
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
К лабораторным работам по курсуСтр 1 из 10Следующая ⇒
Машины постоянного тока Методические указания К лабораторным работам по курсу «Электромеханика» для студентов Специальности 10.04
Барнаул 2009 УДК 621.313.3(075.б) Капустин В.М., Гесенко Н.М. Машины постоянного тока. Методические указания к лабораторным работам по курсу «Электромеханика» для студентов специальности 10.04/Алт.ГТУ им. И.И. Ползунова.-Барнаул: Изд-во АлтГТУ, 2009.-61с. Даны описания лабораторных установок, методика проведения опытов и обработки результатов по машинам постоянного тока. Рассмотрены и одобрены на заседании кафедры «Электрификация производства и быта» Рецензент: Калинин Ц.И. Машины постоянного тока Методические указания к лабораторным работам по курсу «Электромеханика» для студентов специальности 10.04 Редактор: Сумцов Б.Н. Подписано в печать Формат 60x84 I/IS. Офсетная печать. Усл.п.л. 1,63.Уч.-над.л. 1,60. Тираж экз. Алт.ГТУ им. И.И. Ползунова. 656099, г. Барнаул, пр. Ленина,46
Отпечатано на ротапринте Алт.ГТУ им. И.И. Ползунова, г. Барнаул, пр. Ленина, 46 Министерство образования и науки Российской Федерации Алтайский государственный технический университет им. И.И. Ползунова В.М. Капустин, Н.М. Гесенко Машины постоянного тока. Методические указания к лабораторным работам по курсу «Электромеханика» для студентов специальности 10.04 Барнаул 2010 Машины постоянного тока (краткие теоретические сведения) Электрические машины по роду питания делятся на машины переменного и постоянного тока. Машины постоянного тока подключаются к сети постоянного тока. В автономных системах машина постоянного тока является источником постоянного тока в генераторном режиме, а в режиме двигателя потребляет энергию от источника постоянного тока. Машины постоянного тика – генераторы и двигатели находят широкое применение во всех отраслях народного хозяйства, в том числе и в сельском хозяйстве, так как обладают рядом ценных свойств. В настоящее время генераторы постоянного тока заменяются простыми и дешёвыми статическими полупроводниковыми преобразователями, но генераторы постоянного тока в большей степени удовлетворяют требованиям производства. Сохраняется большая область производств, где генераторы постоянного тока пока незаменимы.
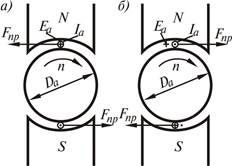
Автоматизированный электропривод на базе двигателей постоянного тока представляет серьёзную конкуренцию автоматизированному электроприводу переменного тока, а в некоторых случаях по технико-экономическим показателям превосходит последний. Классический тип машины постоянного тока – коллекторная машина, в принципе это машина переменного тока с коллектором. Коллектор и щеточный аппарат представляют собой механический выпрямитель в генераторах постоянного тока и механический инвертор (преобразователь постоянного тока в переменный) в двигателях постоянного тока. Классификация обмоток якорей машин постоянного тока Независимо от типа якоря (кольцевой или барабанный) мы имеем следующие типы обмоток якоря машин постоянного тока: Простые обмотки образуют всегда только одну замкнутую на себя систему проводников, тогда как сложные обмотки могут образовать и одну и несколько таких систем. В первом случае будем называть сложную обмотку однократнозамкнутой, во втором – многократнозамкнутой. Режим генератора. Предположим, что якорь машины (рисунок 3, а) приводится во вращение по часовой стрелке. Тогда в проводниках обмотки якоря индуктируется ЭДС, направление которой может быть определено по правилу правой руки и показано на рисунке 3, а. Поскольку поток полюсов предполагается неизменным, то эта ЭДС индуктируется только вследствие вращения якоря и называется ЭДС вращения. Величина индуктируемой в проводнике обмотки якоря ЭДС.
