Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Высотное съемочное обоснование
Высотное обоснование маркшейдерских съемок в карьере создается одновременно с плановым. Исходными пунктами по определению высотных отметок пунктов съемочного обоснования являются пункты опорных высотных сетей III, IV классов. Высотные отметки пунктов съемочного обоснования в карьере определяются геометрическим нивелированием IV класса, техническим нивелированием или тригонометрическим способом. Для технического нивелирования применяются нивелиры класса точности Н10 и выше. Нивелирные ходы прокладываются между исходными пунктами в одном направлении, висячие ходы – от исходного пункта в прямом и обратном направлениях. Расстояния до реек на связующих точках по возможности должны быть равными и не превышать 150 м. Допустимая разность в превышениях, определенных при двух горизонтах инструмента или по черной и красной сторонам рейки – 5 мм. Предельная высотная невязка хода Производство тригонометрического нивелирования включает измерение вертикального угла d, наклонного расстояния l, высоты инструмента
 Превышение определяется по формуле Превышение определяется по формуле
где d – горизонтальное, l – наклонное расстояния между пунктами, м.
где По результатам исследований известно, что в течение дня коэффициент рефракции изменяется от -0,22 перед восходом и до -0,10 перед заходом Солнца. Для сравнительно коротких расстояний (до 3 км) среднее значение k ср = -0,16. Тогда суммарная поправка за кривизну Земли и рефракцию В табл. 4.1 приведены суммарные поправки f для различных расстояний. Таблица 4.1 Суммарные поправки f
Рабочая формула для вычисления превышения с учетом поправки f примет вид:
Вертикальные углы измеряются теодолитом класса точности Т30 двумя приемами, Т15 и выше – одним приемом. Высота инструмента и сигнала определяется рулеткой с округлением до миллиметров, длины – светодальномером. Ходы тригонометрического нивелирования опираются на пункты опорных сетей не ниже IV класса общей протяженностью не более 2,5 км. Превышение для каждой стороны определяется дважды в прямом и обратном направлениях. Допустимое расхождение в превышениях 0,04 l, см, всего хода – 0,004
4.2. Применение спутниковой геодезии на карьерах и разрезах
4.2.1. Основные положения спутниковой геодезии Появление искусственных спутников Земли произвело переворот в методах геодезии и значительно повысило точность навигации и определения положения точек и объектов на поверхности Земли. С созданием радиолокационных станций стало возможным измерять параметры движения и относительное местоположение спутника по отражённому от его поверхности лучу радиолокатора. Появилась возможность измерения параметров движения спутника по излучаемому сигналу. В 1957 году в СССР группа учёных под руководством В.А. Котельникова экспериментально подтвердила возможность определения параметров движения искусственного спутника Земли (ИСЗ) по результатам измерений доплеровского сдвига частоты сигнала, излучаемого этим спутником. При этом была установлена возможность решения обратной задачи – нахождения координат приёмника по измеренному доплеровскому сдвигу сигнала, излучаемого с ИСЗ, если параметры движения и координаты этого спутника известны. Эффект Доплера заключается в том, что при относительном перемещении приёмника или передатчика частота принимаемого сигнала изменяется [7]:
где При измерении разностей расстояний на основе эффекта Доплера по разностной частоте определяется относительная скорость
Появление атомных часов в 1960 году позволило создать для целей навигации сеть точно синхронизированных передатчиков, передающих кодированные сигналы. Координаты приёмника определялись по временным задержкам сигнала. В 1964 году в США началось исследование возможностей использования для целей местоопределения широкополосных сигналов, модулированных псевдослучайными шумовыми кодами, что на основе корреляционного разделения таких сигналов давало возможность использования несколькими передатчиками одной несущей частоты. Основной принцип спутниковой геодезии – это использование трилатерации, т. е. измеряются расстояния до спутников, являющихся точками отсчёта для вычисления координат на Земле. Для определения местоположения на земной поверхности измеряют расстояние между наземным пунктом и спутником, а также скорость изменения этого расстояния при прохождении спутника. Расстояния рассчитывают, исходя из времени, которое затрачивает электромагнитный сигнал (лазерная вспышка или радиоимпульс) на прохождение пути от спутника до принимаемой станции при условии, что скорость распространения сигнала известна. Скорость изменения расстояния между спутником и принимающей станцией определяется по величине наблюдаемого доплеровского сдвига частоты – изменения частоты сигнала, поступающего со спутника. Вводятся поправки за атмосферную задержку сигнала и рефракцию [7]. В настоящее время наиболее прогрессивными средствами навигационно-геодезического обеспечения являются глобальные навигационные спутниковые системы (ГНСС) среднеорбитального типа ГЛОНАСС (Россия) и GPS NAVSTAR (США). Основные сравнительные характеристики ГЛОНАСС и GPS приведены в табл. 4.2 [8]. В дополнение к ГНСС ГЛОНАСС (Россия) и GPS NAVSTAR (США) Европейский Союз с 1999 г. приступил к разработке спутниковой радионавигационной системы Galileo (ЕС). Опытное использование системы Galileo было начато в 2005 г. запуском космического аппарата GIOVE-A (Galileo In-Orbit Validation Element). Проектное число спутников составляет 30 (из них 3 в резерве), расположенных на высоте 23200 км в трёх орбитальных плоскостях, наклонённых на 560 к плоскости экватора. С учётом спутников ГЛОНАСС и GPS NAVSTAR в распоряжении пользователей будет 80 космических аппаратов, опоясывающих весь земной шар [10].
