Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Технологии съемок комплексами глобальныхСодержание книги
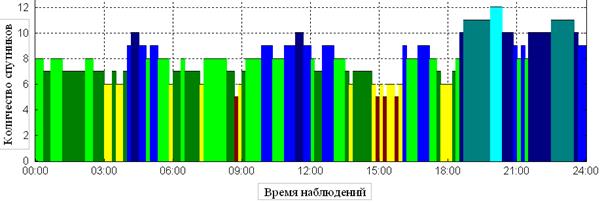
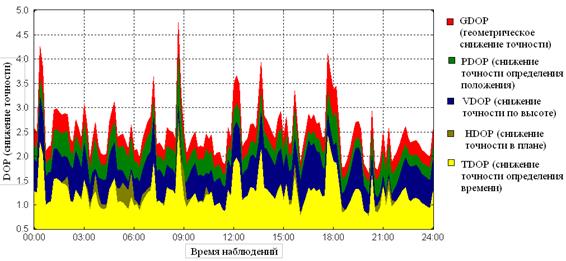
Поиск на нашем сайте Спутниковых систем Технологическая схема производства глобальных навигационных спутниковых систем в общем виде включает [19]:· подготовительные работы;· полевые измерения;· камеральную обработку полевых измерений;· оценку точности измерений. В состав подготовительных работ входят: - составление прогноза видимости спутников на участке работ; - предварительный расчет геометрического фактора; - определение рационального времени проведения съемочных работ; - составление схемы передвижения между определяемыми точками маршрута; - подготовка каталога координат точек маршрутов с занесением их в накопитель данных (контроллер). Составление прогноза видимости спутников позволяет определить интервалы времени непрерывной видимости заданного числа спутников на участке съемочных работ. Составление прогноза видимости спутников и расчет геометрического фактора производится на основе альманаха, принимаемого навигационной аппаратурой пользователя. Также альманах может быть загружен с использованием ресурсов глобальной сети Интернет, например, с официального сайта фирмы «Trimble» (http://www.trimble.com/gpsdataresources.shtml). Расчет видимости спутников и параметров геометрического фактора производится в вычислительном устройстве самого приемника или на персональном компьютере. Выполнение расчета на компьютере предпочтительнее, так как позволяет быстро выявить все необходимые сведения о состоянии созвездия навигационных спутников с распечаткой (при необходимости) этих сведений на принтере. Для расчета видимости спутников и геометрического фактора кроме альманаха в память вычислительного устройства приемника должны быть занесены: дата и время выполнения работ, приблизительные географические координаты района работ, высота, маска по возвышению спутников.Большое значение при планировании спутниковых съёмок имеет правильный выбор минимального значения маски угла возвышения. При установленной маске угла возвышения приемник начинает вести приём радиосигнала не от всех спутников, а только от тех, угол возвышения которых больше или равен маске угла возвышения. Это позволяет избежать влияния атмосферных эффектов и интерференции радиоволн, вызванной близко расположенными объектами. В соответствии с инструктивно-норматив-ными документами [8, 20] не рекомендуется наблюдать спутники, возвышение которых над горизонтом составляет менее 15º, т. к. в противном случае полученные данные будут значительно искажаться влиянием атмосферной рефракции. В работе [16] указывается, что для рядовых работ маска угла возвышения обычно принимается равной 15º, а для особо ответственных – 17-21º. Например, планирование полевых работ с применением аппаратуры фирмы «Trimble» выполняется в программном пакете «Trimble Geomatics Office» с использованием утилиты «Planning». Выбор времени наблюдений осуществляется на основе графиков «Количество наблюдаемых спутников» (рис. 4.27) и «Показатели точности наблюдений» (рис. 4.28). Показатель DOP является индикатором качества GPS-определений координат точек, учитывающий расположение каждого спутника относительно других спутников созвездия и их расположение относительно GPS-приёмника.
