия м.п.т. будет 2-ва: 1. z1z4=z2z3 2. φ1+φ4 = φ2+φ3
φ1+φ4 = φ2-φх - мост в таком виде в равновесии находиться не может.
Что бы обеспечить равновесие нужно в смежное с измерительным плечом включить элемент имеющий тот же знак φ: φ1-φ4 = φ2-φх – значит, что в плечо φ4 необходимо включить единичное комплексное сопротивление R4 и С4.
Вместо С4 используют магазин емкостей, а вместо R1/R2 – магазин сопротивлений их наз. образцовые элементы. Шкалы этих элементов могут быть проградуированы в размерах измеряемой величины. Одной из разновидностей м.п.т. является трансформаторный измерительный мост. 1 уравновешенный мост
2 Неуравновешенный мост – при изменении сопротивления Rх (сопротивление датчика) появляется ток I0 в измерительной диагонали. Величина I0 пропорционально степени изменения Rх, а шкалу амперметра можно проградуировать в значениях измерительной величины
Автоматический мост
Все сопротивления измерительной схемы (кроме термометра Rt) выполнены из манганина (сплав, сопротивление которого не зависит от температуры). Измерительная схема представляет собой четырехплечий мост, в одно из плеч которого включен Rt. В одну диагональ моста подводится переменное напряжение, в другую – включен электронный усилитель У. R н – добавочный резистор для подгонки тока, протекающего через термометр; R n– подгоночный резистор реохорда; Rm– шунт реохорда, R р – реохорд; R 0 – резистор для подгонки тока из условия минимального самонагрева ТС. Наименее надежным элементом схемы является подвижный контакт реохорда, сопротивление которого может изменяться вследствие истирания, загрязнения и т. д. При указанном на схеме способе включения реохорда переходное сопротивление контакта располагается в измерительной диагонали и в момент равновесия из-за отсутствия тока, не сказывается на результате измерения. Положение движка реохорда зависит от величины Rt следующим образом:
где m – относительное положение движка. Однако в этом случае не удаётся полностью компенсировать влияние температуры окружающей среды на соединительные провода. Кроме того, шунтирование R p сопротивлениями R m и R n с целью получения требуемого диапазона измерения, делает (17) нелинейной. Уменьшение нелинейности достигается введением в схему дополнительного реохорда Rp". Одновременно с перемещением подвижного контакта реохорда перемещается каретка с указателем вдоль шкалы, так, что каждому положению контакта соответствует определенное положение указателя на шкале. В качестве нуль-прибора в автоматическом мосте используется электронный усилитель У и реверсивный двигатель РД. При изменении температуры изменяется сопротивление Rt, равновесие моста нарушается и на диагонали моста ab возникает напряжение разбаланса, которое подается на вход электронного усилителя. Фаза этого напряжения зависит от того, уменьшилось или увеличилось сопротивление Rt. Сигнал разбаланса усиливается до величины, достаточной для приведения в действие реверсивного двигателя РД. Двигатель кинематически связан с кареткой и с подвижным контактом реохорда R p. Движение контакта реохорда происходит до тех пор, пока измерительная схема не придет в равновесие, т. е. Uab не станет равным нулю. Двигатель РД останавливается, а подвижной контакт реохорда и каретка с указателем занимают положение, соответствующее измеряемой температуре. Многоточечный автоматический мост снабжен переключателем, с помощью которого к измерительной схеме подключаются поочередно все присоединенные к прибору термопреобразователи сопротивлений. Назначение остальных резисторов измерительной схемы следующее. Фазовая модуляция. Частота и фаза связаны между собой следующими составляющими: ω= Как видно из этих выражений частотная модуляция и фазовая модуляция связаны друг с другом, т.к. являются производимыми друг от друга, поэтому всё что относится к частотной м.- относится и к фазовой.
Уравновешенные мосты
Мост состоит из двух пост. сопротивлений
Падения напряжений на плечах моста bc и dc также равны:
Разделив (4) на (5), получим:
Если I 0 = 0 то I 1 = I p и I 2 = It. Тогда из ур-ия (11), получим:
Уравнение (12) выражает условие равновесия моста: произведение сопротивлений противоположных плеч равны. Под R p* понимается величина сопротивления незашунтированной части реохорда R p. Из (12) следует, что:
Если R 2 = R l, получим:
Уравнение (7) примет вид:
или (при R 1 = R 2),
т.е. изменение величины Rt под действием измеряемой температуры будет однозначно определяться изменением положения подвижного контакта реохорда. Функции, выполняемые автоматическими СИ. Функция измеряемого анализируемого параметра является основной, но не единственной функцией. Все измеряемые физика – химические параметры: температура, давление, влажность, кислотность и другие подлежат превращению в электрический сигнал. Затем этот сигнал сравнивают с эталоном. Результат сравнения оценивается оператором или автоматическим прибором. По величине отклонения судят о качестве измерения. Автоматические приборы выполняют следующие операции: - создание эталонного сигнала сравнения; - хранение информации в памяти прибора; - передача измеренной информации во внешнее устройство прибора с преобразованием в цифровую форму; - создание и гибкое изменение оператором программы измерительного устройства; - обработка результатов измерений в зависимости от вида погрешности и величины неопределенности (однократные или многократные измерения); - представление измерительной информации в графической или табличной форме; - самоконтроль за работой и правильностью измерительных операций отдельными элементами СИ; - контроль за работоспособностью всего автоматизированного комплекса (встроенная система технической диагностики); - корелляция характеристик измерительного прибора по результатам предыдущего пункта.
|
||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2017-02-17; просмотров: 188; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.220 (0.009 с.) |