Таблица 4.2 Основные технические характеристики глобальных навигационных спутниковых систем ГЛОНАСС и GPS NAVSTAR
Примечание. * - Состав группировки космических навигационных спутников на 1.03.2009 г. по данным Федерального космического агентства «Информационно-аналитический центр» [14].
В соответствии с действующими правилами по терминологии в области спутниковых технологий геодезических работ РТМ 68 - 14 – 01 [11] глобальная навигационная спутниковая система (ГНСС) – это система, состоящая из созвездия навигационных спутников, службы контроля и управления и аппаратуры пользователей, позволяющая определять местоположение (координаты) антенны приемника потребителя.
Созвездие спутников – совокупность расположенных в пространстве всех спутников входящих, в ГНСС, которые излучают радиосигналы, содержащие навигационную информацию, приём которой необходим для определения местоположения приемника потребителя. Часть ГНСС, состоящая из созвездия навигационных спутников является космическим сегментом. Орбитальные группировки ГЛОНАСС и GPS NAVSTAR состоят из спутников, которые вращаются вокруг Земли по практически круговым орбитам. Спутники в GPS NAVSTAR расположены в шести, а в ГЛОНАСС – в трёх плоскостях развёрнутых, соответственно, через 600 и через 1200 по долготе восходящего узла (рис. 4.13).

Рис. 4.13. Созвездия искусственных спутников: а)ГЛОНАСС; б) NAVSTAR GPS Если все спутники системы перевести в одну плоскость, то они расположатся равномерно через 150 [10]. Такое количество спутников и их расположение обеспечивают одновременный прием сигналов как минимум от четырех спутников в любой точке Земли в любое время. На каждом спутнике GPS NAVSTAR и ГЛОНАСС установлены солнечные батареи питания, приемно-передающая аппаратура, эталоны частоты и времени, бортовые компьютеры и уголковые отражатели для лазерной дальнометрии. Внешний вид навигационных спутников показан на рис. 4.14 [12].
Рис. 4.14. Навигационный спутник а) ГЛОНАСС; б) NAVSTAR GPS
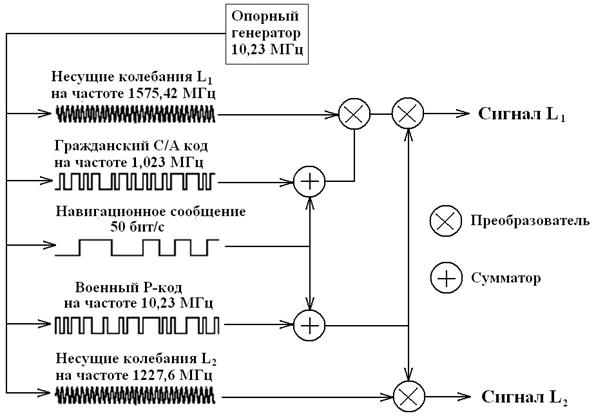
Питание всех подсистем производится от солнечных батарей, ширина которых в раскрытом виде составляет 7,23 метра. Служебные системы и специальная аппаратура спутника расположены в цилиндрическом гермоконтейнере диаметром 1,35 метра. Если рассматривать навигационный спутник в положении штатной ориентации, то в нижней части находится платформа с антенно-фидерными устройствами и уголковыми отражателями, а в верхней – топливные баки и штанга магнитометра [13]. Навигационный спутник снабжен кварцевым стандартом частоты, двумя цезиевыми и двумя рубидиевыми стандартами частоты, которые поддерживают стабильность часов спутника в пределах 1·10-12…1·10-13. Цезиевые и рубидиевые стандарты частоты координируют и управляют основной частотой – кварцевым стандартом частоты, генерирующим 10,23 МГц. Из основной частоты формируют две частоты L- диапазона, МГц [6]:
L1 = 10,23·154 = 1575,42 (длина волны 19,05 см); L2 = 10,23·120 = 1227,60 (длина волны 24,45 см). Эти две частоты (называемые несущими) через модуляторы поступают на антенну и передают на Землю информацию. Для измерения расстояний формируют специальные дальномерные коды, представляющие собой псевдослучайные чередования нулей и единиц. Такие коды вырабатывают на спутниках и в приёмнике пользователя. Со спутника их передают на Землю. Для переноса на Землю их встраивают в колебания высокой частоты, излучаемые космическим аппаратом и называемые несущими. Информация накладывается на несущую частоту методом импульсно-фазовой модуляции [10]. Модуляция сигнала – это изменение какого-либо параметра электрического сигнала (при амплитудной модуляции изменяется амплитуда сигнала, а при частотной – частота сигнала). При импульсно-фазовой модуляции фаза сигнала изменяется скачком на 1800 (рис. 4.15).
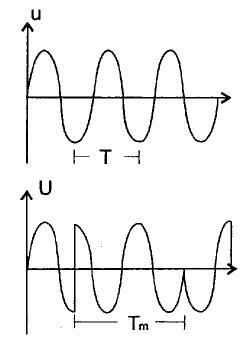
Рис. 4.15. Импульсно-фазовая модуляция: а – несущий сигнал с периодом колебаний T (сигнал до модуляции); б – модулированный сигнал, Tm промежуток времени между смежными перебросами фазы на 180° (сигнал после модуляции).
На частотах L1 и L2 навигационные сигналы и другая навигационная и системная информация передаются посредством предварительного её преобразования в двоичный код, и в моменты смены в кодах 0 на 1 или 1 на 0 фаза несущего колебания перебрасывается на 1800. В системе NAVSTAR GPS все спутники излучают на двух одинаковых частотах L - диапазона (L1 и L2), но каждый спутник излучает свой личный код (индивидуальная последовательность переключения фазы на 180°), по которому ведется распознавание спутников. В российской системе ГЛОНАСС спутник излучает на своей частоте, а код общий для всех спутников. Российские спутники передают информацию на двух частотах: L1 = f01 + k D f1; L2 = f02 + k D f2,
где f01 = 1602 МГц; f02 = 1246 МГц; k – номер спутника (k = 0, 1,2...); D f1 = 0,4375 МГц; D f2 = 0,5625 МГц. Отношение частот L1 и L2 равно 9/7. В системе NAVSTAR GPS частота L 1 (1575.42 MHz) модулируется двумя видами кодов [7]: C/A кодом (кодом свободного доступа) и P - кодом (кодом санкционированного доступа). Частота L 2 (1227.60 MHz) модулируется только P-кодом. В российской системе ГЛОНАСС аналогичные коды получили название узкополосной (СТ - код) и широкополосной (ВТ - код) псевдослучайной последовательности. Кроме того, обе несущие частоты дополнительно кодируются специальным навигационным сообщением. Схема модуляции спутникового радиосигнала представлена на рис. 4.16. В настоящее время производится модернизация системы GPS, в результате проведения которой гражданские пользователи смогут принимать дополнительные сигналы: C/A код на частоте L 2 и новый сигнал на частоте L 5, что улучшит работу пользователей в приложениях, связанных с высокоточными измерениями на длинных и коротких базовых линиях – таких как обеспечение точного захода самолетов на посадку и автоматическое приземление, картографирование, геодезические и геофизические измерения и многих других.
Согласно календарному плану выполнения работ по модернизации системы NAVSTAR GPS ожидается трансляция сигнала L5 с 18 спутников ориентировочно в 2012 году. Средства передачи третьего гражданского сигнала на частоте 1176.45 МГц (L5) будут установлены на первом спутнике серии Block IIF, производства фирмы Боинг (Boeing), так же как и для передачи C/A-кода на частоте L2 и M-кода на частотах L1 и L2, как показано на рис. 4.17 [14].