Рис. 4.27. Количество наблюдаемых спутников
Рис. 4.28. Показатели точности наблюдений Низкое значение DOP указывает на более высокую вероятность получения результатов с высокой точностью. Различают следующие коэффициенты потери точности в определении координат и времени, связанные с конфигурацией (геометрией расположения) наблюдаемых спутников [2]: PDOP− коэффициент потери точности совокупного определения местоположения; GDOP−коэффициент потери точности геометрического (по вектору положения) местоположения; HDOP− коэффициент потери точности определения горизонтального (планового) местоположения; VDOP− коэффициент потери точности определения вертикального (высотного) местоположения; TDOP− коэффициент потери точности определения времени. Одним из основных показателей точности является критерий точности определения положения точки PDOP. Геометрически величина PDOP обратно пропорциональна объёму пирамиды, образованной линиями, исходящими из приёмника до четырёх наблюдаемых спутников. Численно считается, что значения PDOP, лежащие в пределах от 1 до 7, являются хорошими для производства топографо-геодезических работ, в эти интервалы времени рекомендуется производить спутниковые определения координат, а значения PDOP большие 7 – плохие, и в этот период времени необходимо воздержаться от выполнения спутниковых измерений. При выполнении высокоточных геодезических работ значения PDOP не должны превышать 3 – 4. Предельное значение фактора PDOP, принятое для определенного вида работ, называется маской PDOP, приемник спутниковых сигналов постоянно вычисляет значение фактора PDOP, и если его значение начинает превышать заранее установленное значение маски, то приемник прекращает запись спутникового радиосигнала во внутреннюю память до тех пор, пока значение PDOP не снизится до допустимых значений [16]. Подготовка координат заключается в выборке их значений из каталогов или снятии с топографических карт масштабов 1:10000 – 1:50000 (в зависимости от требуемой точности), перевычислений координат в рабочую систему координат приемника, занесении в библиотеку путевых точек приемника. Занесение координат точек в память приемника производят вручную с использованием контроллера или из компьютера через порт связи. В последнем случае координаты должны быть записаны в файле в соответствующем формате. Типичная последовательность действий в рамках проекта по выполнению полевых измерений, камеральной их обработки и оценки точности показана на рис. 4.29 [21]. Рис. 4.29. Методика GPS-обработки При спутниковых наблюдениях, например, в режиме статики, как правило, используются следующие стандартные установки приёмников: интервал записи измерений 5 секунд, ограничения по возвышению спутников 15 градусов, время сбора данных при приёме с 6 и более спутников 8 минут. Существенное влияние на точность спутниковых определений оказывают: время накопления информации на точке, выбор времени измерений в соответствии с расчетом видимости достаточного количества спутников и параметров геометрического фактора, закрытие видимости на отдельные спутники деревьями или искусственными сооружениями. В работе [10] приводится следующая классификация способов определения координат объектов посредством спутниковых навигационных систем:· абсолютные (безотносительные) способы определения геоцентрических координат:- автономный (autonomous);- дифференциальные (кодовые DGPS и фазовые PDGPS определения);· относительные способы определения пространственных векторов – базовых линий (relative, baselines):- статические:ü ускоренная статика (fast, rapid statics);ü псевдостатика (pseudostatics, reoccupation);- кинематические (kinematics):ü непрерывная (continuous), постобработка;ü «стой и иди» (Stop and Go), постобработка;ü реального времени (Real Time K – RTK). Метод абсолютных определений предполагает получение координат в единой системе, носителем которой является комплекс станций наземной подсистемы контроля и управления. Автономные определения выполняются по принципу пространственной обратной линейной засечки, образованной измеренными псевдодальностями до 4-х и более спутников с одной точки, на которой размещён спутниковый приёмник. Точность автономных определений местоположения ограничена рядом факторов, среди которых основным является влияние погрешностей эфемерид спутников и в среднем составляет 5 м [10, 20]. В дифференциальном способе измерения одновременно выполняются двумя приёмниками. Один приёмник (базовый – base) ставится на пункте с известными координатами, а другой приёмник (подвижный – rover), размещается над определяемой точкой. Поскольку координаты базовой станции известны, то их можно использовать для сравнения с вновь определяемыми и находить на этой основе поправки для подвижной станции. При выполнении коррекции координат (координатный способ) непосредственно корректируются координаты мобильной станции. Поправки получают на базовой станции как разности между истинными (эталонными) и определяемыми спутниковым приёмником координаты. Необходимым условием реализации координатного способа является использование идентичных созвездий навигационных спутников для вычисления местоположения на опорном и определяемом пунктах. При полном развертывании орбитальных группировок спутниковых систем (когда одновременно в