Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
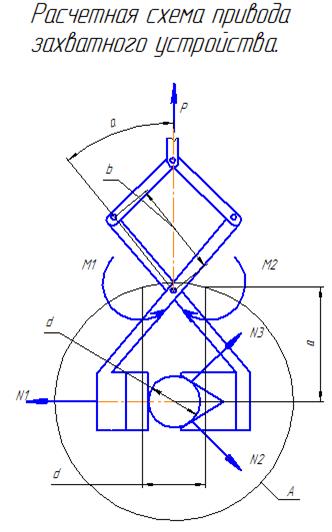
Расчет захватного устройства промышленного робота ⇐ ПредыдущаяСтр 4 из 4
Расчет механических захватных устройств включает нахождение сил, действующих в местах контакта заготовки и губок; определение усилий привода; проверку отсутствия повреждений поверхности детали при захватывании; расчет на прочность деталей захватных устройств. Последний ведется по обычным методикам расчета деталей машин. Различают следующие схемы удержания объектов в механическом захватном устройстве: - деталь поддерживается губкой захватного устройства, силы трения - деталь удерживается благодаря запирающему действию губок при - деталь удерживается силами трения; На практике обычно встречается сложное нагружение захватных устройств, при котором имеет место комбинация описанных случаев. При этом в процессе манипулирования объектом характер и схемы удержания детали могут изменяться. Поэтому расчет необходимо вести для критического случая нагружения. Существуют клиновых, рычажных и реечных передаточных механизмов. Рычажные передаточные механизмы получили наибольшее распространение, поскольку обеспечивают выигрыш в усилии зажима детали. По сравнению с рычажными реечные передачи имеют меньшие габаритные размеры, обеспечивают большее раскрытие губок, но не дают выигрыша в усилии зажима объекта. Определение напряжений на поверхностях контакта захватного устройства с объектом манипулирования может потребоваться как при расчете устройства, так и установлении возможности повреждения объекта при его захватывании и удержании. В ряде случаев, особенно при удержании детали благодаря силам трения, усилия, действующие в местах контакта с захватным устройством, бывают значительными, это может привести к повреждению поверхности детали, что недопустимо при чистовой обработке, или к повреждению зажимных губок захватного устройства. Исходные данные для расчета: 1. Диаметр заготовки dз=105 мм, 2. Масса заготовки М=30 кг. 3. Углы призм α1=120°, α2=60°. 4. Угол поворота плоскости разъема - 15°
Геометрические параметры: a=0,22 м; b=0,19 м; с=0,12 м.
Рассчитаем усилия привода передаточного механизма захватного устройства, по следующим формулам:
где
Для расчета сил, действующих в местах контакта заготовки и элементов захвата приведем формулы:
Рассчитаем силы реакции и силы трения:
Рассчитаем удерживающий момент привода захватного устройства:
Усилие зажима должно быть:
Вывод: необходимо приложить усилие равно или более 177,9Н, для того чтобы обеспечить нужный удерживающий момент привода захватного устройства. ЗАКЛЮЧЕНИЕ
В данной курсовой работе был произведен анализ производительности роботизированного технологического комплекса механической обработки. На основании алгоритма функционирования РТК, где был задействован пристаночный накопитель станка В, произведены необходимые расчеты, построена циклограмма функционирования РТК. Согласно данному варианту, наиболее долгая обработка осуществляется на станке Б, поэтому для достижения наиболее эффективного цикла работы РТК необходимо было максимально быстро запускать его, так как от него зависела вся длинна цикла работы РТК. При разработке циклограммы были учтены все эти условия и обеспечены минимальные простои станка Б. ЛИТЕРАТУРА
1. Задания и методические указания к курсовой работе “Анализ производительности роботизированного технологического комплекса механообработки” по дисциплине “Автоматизация производственных процессов в машиностроении” для студентов специальности 12.01 – “Технология машиностроения” И.В. Коновалов, БПИ 1991. – 14 с. 2. Ю.Г. Козырев Промышленные роботы. Справочник. М.: Машиностроение, 1983-376с.
|
|||||
|
|
Последнее изменение этой страницы: 2017-02-17; просмотров: 360; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.12.162.179 (0.006 с.) |


 - удерживающий момент
- удерживающий момент