Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Кафедра электропривода и электрооборудованияСтр 1 из 8Следующая ⇒
МИНИСТЕРСТВО ТРАНСПОРТА РОССИЙСКОЙ ФЕДЕРАЦИИ САНКТ-ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ВОДНЫХ КОММУНИКАЦИЙ
КАФЕДРА ЭЛЕКТРОПРИВОДА И ЭЛЕКТРООБОРУДОВАНИЯ БЕРЕГОВЫХ УСТАНОВОК ВОДНОГО ТРАНСПОРТА
СИСТЕМЫ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДА
Методические указания К курсовому проекту Тиристорного электропривода постоянного тока
Санкт-Петербург
УДК 621.313.12-8 ББК 31.291-04
Рецензент: к.т.н., доцент Е.Г. Барщевский. Составители: к.т.н., доц. Н.В. Белоусова; Д.т.н., проф. В.Ф. Самосейко. Системы управления электропривода: Методические указания к курсовому проекту тиристорного электропривода постоянного тока. – СПб.: СПГУВК, 2000. – 31 с.
Предназначены для студентов электротехнического факультета, обучающихся по специальности 180400 Электропривод и автоматика промышленных установок и технологических комплексов. Содержат материалы по проектированию электроприводов постоянного тока с тиристорными преобразователями, выбору элементов, синтезу системы подчиненного регулирования и технической реализации элементов системы управления, а также различные справочные данные.
Печатается по решению редакционно-издательского совета Санкт-Петербургского государственного университета водных коммуникаций.
УДК 621.313.12-8 ББК 31.291-04 Ó Санкт-Петербургский государственный университет водных коммуникаций, 2000. Содержание
1. Содержание и объем проекта......……………………………………...4 2. Исходные данные для проектирования……………………………….4 3. Расчет силовой части электропривода постоянного тока………....5 3.1. Состав электрооборудования электропривода постоянного тока…..…………………………………………………5 3.2. Выбор силового согласующего трансформатора для тиристорного электропривода………..………………………6 3.3. Выбор сглаживающего дросселя……………………………........9 3.4. Выбор тиристоров преобразователя…………………………....12 4. Расчет параметров подчиненной системы управления ………….13 4.1. Расчет параметров электродвигателя как звена структурной схемы………………………………………………….14 4.2. Расчет параметров тиристорного преобразователя
как звена структурной схемы ………….....……………….……..15 4.3. Расчет параметров контура тока……….………………………..17 4.4. Расчет параметров звена ограничения тока…………………..18 4.5. Расчет параметров контура скорости….……………………….19 5. Расчет электромеханических характеристик электропривода.....22 6. Моделирование переходных процессов………..…………………...23 7. Техническая реализация элементов системы подчиненного регулирования…...………………………………….….23 8. Справочные данные по тиристорным преобразователям……….26 9. Справочные данные по силовым трансформаторам…..…………27 10. Задание на курсовой проект………………………………….………28 11. Варианты заданий….………………………………………………….30 Содержание и объем проекта
Курсовой проект должен состоять из пояснительной записки объемом не более 25 страниц текста, графиков и схем. Все расчеты должны производиться в системе единиц СИ. В пояснительной записке должны быть отражены ответы на следующие вопросы. 1.1. Расчет и выбор параметров силовой части электропривода. 1.2. Расчет параметров подчиненной системы управления. 1.3. Расчет статических характеристик электропривода. 1.4. Результаты моделирования динамических процессов в электроприводе: пуск без нагрузки, пуск под номинальной нагрузкой, наброс номинальной нагрузки. 1.5. Схемы системы управления электроприводом с расчетом их параметров (командоаппарата, задатчика интенсивности, регуляторов тока и скорости, системы импульсно-фазового управления преобразователя). 1.6. Общая схема электропривода, включающая в себя систему управления, защиту и сигнализацию.
Исходные данные для проектирования
2.1. Тип электропривода (реверсивный). 2.2. Тип электродвигателя. 2.3. Тип преобразователя. 2.4. Момент инерции механизма, в долях от момента инерции якоря электродвигателя. 2.5. Точность поддержания скорости, в процентах от номинальной скорости вращения электродвигателя. 2.6. Кратность максимального тока электродвигателя. 2.7. Наибольшее значение гранично-непрерывного тока, в процентах от номинального.
2.8. Коэффициент пульсаций выпрямленного тока. 2.9. Четыре значения скорости вращения, задаваемые командоаппаратом, в долях от номинальной скорости. 2.10. Значение скорости, с которой электродвигатель работает наибольшее время, в долях от номинальной скорости.