зоне видимости СП могут находиться более четырех НИСЗ), выполнение условия относительно продолжительного совпадения рабочих созвездий НИСЗ на опорном и определяемом пунктах становится затруднительным из-за довольно частой смены НИСЗ в созвездии (при заданном геометрическом факторе). Поэтому реализация координатного способа относительных определений трудновыполнима. При выполнении коррекции первичных навигационных параметров (псевдодальностей, псевдоскоростей) на базовой станции вычисляются поправки к измеренным навигационным параметрам по всем видимым НИСЗ. Для этого одновременно с измерениями навигационных параметров находят их расчетные значения, используя данные эфемерид и истинные координаты базовой станции. Разности между измеренными и расчетными значениями используются в качестве дифференциальных поправок.При кодовых измерениях поправки дифференциальной коррекции вычисляются как разности между истинными и определяемыми значениями координат базовой (опорной) станции или как разности псевдодальностей, вычисленных по координатам и измеренных на базовой станции. Дифференциальные поправки передаются на подвижный приёмник при помощи радио или сотовой связи и вводятся в координаты или псевдодальности, полученные на определяемом пункте. Поправки могут вводиться и в режиме постобработки – окончательной обработке данных в камеральных условиях с целью получения координат пунктов. Точность дифферен-циального позиционирования на основе кодовых измерений составляет 5 – 7 м. Дифференциальные коррекции применяют и к фазовым измерениям. Существует два варианта передачи поправок: в форме необработанных измерений фазы и в форме поправок к фазе несущей. Коррекции к фазовым дальностям повышают точность до уровня 1-5 см (PDGPS) [3]. Геодезические приёмники обычно имеют вход, позволяющий принимать в форматах RTCM (Radio Technical Comission for Maritime Services) SC-104 поправки в псевдодальности по каждому спутнику. Наличие RTCM-выхода, в свою очередь, даёт возможность использовать приёмник в качестве базового для генерирования и трансляции по дополнительному цифровому радиоканалу поправок на другие приёмники. Для передачи дифференциальных поправок используется средневолновый (275-2000 кГц) и УКВ (390-1550 МГц и 3-300 ГГц) радиоканалы. Существуют сотни базовых станций, расположенных в разных странах мира, передающие дифференциальные коррекции в стандартном международном формате RTCM SC-104. Например, работают в Германии – 5, Нидерландах – 5, Финляндии – 11, Швеции – 21 станция. С 1998 г. действует бесплатная открытого пользования DGPS станция под Санкт-Петербургом. Она передаёт дифференциальные поправки в международном формате на частоте 298,5 кГц на расстояния до 150 км на суше и до 300 км на море. Опытная базовая станция действует в Москве на территории ГАИШ МГУ им. М.В. Ломоносова. В настоящее время широкое развитие в мире получили различные навигационные дифференциальные подсистемы. Их условно подразделяют [10]: - локальные; - региональные; - широкозонные или глобальные. Локальные навигационные дифференциальные подсистемы имеют зону действия в радиусе 50 – 200 км от контрольно-корректирующей станции. В ряде стран созданы специальные активные сети базовых станций. Так, на территории Германии действует 260 базовых станций службы SAPOS, расстояния между станциями от 10 до 50 км. С 2004 г. в Москве и Московской области функционирует спутниковая система межевания земель (ССМЗ) в составе 22 базовых (референцных) станций и вычислительного центра (ВЦ). Базовые станции располагаются на расстоянии от 30 до 80 км. В сети ССМЗ дифференциальные поправки получают с ВЦ системы, которые программное обеспечение интерполирует по нескольким базовым пунктам, т.е. применяется сетевая структура коррекции данных [13]. ССМЗ обеспечивает определение координат объектов в режиме реального времени со средней квадратической ошибкой 2 – 3 см в пределах Московской области на площади свыше 50 тыс. кв. км. С использованием режима постобработки на территории Московской области достигается миллиметровая точность определения координат, а для областей, прилегающих к Московской, на расстоянии 150 – 200 км от ближайших референцных станций – сантиметровая точность [22]. Аналогичные спутниковые системы межевания земель создаются в северо-западном регионе (Санкт-Петербург, Ленинградская и Новгородская области), Красноярском крае и других областях. Рабочая зона региональных навигационных дифференциальных подсистем простирается от 400-500 до 2000 км. Они могут иметь одну или несколько контрольно-корректирующих станций. В европейских странах созданы подсистемы, формирующие дифференциальные поправки: LandSTAR, EuroFix, Startfix и другие. В качестве примера можно привести спутниковую дифференциальную подсистему Startfix с дальностью действия свыше 2000 км, с 60 наземными контрольно-корректирующими станциями и четырьмя геостационарными спутниками, расположенными на высоте около 36000 км над уровнем моря. Геостационарная орбита – круговая орбита, расположенная над экватором Земли (00 широты), находясь на которой искусственный спутник обращается вокруг планеты с угловой скоростью, равной угловой скорости вращения Земли вокруг оси, и постоянно находится над одной и той же точкой на земной поверхности. Заявленная точность 1 – 2 м на дальностях до 1000 км и 3 м на дальностях свыше 2000 км [10]. В 2004 г. в Харькове и Баку введены в действие региональные навигационные дифференциальные подсистемы. При удалении от дифференциальных станций до 1000 км точность определения координат составляет 0,5 – 2 м. Однако на большинстве территорий действия системы обеспечивается дециметровая точность даже при использовании кодовых приёмников [5]. Основой широкозонных навигационных дифференциальных подсистем является сеть наземных контрольно-корректирующих станций, ведущих мониторинг за состоянием сигналов навигационных спутников. С них проводятся двухчастотные измерения псевдодальностей для всех навигационных спутников систем. Информация передаётся на главную станцию, где обрабатывается, определяются дифференциальные поправки к эфемеридным данным, шкалам времени, параметрам ионосферной модели. Эти поправки через станции передачи данных передаются на геостационарные космические аппараты, которые передают данные дифференциальные поправки, а также GPS-подобный сигнал пользователям (в диапазоне L1 на частоте 1575,42 МГц). Дополнительные измерения псевдодальностей до геостационарных космических аппаратов повышает точность и надёжность навигационных определений. Размер зоны действия широкозонных навигационных дифференциальных подсистем составляет около 5000 км. Существуют следующие широкозонные навигационные дифференциальные подсистемы [13]:· WAAS (Wide Area Augmentation System) – американская дифференциальная подсистема, обеспечивающая северо-американский континент и Северную Атлантику;·EGNOS (Europen Geostationary Navigation Overlay System) – европейская дифференциальная подсистема, охватывающая европейскую и часть азиатской зоны России;· MAAS (Multi-Transport Satellite based Augmentation System) – многофункциональная широкозонная дифференциальная подсистема Японии, обеспечивающая регион Японии и Тихого океана между Азией и Америкой, большую часть азиатской территории Российской Федерации;· GNSSПримером глобальной навигационной дифференциальной подсистемы может служить система OmniSTAR. Она использует распределённую по всему миру сеть станций для сбора информации со спутников GPS. Собранные данные передаются в три центра управления, откуда транслируются на борт одного из семи геостационарных спутников. Каждый спутник в пределах своей зоны обслуживания передаёт дифференциальные поправки пользователям. Зона действия OmniSTAR охватывает весь мир, за исключением Гренландии, Канады и большей части России [10]. Методы относительных определений основаны на принципе компенсации сильно коррелированных погрешностей (к которым относятся и эфемеридные погрешности) при одновременном определении кодовых и фазовых псевдодальностей до спутников одного и того же созвездия с двух точек. Данные методы выполняются посредством навигационных спутников и как минимум двух приемников сигналов, один из которых совмещен с определяемым объектом, а второй устанавливается на опорном пункте с известными координатами, например A и B. Дифференциальные коррекции не определяют, а формируют разности из наблюдений на станциях, на основе которых вычисляют соединяющий эти станции пространственный вектор [10]: . Базовая станция должна иметь точные координаты, чтобы по измеренным приращениям можно было бы вычислить координаты остальных пунктов геодезической сети. Спутниковые определения относительными методами обеспечивают определение плановых координат и высот в системе координат и высот пунктов геодезической основы. В статическом режиме определение координат производится на неподвижном основании в течение некоторого времени (от минут до часов) с последующей математической обработкой многократных измерений. Кинематический режим предполагает выполнение спутниковых определений в движении. В этом режиме необходима точная привязка определяемых координат к шкале единого времени. Динамический режим отличается от кинематического тем, что спутниковый приёмник синхронно работает в комплексе с другой навигационной аппаратурой, например, использующей информацию от инерциальных датчиков. В зависимости от времени получения дифференциальных поправок при использовании относительного метода различают два основных способа спутниковых определений: получение скорректированных координат в процессе совместной камеральной обработки (постобработки) измерений на опорном и определяемом пунктах (псевдодифференциальный) и в реальном масштабе времени. При псевдодифференциальном способе следует записать измеренные данные в накопитель и затем при камеральной обработке скорректировать ранее накопленные измерения. Если точные координаты необходимы на данный момент, то следует использовать дифференциальный режим в реальном времени. В этом случае поправки непрерывно вычисляются на опорной станции и передаются на мобильную станцию по каналу радиосвязи. Если точное местоположение мобильной станции нужно знать на опорной станции, то применим инверсный дифференциальный режим в реальном времени. При этом координаты мобильной станции по радиоканалу передаются на опорную станцию, где уточняются. Камеральная обработка спутниковых определений, выполненных абсолютным методом в статическом режиме, включает: осреднение накоплений на определяемых точках; перевычисление координат в