Рисунок 3 – Работа простейшей машины постоянного тока в режиме генератора (а) и двигателя (б) где В обоих проводниках вследствие симметрии индуктируются одинаковые ЭДС, которые по контуру витка складываются, и поэтому полная ЭДС якоря рассматриваемой машины
ЭДС Частота ЭДС
а в общем случае, когда машина имеет
В генераторе коллектор является механическим выпрямителем, который преобразовывает переменный ток обмотки якоря в постоянный ток во внешней цепи. Напряжение постоянного тока на зажимах якоря генератора будет меньше
Проводники обмотки якоря с током
направление которых определяется по правилу левой руки. Эти силы создают механический вращающий момент
где Режим двигателя. Рассматриваемая простейшая машина может работать также двигателем, если к обмотке ее якоря подвести постоянный ток от внешнего источника. При этом на проводники обмотки якоря будут действовать электромагнитные силы Если мы желаем, чтобы при той же полярности полюсов направления вращения генератора (рисунок 3, а) и двигателя (рисунок 3, б) были одинаковы, то направление действия В режиме двигателя коллектор превращает потребляемый из внешней цепи постоянный ток в переменный ток в обмотке якоря и работает, таким образом, в качестве механического инвертора тока. Проводники обмотки якоря двигателя также вращаются в магнитном поле, и поэтому в обмотке якоря двигателя тоже индуктируется ЭДС Приложенное к якорю двигателя напряжение уравновешивается ЭДС
Принцип обратимости: Из изложенного выше следует, что каждая машина постоянного тока может работать как в режиме генератора, так и в режиме двигателя. Такое свойство присуще всем типам вращающихся электрических машин и называется обратимостью. Для перехода машины постоянного тока из режима генератора в режим двигателя и обратно при неизменной полярности полюсов и щеток и при неизменном направлении вращения требуется только изменение направления тока в обмотке якоря.
Поэтому такой переход может осуществляться весьма просто и в определенных условиях даже автоматически. Преобразование энергии. На рис.4 показаны направления действия механических и электрических величин в якоре генератора и двигателя постоянного тока.
Рисунок 4 – Направления ЭДС тока и моментов в генераторе (а) и двигателе (б) постоянного тока. Согласно первому закону Ньютона в применении к вращающемуся телу, действующие на это тело движущие и тормозящие вращающие моменты уравновешивают друг друга. Поэтому в генераторе при установившемся режиме работы электромагнитный момент
где Эти потери мощности появляются в результате вращения сердечника якоря в неподвижном магнитном поле полюсов. Возникающие при этом электромагнитные силы оказывают на якорь тормозящее действие и в этом отношении проявляют себя подобно силам трения. В двигателе при установившемся режиме работы
где В генераторе Развиваемая электромагнитным моментом
где
представляет собой угловую скорость вращения.
В обмотке якоря под действием ЭДС
Согласно равенствам (4.5) и (4.6), Для генератора
и для двигателя
Левые части этих выражений представляют собой электрические мощности на зажимах якоря, первые члены правых частей – электромагнитную мощность якоря и последние члены – электрические потери мощности в якоре. Согласно этим выражениям, механическая мощность, развиваемая на валу генератора первичным двигателем, за вычетом механических и магнитных потерь превращается в электрическую мощность в обмотке якоря, а электрическая мощность за вычетом потерь в этой обмотке выдается во внешнюю цепь. В двигателе электрическая мощность, подводимая к якорю из внешней цепи, частично расходуется на потери в обмотке якоря, а остальная часть превращается в мощность электромагнитного поля и последняя – в механическую мощность, которая за вычетом потерь на трение и потерь в стали якоря передается рабочей машине.
Потери. Общие положения. При работе электрической машины часть потребляемой ею энергии теряется бесполезно и рассеивается в виде тепла. Мощность потерянной энергии называют потерями мощности или просто потерями. Потери в электрических машинах подразделяются на основные и добавочные. Основные потери возникают в результате происходящих в машине основных электромагнитных и механических процессов, а добавочные потери обусловлены различными вторичными явлениями. Во вращающихся электрических машинах основные потери подразделяются на 1) механические потери, 2) магнитные потери (потери в стали) и 3) электрические потери. К электрическим потерям относятся потери в обмотках, которые называются также потерями в меди, хотя обмотки и не всегда изготовляются из меди, потери в регулировочных реостатах и потери в переходном сопротивлении щеточных контактов. Механические потери Потери в подшипниках Потери на трение щеток могут быть вычислены по формуле
где Потери на вентиляцию
где Общие механические потери