Рис. 4.16. Схема модуляции спутникового радиосигнала В системе NAVSTAR GPS
Рис. 4.17. Модернизация системы NAVSTAR GPS Всего на частотах L 1 и L 2 передаются три вида кодовых данных: Гражданский Р код это псевдослучайный радиошум (PRN), который передается на частоте 1,023 MHz. Этот код повторяется каждую миллисекунду. Уравнения для раскодирования C/A кода известны и общедоступны, поэтому C/A код доступен для гражданского применения. Этот код используется большинством гражданских приемников для целей навигации, геодезии и картографии. Гражданский C/A код модулируется на частоте L 1. Военный P - код это второй псевдослучайный радиошум (PRN), который модулируется в GPS сигнал и передается на частоте 10.23 MHz. Этот сигнал повторяется каждые 267 дней. Этот циклический период делится на 38 семидневных сегментов. Шесть из них зарезервированы для целей управления и не используются. Оставшиеся семидневные сегменты присвоены различным спутникам, поэтому каждый спутник имеет уникальный код, ассоциированный только с ним. Так как P - код одновременно передается на частотах L 1 и L 2, то этим частично компенсируется ошибка задержки радиосигнала в ионосфере, поэтому точность определения координат с использованием P - кода на порядок выше. До недавнего времени уравнения для декодирования Р - кода были засекречены, однако в результате утечки секретной информации уравнения для расшифровки P-кода стали доступны широкому кругу специалистов. В связи с этим американское оборонное ведомство приняло меры дополнительной защиты P - кода: в любой момент времени без предупреждения может быть включен режим AS (Anti Spoofing). При этом выполняется дополнительное кодирование P - кода, и он превращается в Y - код. Расшифровка Y - кода возможна только аппаратно, с использованием специальной микросхемы (криптографического ключа). Спутниковое навигационное сообщение это особый низкочастотный радиосигнал, который передается 50 раз в секунду. Навигационное сообщение содержит описание GPS спутниковых орбит, коэффициенты коррекции бортовых часов спутников, информацию о параметрах атмосферы и другие системные параметры. Эти декодированные данные также называют эфемеридами спутников. Эфемериды используются при планировании работ с применением GPS оборудования и для определения пространственных координат. Спутниковое навигационное сообщение передается на частотах L 1 и L 2. Созвездия ГЛОНАСС и NAVSTAR GPS полного состава обеспечат непрерывную глобальную навигацию военных и гражданских потребителей за счёт использования двух типов сигналов: стандартной точности для гражданских потребителей и высокой точности для военных потребителей. Сегмент наземного контроля и управления – часть Глобальной навигационной спутниковой системы (ГНСС), состоящая из расположенной на земле сети станций слежения за спутниками, равномерно размещенных по территории страны, службы точного времени, главной станции с вычислительным центром и станцией загрузки данных на борт спутников. С пунктов слежения дважды в сутки лазерным дальномером измеряются расстояния до каждого из спутников. Собранную информацию о положении спутников на орбитах (эфемеридах) передают на бортовой компьютер каждого спутника. Наземные передающие антенны расположены так, что каждый спутник ежедневно имеет, по крайней мере, три сеанса связи с системой слежения. Схема обновления бортовых эфемерид спутников приведена на рис. 4.18.
Рис. 4.18. Измерение, прогнозирование и обновление эфемерид спутника
Спутники непрерывно излучают для пользователей измерительные радиосигналы, данные о системном времени, свои координаты и другие сведения. Расположение мониторинговых станций приведено на рисунках 4.19 и 4.20 [15]. Сегмент пользователя – часть ГНСС, состоящая из аппаратуры пользователей [16]: большого числа гражданских и военных GPS - приемников, в которых полученный со спутников сигнал декодируется, из него выделяются кодовые последовательности, а также служебная информация. Полученный со спутников код сравнивается с внутренним кодом приемника, по этим данным определяется задержка прохождения радиосигнала и расстояния от спутников до приемника.
Рис. 4.19. Размещение станций контроля и управления системой NAVSTAR GPS: • — станции слежения; ■ — главные станции контроля; ▲ — наземные антенны
Координаты приёмника пользователя в системе определяются посредством их расчёта по псевдодальностям до спутника. Псевдодальности рассчитываются по временным задержкам Ti сигнала по трассе «i -ый спутник – приёмник» и известной скорости распространения радиоволн с без учёта поправки за расхождение часов спутника и приемника [17]:
Di = с Ti.