систему относимости, принятую для данной съемки; оценку точности; формирование каталога координат, в том числе подготовку данных для программ последующей обработки. Обработка определений, выполненных абсолютным методом в кинематическом режиме, включает: перевычисление координат; формирование каталогов для программ последующей обработки; вывод графической информации. Обработка спутниковых определений, выполненных относительным методом с постобработкой информации, проводится в такой последовательности: перезапись файлов полевых накоплений в директорию с файлами базовой станции для совместной обработки; определение варианта фильтрации измеренных величин и других параметров обработки; управление программами обработки; подготовка каталога координат для программ последующей обработки (при необходимости в комплексе с геолого-геофизической информацией). При оценке качества измерений и оптимизации результатов обработки GPS-определений используются следующие информационные показатели [21]:· тип решения;· отношение;· коэффициент дисперсии;· СКО (RMS);· сводки отслеживания на станциях и объединённая сводка;· графики поправок навигационных спутников. Для оценки точности спутниковых определений выполняют контрольные измерения на геодезических пунктах с известными координатами, а также повторные измерения на тех же пунктах. По завершении полевых и камеральных работ сдаче подлежат: материалы полевых измерений; материалы камеральных работ; схема района работ; каталоги координат точек наблюдений; пояснительная записка. . Базовая станция должна иметь точные координаты, чтобы по измеренным приращениям можно было бы вычислить координаты остальных пунктов геодезической сети. Спутниковые определения относительными методами обеспечивают определение плановых координат и высот в системе координат и высот пунктов геодезической основы. В статическом режиме определение координат производится на неподвижном основании в течение некоторого времени (от минут до часов) с последующей математической обработкой многократных измерений. Кинематический режим предполагает выполнение спутниковых определений в движении. В этом режиме необходима точная привязка определяемых координат к шкале единого времени. Динамический режим отличается от кинематического тем, что спутниковый приёмник синхронно работает в комплексе с другой навигационной аппаратурой, например, использующей информацию от инерциальных датчиков. В зависимости от времени получения дифференциальных поправок при использовании относительного метода различают два основных способа спутниковых определений: получение скорректированных координат в процессе совместной камеральной обработки (постобработки) измерений на опорном и определяемом пунктах (псевдодифференциальный) и в реальном масштабе времени. При псевдодифференциальном способе следует записать измеренные данные в накопитель и затем при камеральной обработке скорректировать ранее накопленные измерения. Если точные координаты необходимы на данный момент, то следует использовать дифференциальный режим в реальном времени. В этом случае поправки непрерывно вычисляются на опорной станции и передаются на мобильную станцию по каналу радиосвязи. Если точное местоположение мобильной станции нужно знать на опорной станции, то применим инверсный дифференциальный режим в реальном времени. При этом координаты мобильной станции по радиоканалу передаются на опорную станцию, где уточняются. Камеральная обработка спутниковых определений, выполненных абсолютным методом в статическом режиме, включает: осреднение накоплений на определяемых точках; перевычисление координат в систему относимости, принятую для данной съемки; оценку точности; формирование каталога координат, в том числе подготовку данных для программ последующей обработки. Обработка определений, выполненных абсолютным методом в кинематическом режиме, включает: перевычисление координат; формирование каталогов для программ последующей обработки; вывод графической информации. Обработка спутниковых определений, выполненных относительным методом с постобработкой информации, проводится в такой последовательности: перезапись файлов полевых накоплений в директорию с файлами базовой станции для совместной обработки; определение варианта фильтрации измеренных величин и других параметров обработки; управление программами обработки; подготовка каталога координат для программ последующей обработки (при необходимости в комплексе с геолого-геофизической информацией). При оценке качества измерений и оптимизации результатов обработки GPS-определений используются следующие информационные показатели [21]:· тип решения;· отношение;· коэффициент дисперсии;· СКО (RMS);· сводки отслеживания на станциях и объединённая сводка;· графики поправок навигационных спутников. Для оценки точности спутниковых определений выполняют контрольные измерения на геодезических пунктах с известными координатами, а также повторные измерения на тех же пунктах. По завершении полевых и камеральных работ сдаче подлежат: материалы полевых измерений; материалы камеральных работ; схема района работ; каталоги координат точек наблюдений; пояснительная записка.
|
||
|
|
Последнее изменение этой страницы: 2017-01-26; просмотров: 300; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.102 (0.01 с.) |