Как следует из изложенного, в каждой данной машине потери Магнитные потери К магнитным потерям относят также такие добавочные потери, которые зависят от величины основного потока машины (потока полюсов) и вызваны зубчатым строением сердечников. Эти потери называют также добавочными потерями холостого хода, так как они существуют в возбужденной машине уже при холостом ходе. К указанным потерям в машинах постоянного тока относятся, прежде всего поверхностные потери
Если пазы имеются также в полюсных наконечниках машины постоянного тока (при наличии компенсационной обмотки), то в зубцах якоря и полюсах в результате их взаимного перемещения возникают пульсации магнитного потока. Потоки в зубцах максимальны, когда зубец якоря расположен против зубца полюса, и минимальны, когда против зубца расположен паз. Частота этих пульсаций также велика. При этом возникают пульсационные потери К добавочным потерям холостого хода откосятся также потери, которые возникают в проволочных бандажах, обмоткодержателях и в других деталях при их вращении в магнитном поле полюсов. Общие магнитные потери
Электрические потери Потери в обмотках можно выразить также через плотность тока в обмотке
К электрическим потерям относят также потери в регулировочных реостатах и потери в переходных сопротивлениях щеточных контактов. Величина потерь в переходных сопротивлениях щеточных контактов для щеток одной полярности вычисляется по формуле
где Добавочные потери В машинах постоянного тока одна часть рассматриваемых потерь возникает вследствие искажения кривой магнитного поля в воздушном зазоре при нагрузке под влиянием поперечной реакции якоря. В результате этого магнитный поток распределяется по зубцам и сечению спинки якоря неравномерно: с одного края полюсного наконечника индукция в зубцах и спинке якоря уменьшается, а с другого края увеличивается. Такое неравномерное распределение потока вызывает увеличение магнитных потерь, подобно тому, как неравномерное распределение тока в проводнике вызывает увеличение электрических потерь. Вследствие такого неравномерного распределения потока увеличиваются также поверхностные потери в полюсных наконечниках. При наличии компенсационной обмотки рассмотренная часть добавочных потерь практически отсутствует. Другая часть добавочных потерь в машинах постоянного тока связана с коммутацией. При изменении во времени потоков рассеяния коммутируемых секций в проводниках обмотки индуктируются вихревые токи. Добавочный ток коммутации также вызывает дополнительные потери. На практике добавочные потери оценивают на основе опытных данных в виде определенного процента от номинальной мощности. Согласно ГОСТ 11828 – 66, эти потери для машин постоянного тока при номинальной нагрузке принимаются: при отсутствии компенсационной обмотки равными 1,0% и при наличии компенсационной обмотки равными 0,5% от отдаваемой мощности для генератора и проводимой мощности для двигателя. Для других нагрузок эти потери пересчитываются пропорционально квадрату тока нагрузки. Все виды добавочных потерь, не связанные непосредственно с электрическими процессами в цепях обмоток машины, покрываются за счет механической мощности на валу машины. Суммарные, или полные, потери
Двигатели постоянного тока. Двигатели постоянного тока преобразуют электрическую энергию постоянного тока в механическую. Несмотря на успехи в создании статических полупроводниковых преобразователей и внедрение регулируемых электроприводов переменного тока, производство двигателей постоянного тока увеличивается, и они находят новые области приме нения. Двигатели постоянного тока благодаря наличию механического преобразователя частоты – коллектора допускают плавное и экономичное регулирование частоты вращения. Это преимущество перед двигателями переменного тока обеспечивает применение двигателей постоянного тока в электроприводах с широким диапазоном изменения частоты вращения. Двигатели постоянного тока находят применение в приводах прокатных станов, станков, на транспорте и в других системах автоматического управления. По способу возбуждения двигатели постоянного тока, так же как и генераторы, делятся на двигатели независимого, параллельного, последовательного и смешанного возбуждения (см. рисунок 6). Двигатели независимого возбуждения могут быть разделены на двигатели с электромагнитным возбуждением, когда обмотка возбуждения подключена к постороннему источнику постоянного тока, и на двигатели с магнитоэлектрическим возбуждением, когда вместо обмотки возбуждения используются постоянные магниты. Основными характеристиками двигателей постоянного тока являются рабочие и механические характеристики. Характеристики холостого хода и короткого замыкания снимаются так же, как и в генераторном режиме. Рабочие характеристики двигателя параллельного возбуждения представлены на рисунке 12 а. Это – зависимости С увеличением нагрузки на валу двигателя