Рис. 4.20. Размещение станций контроля и управления системы ГЛОНАСС: ЦУС – центр управления системой ГЛОНАСС; ЦС – центральный синхронизатор; КС – контрольная станция; СКФ – система контроля фаз; КОС – квантово-оптическая станция; АКП – аппаратура контроля параметров; КСС – контрольная станция слежения
Ti измеряются в результате сопоставления принятых псевдослучайных кодов и генерируемых в приёмнике копий этих кодов с учётом априори известных моментов излучений сигналов спутника. При этом могут использоваться также соответствующие измерения разностей фаз несущих частот. Предварительно для определения координат проводится компенсация эффекта вращения Земли, тропосферных и ионосферных ошибок. Для решения задачи определения места и коррекции временной шкалы образуется система уравнений, неизвестными которой являются три координаты X, Y, Z и ошибка шкалы времени потребителя T’, проявляющаяся при априорном определении момента излучения сигнала навигационного космического аппарата [17]:
где X, Y, Z – прямоугольные координаты определяющегося объекта, на котором размещена навигационная аппаратура пользователя в геоцентрической системе координат; Xi, Yi, Zi – такие же координаты i-го навигационного космического аппарата; T’ – расхождение шкал времени навигационных космических аппаратов и приёмников пользователя; i=1,…, N – число навигационных космических аппаратов Учитывая, что неизвестных оказывается 4, поэтому для расчета четырехмерной координаты местоположения приемника (X, Y, Z, Time) требуется принять радиосигнал как минимум от четырех спутников. GPS-приемники используются для целей навигации, определения пространственных координат, определения точного времени и для других исследований. Обеспечение навигации в трехмерном пространстве является основной функцией GPS, для этой цели созданы приемники для самолетов, кораблей, автомобилей, индивидуальные ручные приемники. GPS сигналы используются также для определения точных координат (геодезические приемники), для астрономических наблюдений, для измерения параметров атмосферы и др. Каждый спутник и приемник имеет встроенные часы, которые точно синхронизированы с всемирным навигационным временем. Это позволяет и спутнику и приемнику в один и тот же момент времени генерировать одинаковый псевдослучайный код, как показано на рис. 4.21.

Рис. 4.21. Определение расстояния от GPS спутника до приемника
Когда приемник получает и расшифровывает код от спутника, он просматривает в обратном направлении свой собственный код и определяет промежуток времени, который прошел с того момента, когда приемник генерировал тот же код, который он принял от спутника. По известному времени прохождения радиосигнала от фазового центра передающей антенны спутника до фазового центра антенны приемника определяется расстояние между ними. Аналогичным образом измеряются расстояния и до других спутников, попадающих в поле зрения GPS приемника. В геодезических целях для обеспечения сантиметрового уровня точности измерений необходимо синхронизировать ход часов на спутнике и в приёмнике с ошибкой не более нескольких сотых долей наносекунды (1 нс = 1·10-9с), так как электромагнитное излучение проходит за одну наносекунду расстояние, равное 30 см [18]. Опорные генераторы являются основой устройств, с помощью которых отсчитывается время на спутнике и на земной станции. Несинхронность работы этих генераторов, следовательно, несинхронность хода часов на спутнике и на земной станции, приводит к существенному различию между истинным и измеренным значениями расстояния между спутником и точкой на Земле. Пространственные координаты фазового центра GPS приемника определяются пространственной линейной геодезической засечкой (методом пространственной трилатерации) от спутников с известными координатами, как показано на рис. 4.22. Для случая трехмерного пространства, измеренные расстояния до трех спутников дадут только две точки пересечения в пространстве, одна из которых может быть проигнорирована, так как она будет находиться далеко за пределами земного шара. Теоретически радиус-векторы, соответствующие измеренным расстояниям от спутников до приемника, отложенные от спутников с известными координатами, должны пересечься в одной точке, но на самом деле этого не происходит. Это вызвано тем, что кварцевые часы приемника имеют гораздо меньшую точность, чем высокоточные атомные часы спутников. Так, если в схему, показанную на рис. 4.20, ввести измерение дальности до четвертого спутника, то в результате в трехмерном пространстве вместо одной точки пересечения получатся четыре точки, удовлетворяющие условию пространственной геодезической засечки.

