Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Расчет электромеханических характеристик электропривода
В случае использования пропорционального регулятора скорости электромеханическая характеристика электропривода определяется в зоне стабилизации скорости по выражению
где
В случае использования пропорционально-интегрального регулятора скорости электромеханическая характеристика электропривода определяется в зоне стабилизации скорости по выражению
В зоне стабилизации тока электромеханическая характеристика электропривода определяется по выражению
Задающие воздействия находятся для заданных значений частот вращения по формуле
Электромеханические характеристики строятся для заданных значений скоростей вращения. На электромеханической характеристике нужно построить зону гранично-непрерывного тока, используя следующую формулу
Моделирование переходных процессов
Моделирование переходных процессов рекомендуется производить на ЭВМ с использованием программы SIAMM. Для моделирования необходимо составить структурную схему с учетом стандартных блоков программы SIAMM. Затем следует рассчитать коэффициенты этой схемы и выполнить моделирование при подаче на вход сигнала, обеспечивающего получение максимальной скорости вращения.
Техническая реализация элементов Системы подчиненного регулирования
Элементы системы подчиненного регулирования реализуются обычно на базе операционных усилителей.
7.1. Схема пропорционального регулятора представлена на рис. 4. Рис. 4. Схема пропорционального регулятора
Передаточная функция регулятора имеет следующий вид:
где При выборе параметров регулятора следует задать один из них, например 7.2. Схема интегрального регулятора представлена на рис. 5. Передаточная функция регулятора имеет следующий вид:
где
Рис. 5. Схема интегрального регулятора
При выборе параметров регулятора следует задать один из них, например Следовательно, 7.3. Схема пропорционально-интегрального регулятора представлена на рис. 6
Рис. 6. Схема пропорционально-интегрального регулятора
Передаточная функция регулятора имеет следующий вид:
где
При выборе параметров регулятора следует задать один из них, например
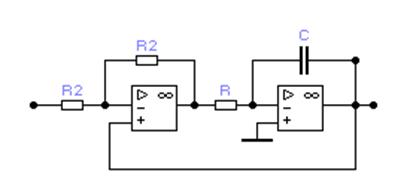
7.4. Схема задатчика интенсивности приведена на рис. 7. Рис. 7.Схема задатчика интенсивности
Параметры схемы выбираются следующим образом. Задается значение сопротивления R1=10 кОм. Сопротивление R2=10×R1. Задается значение емкости, например, С=2 мкФ и определяется R=To/C, где То – постоянная времени задатчика интенсивности. 7.5. Схема звена ограничения тока приведена на рис. 8. В данной схеме сопротивления резисторов R2-R5 можно принять равными 10 кОм, а сопротивление R1=2 кОм.
Справочные данные
|
||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2017-02-07; просмотров: 111; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.149.251.155 (0.008 с.) |
 ,
, - угловая скорость вращения якоря электродвигателя;
- угловая скорость вращения якоря электродвигателя; - величина задающего напряжения;
- величина задающего напряжения; - ток якоря электродвигателя.
- ток якоря электродвигателя. .
. .
. .
. .
.
 ,
, - коэффициент усиления регулятора.
- коэффициент усиления регулятора. кОм. Остальные параметры необходимо рассчитать. Так, например, пропорциональный регулятор контура скорости имеет коэффициент усиления
кОм. Остальные параметры необходимо рассчитать. Так, например, пропорциональный регулятор контура скорости имеет коэффициент усиления  . Следовательно,
. Следовательно,  .
. ,
, - постоянная времени интегрального регулятора.
- постоянная времени интегрального регулятора.
 .
. .
.
 ,
, - постоянная времени интегральной составляющей.
- постоянная времени интегральной составляющей. , а постоянную времени интегральной составляющей
, а постоянную времени интегральной составляющей  . Следовательно,
. Следовательно,  , а
, а  .
.