Рисунок 12 Рабочие характеристики двигателя параллельного возбуждения а и механические характеристики двигателей при различных схемах возбуждения б (1 – параллельное; 2 – последовательное; 3 – смешанное при согласном включении обмоток). Зависимости
На рисунке 12 б представлены механические характеристики двигателей постоянного тока при различных схемах возбуждения. Механическая характеристика двигателя параллельного возбуждения – жесткая. Двигатель последовательного возбуждения имеет удобную для транспортных установок механическую характеристику, когда с уменьшением частоты вращения растет момент. Механическая характеристика двигателя смешанного возбуждения – промежуточная между механическими характеристиками двигателя параллельного и последовательного возбуждения. В двигателях последовательного возбуждения ток возбуждения равен току якоря. В двигателях параллельного возбуждения момент пропорционален потоку, а в двигателях последовательного возбуждения – квадрату тока, поэтому двигатели последовательного возбуждения имеют большой пусковой момент и большую перегрузочную способность. Двигатели последовательного возбуждения из-за особенностей своей механической характеристики не могут применяться в электроприводах, в которых возможно уменьшение момента сопротивления до нуля, что приведет к уменьшению тока в якоре и снижению потока, и двигатель пойдет в разнос. При этом увеличится частота вращения, и машина может выйти из строя. Частоту вращения двигателей постоянного тока можно регулировать путем изменения напряжения, введения сопротивления в цепь ротора и изменения потока. Наиболее распространенный способ регулирования частоты вращения – изменение потока возбуждения путем регулирования тока в обмотке возбуждения. Наиболее простой способ регулирования тока возбуждения – варьирование сопротивления регулировочного резистора в контуре возбуждения (см. рисунок 6, а, б). При изменении тока возбуждения имеют место механические характеристики такие, как это показано на рисунке 13 а. Таким способом можно регулировать частоту вращения в пределах 1:1,5 и 1:2. Глубокое уменьшение потока недопустимо, так как при нагрузке реакция якоря будет «опрокидывать» поле возбуждения, что приведет к неустойчивой работе двигателя. Увеличение потока в обычных двигателях параллельного возбуждения нецелесообразно, так как магнитная система двигателей насыщена. При увеличении массы двигателя и принятии специальных мер можно увеличить пределы регулирования частоты вращения в ненасыщенных двигателях до 1:5, 1:8. Хотя этот способ обеспечивает сравнительно небольшие пределы регулирования частоты вращения, он является экономичным и находит широкое применение, когда пределы изменения частоты вращения небольшие.
Рисунок 13 Регулирование частоты вращения путем изменения потока возбуждения а и сопротивления в цепи якоря б. Регулирование частоты вращения путем введения Механические характеристики при этом способе регулирования показаны на рисунке 13 б. Механические характеристики при различных Регулирование частоты вращения путем введения сопротивления в цепь якоря применяется в двигателях последовательного и смешанного возбуждения. В двигателях последовательного возбуждения для регулирования частоты вращения применяется также шунтирование обмотки возбуждения активным сопротивлением. При тех же пределах регулирования частоты вращения последовательное включение Лучшие механические характеристики и меньшие потери в двигателе постоянного тока достигаются при регулировании частоты вращения за счет подводимого к двигателю напряжения. Но, как и в машинах переменного тока, при этом способе регулирования частоты вращения необходимо иметь громоздкое устройство, обеспечивающее регулирование напряжения. Цель работы По данным эксперимента построить основные характеристики генератора и сделать анализ взаимосвязей параметров режима работы генератора при различных способах возбуждения. Лабораторная установка Лабораторная установка представляет собой агрегат из исследуемого генератора и асинхронного двигателя, валы которых соединены жестко с помощью муфты. Аппараты управления асинхронным двигателем, измерительные приборы, вторичный прибор тахогенератора, нагрузочные сопротивления, автоматические выключатели смонтированы на стенде. На панели размещено коммутационное поле, позволяющее собрать соответствующую заданию схему. Правильность соединений перед пуском установки проверяется преподавателем, который дает разрешение на включение. Программа работы Произвести опыт и определить характеристики А. Генератор независимого возбуждения: 1. Построить характеристику холостого хода 2. Нагрузочную характеристику 3. Внешнюю характеристику 4. Регулировочную характеристику 5. Характеристику короткого замыкания Б. Генераторы параллельного возбуждения: 1. Нагрузочную характеристику 2. Внешнюю характеристику 3. Регулировочную характеристику В. Генератор смешанного возбуждения (согласное включение обмоток): 1. Нагрузочную характеристику 2. Внешнюю характеристику 3. Регулировочную характеристику Рассчитать и построить 1. По характеристике холостого хода: а) коэффициент насыщения магнитной цепи при б) остаточный магнитный поток в процентах от полного потока при в) характеристику холостого хода и нагрузочную характеристику построить на одном графике и определить продольную результирующую намагничивающей силы реакции якоря. 