 . Это модуль разности истинного измеренного значения величины. Истинное значение стремится к действительному значению, которое определяется физико-химическими методами и приведены в справочниках.
. Это модуль разности истинного измеренного значения величины. Истинное значение стремится к действительному значению, которое определяется физико-химическими методами и приведены в справочниках.






































 C=εε0·S\d C можно изменить, изменяя:
C=εε0·S\d C можно изменить, изменяя:
 1- ε =var (d,S =const)
1- ε =var (d,S =const)
 d 2- S =var (ε,d =const)
d 2- S =var (ε,d =const)




 _____
_____







 z = R±jx=zejφ
z = R±jx=zejφ
 z1z4=z2zх
z1z4=z2zх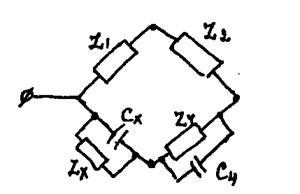
 С некоторым приближением условия равновесия получившегося моста можно записать: R1C4=CxR2 Cx=(R1/R2)·C4
С некоторым приближением условия равновесия получившегося моста можно записать: R1C4=CxR2 Cx=(R1/R2)·C4

 Принципиальная схема автоматического уравновешенного электронного моста приведена на рис.
Принципиальная схема автоматического уравновешенного электронного моста приведена на рис. (17)
(17)

 В бол-стве случаев в комплекте с термопреобразователями сопрот-ний работают уравновеш. мосты пост. или переменного тока. Упрощенная электрич. схема показана на рис. 3.2.
В бол-стве случаев в комплекте с термопреобразователями сопрот-ний работают уравновеш. мосты пост. или переменного тока. Упрощенная электрич. схема показана на рис. 3.2. и
и  , реохорда R P и сопротивления термометра
, реохорда R P и сопротивления термометра  . Соп-ния соединительных проводов
. Соп-ния соединительных проводов  прибавляются к соп-нию
прибавляются к соп-нию  (9)
(9) (10)
(10) (11)
(11) (12)
(12) (13)
(13) (14)
(14) При изменении сопротивления Rt, равновесие моста нарушается и его можно восстановить путём изменения величины сопротивления реохорда R р*. При этом положение движка реохорда будет соответствовать измеряемой температуре и её определяют по шкале прибора Шк. Это справедливо, если колебания температуры среды, в которой расположены соединительные провода с сопротивлением 2 R np, не существенны. В тех случаях, когда изменения температуры в зоне соединительных проводов могут быть значительными и погрешность измерения может превысить допустимую величину, применяют трёхпроводную систему подключения ТС. В этой схеме (рис. 3.3) провод от источника питания отсоединяется от точки с моста и подключается к точке с ', разделяя провода с сопротивлением R np в смежные плечи. При таком соединении сопротивление одного провода прибавляется к терморезистору, а второго – к R p.
При изменении сопротивления Rt, равновесие моста нарушается и его можно восстановить путём изменения величины сопротивления реохорда R р*. При этом положение движка реохорда будет соответствовать измеряемой температуре и её определяют по шкале прибора Шк. Это справедливо, если колебания температуры среды, в которой расположены соединительные провода с сопротивлением 2 R np, не существенны. В тех случаях, когда изменения температуры в зоне соединительных проводов могут быть значительными и погрешность измерения может превысить допустимую величину, применяют трёхпроводную систему подключения ТС. В этой схеме (рис. 3.3) провод от источника питания отсоединяется от точки с моста и подключается к точке с ', разделяя провода с сопротивлением R np в смежные плечи. При таком соединении сопротивление одного провода прибавляется к терморезистору, а второго – к R p. (15)
(15) , (16)
, (16)


