Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Принципы построения структурных схем асу ТП: одноуровневые централизованные и децентрализованные, многоуровневые.Содержание книги
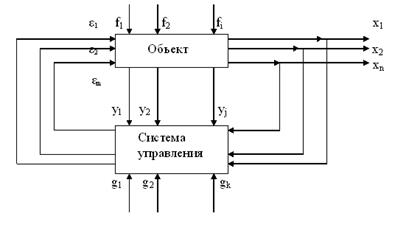
Поиск на нашем сайте Под структурой управления понимается совокупность частей автоматической системы, на которые она может быть разделена по определенному признаку, а также пути передачи воздействий между ними. Графич. изображение структуры управления называется структурной схемой. Полная структура управления должна разрабатываться проектной организацией. Выбор структуры управления объектом автоматизации оказывает существенное влияние на эффективность его работы, снижение относительной стоимости системы управления, ее надежности, ремонтоспособности и т. д. В самом общем виде структурная схема системы автоматизации представлена на рис. 8.1. Система автоматизации состоит из объекта автоматизации и системы управления этим объектом. Благодаря определенному взаимодействию между объектом автоматизации и системой управления система автоматизации в целом обеспечивает требуемый результат функционирования объекта, характеризующийся параметрами х1, х2,..., хn.
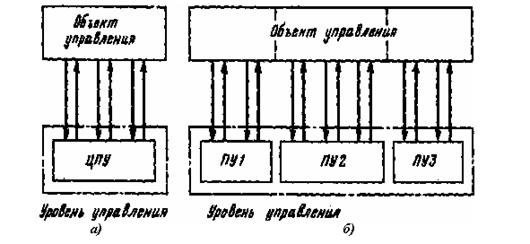
Рис. 8.1. Структурная схема системы автоматизации К этим параметрам можно отнести, например, величины, характеризующие целесообразный конечный продукт технологического процесса, отдельные параметры, определяющие ход технологического процесса, его экономичность, обеспечение безаварийного режима и т. д. Кроме этих основных параметров, работа комплексного объекта автоматизации характеризуется рядом вспомогательных параметров y1, y2,... yi, которые также должны контролироваться и регулироваться (например, поддерживаться постоянными). К такого рода параметрам можно отнести, например, величины, характеризующие работу установок подготовки технологического пара, насосных станций оборотного водоснабжения и т. д. От этих установок требуется только подача на вход технологической установки сырья и энергоносителей с заданными параметрами. При этом необходимая дозировка подачи сырья и энергоносителей осуществляется средствами управления, относящимися к технологической установке. В процессе работы на объект поступают возмущающие воздействия f1, f2,... fi, вызывающие отклонения параметров x1, х2,..., хn от их требуемых значений. Информация о текущих значениях x1, х2,..., хn, у1, у2,..., yi поступает в систему управления и сравнивается с предписанными им значениями g1, g2,..., gk, в результате чего система управления вырабатывает управляющие воздействия ε1, ε2… εm для компенсации отклонений выходных параметров. Таким образом, объект автоматизации в общем случае состоит из нескольких в большей или меньшей степени связанных друг с другом участков управления. Участки управления физически могут представляться в виде отдельных установок, агрегатов и т. д. или в виде локальных каналов управления отдельными параметрами одних и тех же установок, агрегатов и т. д. В свою очередь, система управления в зависимости от важности регулируемых параметров, круга работников эксплуатационного персонала, которым необходимо знать их значения для осуществления оптимального управления объектом, в общем случае должна обеспечивать разные уровни управления объектом автоматизации, т. е. должна состоять из нескольких пунктов управления, в той или иной степени взаимосвязанных друг с другом. С учетом изложенного структуры управления объектом автоматизации могут быть в частных случаях одноуровневыми централизованными, одноуровневыми децентрализованными и многоуровневыми. Одноуровневые системы управления, в которых управление объектом осуществляется с одного пункта управления, называются централизованными. Одноуровневые системы, в которых отдельные части сложного объекта управляются из самостоятельных пунктов управления, называются децентрализованными. Структурные схемы одноуровневых централизованных и децентрализованных систем приведены на рис. 8.2, на котором стрелками показаны только основные потоки передачи информации от объекта управления к системе управления и управляющие воздействия системы на объект управления. На рис. 8.2 отдельные части сложного объекта управления, управляемые соответственно с пунктов ПУ1 — ПУ3, разделены штриховыми линиями. Одноуровневые централизованные системы применяются в основном для управления относительно несложными объектами или объектами, расположенными на небольшой территории. Большинство промышленных объектов в настоящее время представляет собой сложные комплексы, отдельные части которых расположены на значительном расстоянии друг от друга.