Состав электрооборудования Рис. 1. Функциональная схема тиристорного электропривода
3.2.1. Рассчитывается среднее значение напряжения на выводах постоянного тока тиристорного преобразователя при угле управления
где
3.2.2. Рассчитывается мощность тиристорного преобразователя
где 3.2.3. Рассчитывается коэффициент полезного действия тиристорного преобразователя
где
3.2.4. Рассчитывается мощность трансформатора для питания тиристорного преобразователя
где 3.2.5. Определяется в относительных единицах величина эквивалентного сопротивления, учитывающая снижение выпрямленного напряжения из-за угла коммутации вентилей. Его величина зависит от параметров трансформатора и принимается приближенно равной
где
3.2.6. Рассчитывается максимальное значение э.д.с. тиристорного преобразователя, соответствующее углу управления
где
3.2.7. Рассчитывается действующее значение фазного напряжения на фазных выводах тиристорного преобразователя, которое соответственно равно фазному напряжению вторичной обмотки трансформатора
где
3.2.8. По расчетной мощности и напряжению выбирается силовой согласующий трансформатор для питания преобразователя.
Как звена структурной схемы
Электродвигатель содержит два звена, охваченных внутренней обратной связью. Первое звено электродвигателя представляет собой его электрическую часть; оно имеет апериодическую передаточную функцию
где
Рис. 2. Структура системы подчиненного регулирования: РС - регулятор скорости; ОТ - ограничитель тока;
РТ - регулятор тока; ТП - тиристорный преобразователь; ЭД - электродвигатель; ДТ - датчик тока; ДС - датчик скорости.
Второе звено электродвигателя представляет собой его механическую часть. Это звено имеет передаточную функцию следующего вида
где
Как звена структурной схемы
Преобразователь можно представить в виде двух звеньев, соединенных последовательно: силовой части и системы импульсно-фазового управления. Полагается, что силовая часть преобразователя и система импульсно-фазового управления являются апериодическими звеньями первого порядка. Звенья тиристорного преобразователя соединены последовательно и аппроксимируются одним апериодическим звеном первого порядка. Данное апериодическое звено имеет постоянную времени, равную сумме постоянных времен силовой части преобразователя и системы импульсно-фазового управления. Система управления преобразователя обладает инерционностью. Инерция системы управления преобразователем обусловлена наличием RC-фильтра, имеющего постоянную времени Силовая часть преобразователя имеет инерционность, обусловленную запаздыванием импульсов управления. Среднее значение времени запаздывания
где Инерционность преобразователя может быть приближенно охарактеризована суммой постоянных времени силовой части преобразователя и его системы управления
где Статический коэффициент передачи преобразователя (коэффициент усиления) находится следующим образом. Входной величиной силовой части преобразователя является э.д.с.
Входной величиной системы управления преобразователя является напряжение
При синусоидальном опорном напряжении СИФУ угол управления должен быть связан с напряжением
Зависимость э.д.с. преобразователя от напряжения системы управления определяется соотношением
Подставляя выражения для
Линейная аппроксимация этой зависимости должна иметь вид
где Тогда передаточная функция преобразователя может быть представлена апериодическим звеном первого порядка
Рис. 3. Нелинейное звено ограничения максимального значения тока
Рис. 4. Схема пропорционального регулятора
Передаточная функция регулятора имеет следующий вид:
где При выборе параметров регулятора следует задать один из них, например 7.2. Схема интегрального регулятора представлена на рис. 5. Передаточная функция регулятора имеет следующий вид:
где
Рис. 5. Схема интегрального регулятора
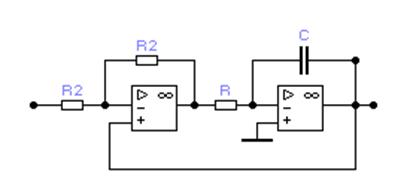
При выборе параметров регулятора следует задать один из них, например Следовательно, 7.3. Схема пропорционально-интегрального регулятора представлена на рис. 6
Рис. 6. Схема пропорционально-интегрального регулятора
Передаточная функция регулятора имеет следующий вид:
где
При выборе параметров регулятора следует задать один из них, например
7.4. Схема задатчика интенсивности приведена на рис. 7. Рис. 7.Схема задатчика интенсивности
Параметры схемы выбираются следующим образом. Задается значение сопротивления R1=10 кОм. Сопротивление R2=10×R1. Задается значение емкости, например, С=2 мкФ и определяется R=To/C, где То – постоянная времени задатчика интенсивности. 7.5. Схема звена ограничения тока приведена на рис. 8. В данной схеме сопротивления резисторов R2-R5 можно принять равными 10 кОм, а сопротивление R1=2 кОм.
Справочные данные Справочные данные По силовым трансформаторам
Трансформаторы, справочные данные по которым приведены в таблице, имеют на вторичной обмотке отпайки, позволяющие понижать напряжение на 20% с шагом 5%. Индуктивное сопротивление короткого замыкания трансформатора при указанной схеме соединений в относительных единицах составляет 0,24-0,18. Активное сопротивление короткого замыкания трансформатора при указанной схеме соединений в относительных единицах составляет 0,24-0,18. Большие сопротивления относятся к трансформаторам меньшей мощности.