Рис. 4.22. Схема определения пространственных координат точки комплексом спутниковой геодезии
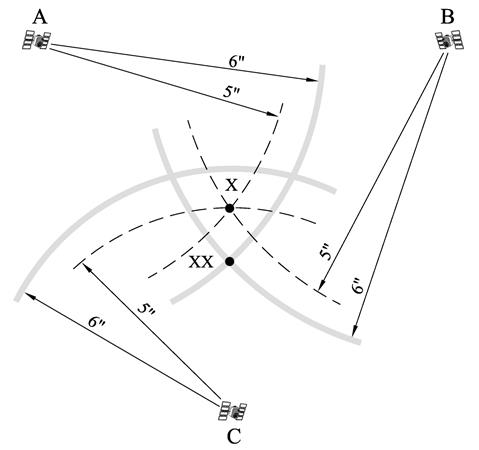
Возникающая неоднозначность в определении координаты искомой точки устраняется использованием алгоритма обработки псевдодальностей. Для упрощения этот алгоритм представлен на рис. 4.23 для случая плоской двухмерной засечки, в случае же реального трехмерного пространства добавится только одно измерение дальности до четвертого спутника. В данном случае приемник находится в точке Х, равноудаленной от спутников А, В и С на расстояние, эквивалентное 5-секундному времени прохождения радиосигнала. В случае абсолютно точного измерения расстояний, все три радиус-вектора должны пересечься в точке Х. На самом деле измеренное приемником расстояние до спутников эквивалентно 6-секундному интервалу времени прохождения радиосигнала. В этом случае пересечение радиус-векторов, отложенных от спутников А и В даст точку пересечения ХХ, а введение в схему третьего измерения до спутника С даст дополнительно еще две точки пересечения.
Рис. 4.23. Схема алгоритма обработки псевдодальностей
Зная причину этого явления – неверный ход внутренних часов GPS приемника – легко найти точку истинного местоположения фазового центра приемника. В данном случае встроенный микрокомпьютер приемника начинает прибавлять и вычитать одно и то же время от произведенных измерений дальностей до спутников. Так, в вышеописанном случае, компьютер определит, что вычитание одной секунды из всех трех измерений дальностей даст пересечение радиус-векторов в одной точке Х, это также позволит сделать вывод, что внутренние часы приемника спешат на одну секунду. В случае двухмерного пространства – плоской задачи необходимо произвести минимум три измерения дальности до спутников, в случае же реального трехмерного пространства необходимо произвести четыре измерения расстояний до четырех спутников. Этим объясняется одно из основных требований определения координат комплексами спутниковой геодезии – необходимость производить измерение расстояний как минимум до четырех спутников с известными пространственными координатами. Точность вышеописанного способа определения координат одиночным приемником, использующего только гражданский Р – код будет составлять около 5 – 10 метров, что является неприемлемым для применения таких измерений в геодезической и маркшейдерской практике. Причина такой низкой точности определения координат обусловлена тем, что при прохождении через атмосферу Земли спутниковый радиосигнал претерпевает искажения, основное из которых – ионосферная задержка радиосигнала. Исключить влияние ионосферных задержек радиосигнала и других неблагоприятных факторов можно применением технологии «дифференциальной GPS» (рис. 4.24), которая позволяет получать координаты определяемой точки с миллиметровой точностью.