Рис. 8.2. Примеры одноуровневых систем управления: а – централизованная система; б - децентрализованная система
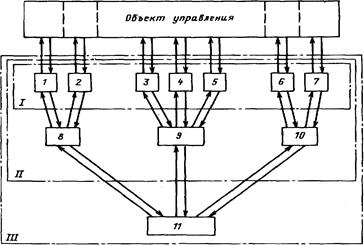
Рис. 8.3. Пример трехуровневой системы управления: I – III – уровни управления
Кроме основных технол. установок, объекты имеют большое число вспомогат. установок-подобъектов (промышленные котельные, компрессорные, насосные станции оборотного водоснабжения, котлы-утилизаторы, очистные сооружения и т. п.), которые необходимы для обеспечения технол. установок всеми видами энергии, а также для утилизации и нейтрализации остаточных продуктов технол. процесса. Если управление такого комплексного объекта построить по одноуровневой централизованной системе, то намного усложнятся коммуникации системы управления, резко возрастут затраты на ее сооружения и эксплуатацию, центральный пункт управления получится громоздким. Переработка информации, большая часть которой является ненужной для непосредственного ведения технол. процесса, представляет большие затруднения. Удаленность пункта управления от того или иного вспомогат. подобъекта затрудняет принятие оперативных мер по устранению тех или иных неполадок. В этом случае более приемлемой становится одноуровневая децентрализованная система управления. С помощью одноуровневых систем не всегда представляется возможным оптимально решить вопросы управления технол. процессами. Это в первую очередь относится к сложным технол. процессам. Тогда целесообразно переходить к многоуровневым системам управления. В качестве примера на рис. 8.3 представлена трехуровневая система управления сложным объектом с разветвленными технол. связями между установками. Отдельные технол. установки управляются децентрализованно с пунктов управления 1 — 7. Это первый уровень управления. С пунктов 1 — 7 соответственно управляются объекты, имеющие существенную технологическую взаимосвязь. В связи с этим наиболее ответственные регулируемые параметры установок передаются на пункты управления 8 — 10 второго уровня управления. Основные параметры, определяющие технол. процесс объекта в целом, могут управляться и контролироваться с пункта управления 11 третьего уровня. Для первого уровня при проектировании целесообразно предусматривать три режима управления: 1) командами, поступающими от уровня более высокого ранга; 2) командами, формирующимися непосредственно на первом уровне; 3) командами, поступающими как с уровня более высокого ранга, так и формирующимися непосредственно на первом уровне. Для уровня второго ранга и выше возможны четыре режима работы: 1) аппаратура данного i-го ранга принимает и реализует в управляющие воздействия команды (i + 1)-го ранга; 2) команды формируются непосредственно на аппаратуре i-го ранга; 3) все функции управления с i-го ранга передаются на аппаратуру (i — 1)-го ранга; 4) часть команд на аппаратуру i-го ранга поступает с (i + 1)-го ранга, часть команд формируется на i-м ранге, часть функций управления передана на аппаратуру (i— 1)-го ранга. Аппаратура i-го ранга соответственно должна иметь переключатели режимов на три положения с четкой сигнализацией положений. Перевод аппаратуры с режима 1 на режим 2 осуществляется по команде или с разрешения оператора системы вышестоящего ранга. Передача функций управления тем или иным параметром на нижестоящий ранг осуществляется только после приема команды о передаче и подтверждения оператора системы нижестоящего ранга о готовности к принятию на себя тех или иных функций управления (формирования команд). Многоуровневая структура системы управления обеспечивает ее надежность, оперативность, ремонтопригодность. При этом легко решается оптимальный уровень централизации управления с минимальным количеством средств технологического контроля, управления и линий связи между ними. АСУ ТП классифицируются на уровни классов 1, 2 и 3. К классу 1 (АСУ ТП нижнего уровня) относятся АСУ ТП, управляющие агрегатами, установками, участками производства, не имеющие в своем составе других АСУ ТП. К классу 2 (АСУ ТП верхнего уровня) относятся АСУ ТП, управляющие группами установок, цехами, производствами, в которых отдельные агрегаты (установки) имеют свои локальные системы управления, не оснащенные АСУ ТП класса 1. К классу 3 (АСУ ТП многоуровневые) относятся АСУ ТП, объединяющие в своем составе АСУ ТП классов 1, 2 и реализующие согласованное управление отдельными технологическими установками или их совокупностью (цехом, производством). Построение систем автоматизации по уровням управления определяется как требованиями снижения трудозатрат на их реализацию, так и целями (критериями) управления