Задание на курсовой проект 10.1. Тип электродвигателя постоянного тока и его параметры
10.2. Индуктивность фазы сети, в долях от индуктивности якоря двигателя
10.3. Точность поддержания скорости, в процентах от номинальной
10.4. Момент инерции механизма, приведенный к валу двигателя, в долях от момента инерции двигателя
10.5. Наибольшее значение гранично-непрерывного тока, в процентах от номинального тока
10.6. Кратность максимального тока двигателя
10.7. Значения скоростей двигателя (n1, n2, n3, n4) и скорость, с которой двигатель работает наибольшее время n', в долях от номинальной
Варианты заданий
МИНИСТЕРСТВО ТРАНСПОРТА РОССИЙСКОЙ ФЕДЕРАЦИИ САНКТ-ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ВОДНЫХ КОММУНИКАЦИЙ
КАФЕДРА ЭЛЕКТРОПРИВОДА И ЭЛЕКТРООБОРУДОВАНИЯ
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2017-02-07; просмотров: 177; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.131.13.37 (0.088 с.) |


 =1,1-1,15 – коэффициент, учитывающий возможное понижение напряжения сети;
=1,1-1,15 – коэффициент, учитывающий возможное понижение напряжения сети; – номинальное напряжение на якоре электродвигателя.
– номинальное напряжение на якоре электродвигателя.
 – выпрямленный ток преобразователя, равный току якоря электродвигателя.
– выпрямленный ток преобразователя, равный току якоря электродвигателя. ,
, – число вентилей преобразователя, обтекаемых током в каждый момент времени;
– число вентилей преобразователя, обтекаемых током в каждый момент времени; – падение напряжения на вентиле в прямом направлении.
– падение напряжения на вентиле в прямом направлении.
 – коэффициент использования трансформатора, равный отношению мощности трансформатора к мощности тиристорного преобразователя.
– коэффициент использования трансформатора, равный отношению мощности трансформатора к мощности тиристорного преобразователя.
 - число пульсаций выпрямленного напряжения на периоде напряжения сети;
- число пульсаций выпрямленного напряжения на периоде напряжения сети; - величина индуктивного сопротивления короткого замыкания трансформатора, в относительных единицах равная 0,14-0,18;
- величина индуктивного сопротивления короткого замыкания трансформатора, в относительных единицах равная 0,14-0,18; - величина активного сопротивления короткого замыкания трансформатора, в относительных единицах равная 0,024 - 0,058.
- величина активного сопротивления короткого замыкания трансформатора, в относительных единицах равная 0,024 - 0,058.
 – коэффициент схемы тиристорного преобразователя по напряжению, равный отношению среднего значения выпрямленного напряжения к действующему значению фазного напряжения вторичной обмотки трансформатора;
– коэффициент схемы тиристорного преобразователя по напряжению, равный отношению среднего значения выпрямленного напряжения к действующему значению фазного напряжения вторичной обмотки трансформатора; – коэффициент схемы тиристорного преобразователя по току, равный отношению среднего значения выпрямленного тока к действующему значению фазного тока.
– коэффициент схемы тиристорного преобразователя по току, равный отношению среднего значения выпрямленного тока к действующему значению фазного тока.
 – коэффициент, учитывающий запас по углу управления, принимаемый равным 1,05.
– коэффициент, учитывающий запас по углу управления, принимаемый равным 1,05. ,
, - статический коэффициент передачи;
- статический коэффициент передачи; - электрическая постоянная времени цепи якоря электродвигателя.
- электрическая постоянная времени цепи якоря электродвигателя.
 ,
, - коэффициент интегрального звена. Момент инерции электродвигателя
- коэффициент интегрального звена. Момент инерции электродвигателя  берется из справочных данных на электродвигатель. Момент инерции механизма
берется из справочных данных на электродвигатель. Момент инерции механизма  задан в исходных данных на проектирование в долях от
задан в исходных данных на проектирование в долях от  , равную 0,005-0,01 сек.
, равную 0,005-0,01 сек. ,
, - период напряжения сети.
- период напряжения сети. ,
, , а выходной величиной - угол
, а выходной величиной - угол  . Они связаны соотношением
. Они связаны соотношением .
. , а выходной величиной – угол фазового управления
, а выходной величиной – угол фазового управления  . При линейном опорном напряжении СИФУ угол управления должен быть связан с напряжением
. При линейном опорном напряжении СИФУ угол управления должен быть связан с напряжением  зависимостью
зависимостью .
. .
. .
. ,
, коэффициент усиления преобразователя.
коэффициент усиления преобразователя. .
. ,
, - коэффициент усиления регулятора.
- коэффициент усиления регулятора. кОм. Остальные параметры необходимо рассчитать. Так, например, пропорциональный регулятор контура скорости имеет коэффициент усиления
кОм. Остальные параметры необходимо рассчитать. Так, например, пропорциональный регулятор контура скорости имеет коэффициент усиления  . Следовательно,
. Следовательно,  .
. ,
, - постоянная времени интегрального регулятора.
- постоянная времени интегрального регулятора.
 .
. .
.
 ,
, - постоянная времени интегральной составляющей.
- постоянная времени интегральной составляющей. , а постоянную времени интегральной составляющей
, а постоянную времени интегральной составляющей  . Следовательно,
. Следовательно,  , а
, а  .
.