 Рис. 4.24. Применение технологии дифференциальной GPS Рис. 4.24. Применение технологии дифференциальной GPS
для определения точных координат точки Основная идея этой технологии состоит в том, что один из приемников (базовый приемник) помещается на точку с заранее известными координатами, так называемую базовую станцию, и ведет непрерывные спутниковые наблюдения весь сеанс GPS съемки. В результате такого наблюдения определяется величина ионосферной поправки, равная разнице заранее известных координат точки и ее координат, полученных в результате сеанса спутниковых наблюдений. Полученная величина ионосферной поправки вводится в результаты спутниковых наблюдений на определяемых точках. При этом главным условием работы в режиме дифференциальной GPS является обеспечение одновременного приема сигнала от общих спутников базовым и полевым приемниками. Так как величина ионосферной поправки является постоянной на довольно обширных территориях, то технологию дифференциальной GPS возможно использовать без снижения точности определения координат для наблюдения базовых линий длиной от 1 метра до 1000 км. Ионосферная поправка может вноситься в результаты измерений двумя способами. В первом случае величина поправки передается на приемник, определяющий координаты точки либо по радиомодему с использованием выделенного радиоканала, либо через систему специальных радиомаяков в режиме реального времени. Во втором случае ионосферная поправка учитывается во время обработки результатов измерений в камеральных условиях. Выбор способа передачи величины ионосферной поправки целиком зависит от задач съемки. В случае необходимости получения определяемых координат с точностью 3-5 см прямо в поле, целесообразно получение ионосферных поправок по радиоканалу. В случае, когда существует необходимость в выполнении высокоточных геодезических работ, ионосферная поправка будет учитываться при камеральной обработке данных полевых измерений. Основным режимом сбора данных для всех дифференциальных GPS съемок является наблюдение базовых линий (векторов). В простейшем случае один из приемников помещается на точку с известными координатами, а другой помещается на точку, пространственное положение которой необходимо определить. В течение определенного периода времени, зависящего от конкретного вида съемки и количества спутников, от которых идет прием радиосигнала, производится наблюдение базовой линии, после чего приемник перемещается на следующую точку. Одно из наибольших отличий GPS съемок по сравнению с традиционными видами геодезических съемок заключается в том, что приращения координат между станциями вычисляются на математическом эллипсоиде WGS-84 (World Geodetic System) в геоцентрической системе координат, а не в принятой плановой системе координат. При этом вычисляется положение определяемых станций относительно базовых, которые затем трансформируются на используемую модель эллипсоида в принятой картографической проекции, например на эллипсоид Красовского в прямоугольной проекции Гаусса. Существует несколько способов трансформации координат с эллипсоида WGS-84 в пользовательские системы координат. Среди них наиболее распространенными являются способы «3 параметра» (Молоденского), способ «7 параметров», способ пространственного вращения сети и полиномиальная регрессия. Все вычисления в GPS производятся в геоцентрической системе координат с использованием параметров математического эллипсоида WGS - 84, центр которого совпадает с центром тяжести Земли. В отличие от применяемых в традиционной геодезии линий по земной поверхности (задачи землеустройства) и проекции линии на поверхность эллипсоида (геодезическая линия), вектор, также называемый базовой линией (BaseLine), есть результат обработки GPS данных, представляющий собой линию между базовой и определяемой станциями относительно центра Земли в математическом эллипсоиде WGS - 84, как это показано на рис. 4.25. Несколько векторов в совокупности представляют собой геодезическую GPS сеть, натянутую на поверхность математического эллипсоида. При помощи соответствующих программ обработки данных сеть строго уравнивается, причем в некоторых программах обработки предусмотрена возможность совместного уравнивания GPS измерений и геодезических измерений, выполненных с использованием традиционных технологий, координаты определяемых пунктов трансформируются на эллипсоид Красовского в принятой картографической проекции.
Рис. 4.25. Вектор и геодезическая линия на эллипсоиде WGS-84
Несколько более сложно при спутниковых геодезических измерениях определить нормальную высоту точки наблюдений – «отметку в Балтийской системе высот». Дело в том, что при трансформации координат из геоцентрической системы вычисляется эллиптическая высота точки наблюдения h, отсчитываемая от поверхности принятого эллипсоида, как показано на рис. 4.26.
Рис. 4.26. Системы высот, применяемые в геодезии
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2017-01-26; просмотров: 211; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.217.220.114 (0.123 с.) |
 , мм или
, мм или  , мм при числе станций более 25 на 1 км хода, где L – длина хода в км, n – число станций в ходе [3].
, мм при числе станций более 25 на 1 км хода, где L – длина хода в км, n – число станций в ходе [3]. , высоты сигнала
, высоты сигнала  (рис. 4.12).
(рис. 4.12). ,
, ,
, – поправка за кривизну Земли;
– поправка за кривизну Земли;  – поправка за рефракцию; R = 6370 км - средний радиус Земли;
– поправка за рефракцию; R = 6370 км - средний радиус Земли;  – коэффициент вертикальной рефракции.
– коэффициент вертикальной рефракции. .
.
 , где l – наклонная длина стороны, м; L – длина хода, м; n – число сторон.
, где l – наклонная длина стороны, м; L – длина хода, м; n – число сторон. ,
, – относительная скорость перемещения;
– относительная скорость перемещения;  – средняя скорость электромагнитных волн.
– средняя скорость электромагнитных волн. , которая интегрируется по времени, в результате находят пройденный путь.
, которая интегрируется по времени, в результате находят пройденный путь.






 ,
,