технологическими объектами. В общем случае любая система может быть представлена конструктивной, функц-ой или алгоритмической структурой. В конструктивной структуре системы каждая ее часть представляет собой самостоятельное конструктивное целое. В функц. структуре каждая часть предназначена для выполнения определенной функции, в алгоритмической — для выполнения определенного алгоритма преобразования входной величины, являющегося частью алгоритма функционирования системы в целом. В проектах автоматизации изображают конструктивные структурные схемы с элементами функц. признаков. Полные сведения о функц. структуре с указанием локальных контуров регулирования, каналов управления и технол. контроля приводятся в функц. схемах. Алгоритмические структурные схемы по контурам регулирования крайне необходимы при производстве наладочных работ систем автоматизации. 25.Требования к оформлению структурных схем АСУ ТП и порядок их выполнения. Структурные схемы автоматизации в проектах автоматизации рекомендуется разрабатывать в соответствии с ГОСТ 24.302–80 Система технич. документации на АСУ. Графическое построение схемы должно давать наиболее наглядное представление о последовательности взаимодействия функциональных частей в изделии. На линиях взаимодействия рекомендуется стрелками (по ГОСТ 2. 721-74) обозначать направления хода процессов, происходящих в изделии. На структурной схеме отображаются в общем виде основные решения проекта по функц-ой, организационной и технической структурам АСУ ТП с соблюдением иерархии системы и взаимосвязей между пунктами контроля и управления, оперативным персоналом и технол. объектом управления. Принятые при выполнении структурной схемы принципы организации оперативного управления технол. объектом, состав и обозначения отдельных элементов структурной схемы должны сохраняться во всех проектных документах на АСУ ТП, в которых они конкретизируются и детализируются: функциональных схемах автоматизации, структурной схеме комплекса технических средств (КТС) системы, принципиальных схемах контроля и управления, а также в проектных документах, касающихся организации оперативной связи и организационного обеспечения АСУ ТП. Исходными материалами для разработки структурных схем являются: а) задание на проектирование АСУ ТП; б) принципиальные технол. схемы основного и вспомогат. производств технол. объекта; в) задание на проектирование оперативной связи подразделений автоматизируемого технол. объекта; г) генплан и титульный список технологического объекта. Структурная схема разрабатывается на стадиях «проект» и «рабочий проект». На структурной схеме показывают: а) технол. подразделения автоматизируемого объекта (участки, цехи, производства); б) пункты контроля и управления (местные щиты, операторские и диспетчерские пункты и т. п.); в) технологический (эксплуатационный) персонал и специализированные службы, обеспечивающие оперативное управление и нормальное функционирование технологического объекта; г) основные функции и технические средства (устройства), обеспечивающие их реализацию в каждом пункте контроля и управления; д) взаимосвязь подразделений технологического объекта, пунктов контроля и управления и технологического персонала между собой и с вышестоящей АСУ. Элементы структурной схемы изображаются, как правило, в виде прямоугольников. Отдельные функциональные службы и должностные лица (директор, главный инженер, начальник цеха, начальник смены, мастер и т. п.) допускается изображать на структурной схеме в виде кружков. Внутри прямоугольников, изображающих участки (подразделения) автоматизируемого объекта, раскрывается их производственная структура. На схеме функции АСУ ТП могут указываться в виде условных обозначений, расшифровка которых дается в таблице на поле чертежа. Наименование элементов производственной структуры должны соответствовать технол. части проекта и наименованиям, используемым при выполнении других документов проекта АСУ ТП. Взаимосвязь между пунктами контроля и управления, технологическим персоналом и объектом управления изображается на схеме сплошными линиями. Слияние и разветвление линий показываются на чертеже линиями с изломом. При наличии аналогичных технологических объектов (цехов, отделений, участков и т. д.) допускается раскрывать на схеме структуру управления только для одного объекта. Об этом на схеме даются необходимые пояснения. Структурные схемы выполняются, как правило, на одном листе. Таблица с условными обозначениями располагается на поле чертежа схемы над основной надписью. При большом числе условных обозначений продолжение таблицы помещают слева от основной надписи с тем же порядком заполнения. Рекомендуется использовать для условных изображений линии толщиной 0, 5 мм; для линий связи — 1 мм; для остальных линий — 0, 2 — 0, 3 мм. Размеры цифр и букв для надписей выбирают в соответствии с ГОСТ 2. 304 — 81. Текстовую часть, помещенную на поле чертежа, располагают над основной надписью. 26.Алгоритмическое обеспечение АСУ ТП: терминология и основные понятия, алгоритмы АСУ ТП. Терминология Алгоритм—совокупность предписаний, выполнение которых приводит к решению поставленной задачи. Алгоритм управления — алгоритм, формализующий процесс управления некоторым объектом. Алгоритмизации — процесс получения и формулирования алгоритма. Алгоритмический язык — формальный язык, разработанный для представления алгоритмов. Входной язык — см. «Алгоритмический язык». Буквы - элементарные символы языка. Слова – наименьшие смысловые единицы языка, представляющие собой последовательности букв. Алфавит – набор букв, употребляемых в языке. Выражение – синтаксическая форма, образованная из слов. Идентификатор – произвольная последовательность букв, служащая для обозначения переменных, меток, функций, переключателей, процедур. Описание – словесная характеристика некоторых свойств величин, используемых в программе, служащая для связи этих величин с идентификаторами. Ассемблер – машинно-ориентированный язык программирования. Мнемокод – см. «Ассемблер». Процедурно-ориентированный язык – алгоритмический язык, не привязанный к конкретной ЭВМ (например, ФОРТРАН, АЛГОЛ-60). Проблемно-ориентированный язык – алгоритмический язык, содержащий понятия и методы, связанные с данной областью науки, с определенным классом решаемых задач. Оператор — указание о выполнении некоторых вычислений или операций. Основные понятия Отличительные особенности алгоритмов управления, используемых в АСУ ТП: 1) тесная временная связь алгоритма с управляемым процессом; 2) хранение рабочих программ, реализующих алгоритмы управления в основной (оперативной) памяти УВМ для обеспечения доступа к ним в любой произвольный момент времени; 3) превышение удельного веса логических операций в алгоритмах АСУ ТП над удельным весом арифметических операций; 4) разделение алгоритмов АСУ ТП на функциональные части; 5) реализация на УВМ алгоритмов АСУ ТП в режиме разделения времени. Учет временного фактора в алгоритмах управления сводится к необходимости фиксации времени приема информации в систему, времени выдачи сообщений оператором для формирования управляющих воздействий, прогнозирования состояния объекта управления и т. п. Необходимо обеспечить своевременную обработку сигналов УВМ, связанной с управляемым объектом. Это достигается составлением наиболее эффективных (по быстродействию) алгоритмов, реализуемых на быстродействующих УВМ. Из второй особенности алгоритмов АСУ ТП вытекают жесткие требования к объему памяти, необходимой для реализации алгоритма, т. е. к связности алгоритма. Третья особенность алгоритмов АСУ ТП обусловлена тем, что технологические процессы в большинстве случаев управляются на основе решений, принимаемых по результатам сопоставления различных событий, сравнения значений параметров объекта, проверки выполнения различных условий и ограничений и т. п. Использование четвертой особенности алгоритмов АСУ ТП дает возможность разработчику сформулировать несколько задач АСУ ТП, а затем объединить разработанные алгоритмы этих задач в единую систему. Естественно, что степень взаимосвязи задач АСУ ТП может быть различной и в сильной степени зависит от конкретного объекта управления. Для учета пятой особенности алгоритмов управления необходимо разрабатывать операционные системы реального времени и планировать очередность загрузки модулей, реализующих алгоритмы задач АСУ ТП, и их выполнение в зависимости от приоритетов. При создании АСУ ТП различают следующие алгоритмы: алгоритмы обнаружения событий; алгоритмы анализа ситуаций; алгоритмы подготовки советов и рекомендаций; алгоритм подготовки и принятия решений; алгоритмы вспомогательные. Оформление алгоритмов АСУ ТП, условные обозначения на схемах алгоритмов работы АСУ ТП. Оформление алгоритмов работы АСУ ТП производится в соответствии с ГОСТ 19.701 – 90 ЕСПД (ИСО 5807 - 85) «Схемы алгоритмов, программ, данных и систем». Прежде действовали ГОСТ 19.002 – 80 и ГОСТ 19.003 – 80, которые для сведения приводятся в справочнике ЭУМК. Дадим комментарий ГОСТа. Область применения ГОСТа отражена в его названии. Он может применяться в схемах: 1) алгоритмов; 2) данных; 3) программ; 4) работы системы; 5) взаимодействия программ; 6) взаимодействия ресурсов систем.
Все регламентируемые ГОСТом символы делятся на четыре группы: 1. Символы данных (10 символов). 2. Символы процесса (7 символов). 3. Символы линий (4 символа). 4. Символы специальные (4 символа).
В каждой из 4-х групп есть основные символы и специфические символы. Схемы алгоритмов, программ, данных и систем (далее – схемы) состоят из имеющих заданное значение символов, краткого пояснительного текста и соединяющих линий. Схемы могут использоваться на различных уровнях детализации, причем число уровней зависит от размеров и сложности задачи обработки данных. Уровень детализации должен быть таким, чтобы различные части и взаимосвязь между ними были понятны в целом. В настоящем стандарте определены символы, предназначенные для использования в документации по обработке данных, и приведено руководство по условным обозначениям для применения их в: 1) схемах данных; 2) схемах программ; 3) схемах работы системы; 4) схемах взаимодействия программ; 5) схемах ресурсов системы. В стандарте используются следующие понятия: 1) основной символ-символ, используемый в тех случаях, когда точный тип (вид) процесса или носителя данных неизвестен или отсутствует необходимость в описании фактического носителя данных; 2) специфический символ-символ, используемый в тех случаях, когда известен точный тип (вид) процесса или носителя данных или когда необходимо описать фактический носитель данных; 3) схема-графическое представление определения, анализа или метода решения задачи, в, котором используются символы для отображения операций, данных, потока, оборудования и т.д. Схемы данных отображают путь данных при решении задач и определяют этапы обработки, а также различные применяемые носители данных. Схема данных состоит из: 1) символов данных (символы данных могут также указывать вид носителя данных); 2) символов процесса, который следует выполнить над данными (символы процесса могут также указывать функции, выполняемые вычислительной машиной); 3) символов линий, указывающих потоки данных между процессами и (или) носителями данных; 4) специальных символов, используемых для облегчения написания и чтения схемы. Символы данных предшествуют и следуют за символами процесса. Схема данных начинается и заканчивается символами данных (за исключением специальных символов). Схемы программ отображают последовательность операций в программе. Схема программы состоит из: 1) символов процесса, указывающих фактические операции обработки данных (включая символы, определяющие путь, которого следует придерживаться с учетом логических условий); 2) линейных символов, указывающих поток управления; 3) специальных символов, используемых для облегчения написания и чтения схемы. Схемы работы системы отображают управление операциями и поток данных в системе. Схема работы системы состоит из: 1) символов данных, указывающих на наличие данных (символы данных могут также указывать вид носителя данных); 2) символов процесса, указывающих операции, которые следует выполнить над данными, а также определяющих логический путь, которого следует придерживаться; 3) линейных символов, указывающих потоки данных между процессами и (или) носителями данных, а также поток управления между процессами; 4) специальных символов, используемых для облегчения написания и чтения блок-схемы. Схемы взаимодействия программ отображают путь активации программ и взаимодействий с соответствующими данными. Каждая программа в схеме взаимодействия программ показывается только один раз (в схеме работы системы программа может изображаться более чем в одном потоке управления). Схема взаимодействия программ состоит из: 1) символов данных, указывающих на наличие данных; 2) символов процесса, указывающих на операции, которые следует выполнить над данными; 3) линейных символов, отображающих поток между процессами и данными, а также инициации процессов; 4) специальных символов, используемых для облегчения написания и чтения схемы. Схемы ресурсов системы отображают конфигурацию блоков данных и обрабатывающих блоков, которая требуется для решения задачи или набора задач. Схема ресурсов системы состоит из: 1) символов данных, отображающих входные, выходные и запоминающие устройства вычислительной машины; 2) символов процесса, отображающих процессоры (центральные процессоры, каналы и т.д.); 3) линейных символов, отображающих передачу данных между устройствами ввода-вывода и процессорами, а также передачу управления между процессорами; 4) специальных символов, используемых для облегчения написания и чтения схемы.
Описание символов
Основные символы данных Данные Символ отображает данные, носитель данных не определен.
Запоминаемые данные Символ отображает хранимые данные в виде, пригодном для обработки, носитель данных не определен.
|
||
|
|
Последнее изменение этой страницы: 2017-01-26; просмотров: 3767; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.214 (0.011 с.) |