2. Внешние характеристики генераторов независимого, параллельного и смешанного возбуждения построить на одном графике и определить процентное изменение напряжения генераторов. 3. Регулировочные характеристики генераторов всех видов возбуждения построить на одном графике и по ним определить намагничивающую силу последовательной обмотки в процентах от намагничивающей силы машины при Методические указания. Рисунок 5 В качестве источника питания лучше всего использовать батарею аккумуляторов. Сопротивление параллельной (шунтовой) обмотки возбуждения составляет десятки и сотни Ом и может быть использован омметр, мост постоянного тока и метод вольтметра-амперметра. Установка щеток на нейтрале Проверка установки щеток на нейтрале наиболее просто и точно осуществляется индуктивным методом. При неподвижном якоре на обмотку возбуждения (параллельную) подается напряжение. К щеткам подключается вольтметр со шкалой, пределы которой составляют от 3 до 5% номинального напряжения. Если щетки установлены точно на геометрической нейтрала, то при замыкании цепи тока обмотки возбуждения стрелка вольтметра не отклоняется. Нагрузочная характеристика Нагрузочные характеристики При нагрузке магнитный поток машины обусловлен совместным действием обмоток возбуждения и якорной обмотки. Для снятия нагрузочных характеристик генератор возбуждается, устанавливается номинальное напряжение Поддерживая постоянным ток
Данные опыта заносятся в таблицу 2. Таблица 2
При
|
|||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-12-30; просмотров: 422; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.218.168.16 (0.157 с.) |

 , (1)
, (1) – величина магнитной индукции в воздушном зазоре между полюсом и якорем в месте расположения проводника;
– величина магнитной индукции в воздушном зазоре между полюсом и якорем в месте расположения проводника;  – активная длина проводника между полюсом и якорем в месте расположения проводника, т.е. та длина, на протяжениикоторой он расположен в магнитном поле;
– активная длина проводника между полюсом и якорем в месте расположения проводника, т.е. та длина, на протяжениикоторой он расположен в магнитном поле;  – линейная скорость движения проводника.
– линейная скорость движения проводника. . (2)
. (2) является переменной, так как проводники обмотки якоря проходят попеременно под северным и южным полюсами, в результате чего направление ЭДС в проводниках меняется.
является переменной, так как проводники обмотки якоря проходят попеременно под северным и южным полюсами, в результате чего направление ЭДС в проводниках меняется. в двухполюсной машине равна скорости вращения якоря
в двухполюсной машине равна скорости вращения якоря  , выраженной в оборотах в секунду:
, выраженной в оборотах в секунду: , (3)
, (3) пар полюсов с чередующейся полярностью,
пар полюсов с чередующейся полярностью, . (4)
. (4) :
: . (5)
. (5) находятся в магнитном поле, и поэтому на них будут действовать электромагнитные силы:
находятся в магнитном поле, и поэтому на них будут действовать электромагнитные силы: , (6)
, (6) , который называется электромагнитным моментом и на рисунке 3 а, равен
, который называется электромагнитным моментом и на рисунке 3 а, равен , (7)
, (7) – диаметр якоря. Как видно из рисунка 3 а, в режиме генератора этот момент действует против направления вращения якоря и является тормозящим.
– диаметр якоря. Как видно из рисунка 3 а, в режиме генератора этот момент действует против направления вращения якоря и является тормозящим. и возникнет электромагнитный момент
и возникнет электромагнитный момент  у двигателя должны быть обратными по сравнению с генератором (рисунок 3, б).
у двигателя должны быть обратными по сравнению с генератором (рисунок 3, б). . Поэтому ЭДС якоря двигателя называется также противоэлектродвижущей силой.
. Поэтому ЭДС якоря двигателя называется также противоэлектродвижущей силой. . (8)
. (8)
 , (9)
, (9) – момент на валу генератора, развиваемый первичным двигателем,
– момент на валу генератора, развиваемый первичным двигателем,  – момент сил трения в подшипниках, о воздух и на коллекторе машины,
– момент сил трения в подшипниках, о воздух и на коллекторе машины,  – тормозящий момент, вызываемый потерями на гистерезис и вихревые токи в сердечнике якоря.
– тормозящий момент, вызываемый потерями на гистерезис и вихревые токи в сердечнике якоря. , (10)
, (10) называется электромагнитной мощностью и равна
называется электромагнитной мощностью и равна , (11)
, (11) (12)
(12) (13)
(13) . (14)
. (14) , т.е. внутренняя электрическая мощность якоря равна электромагнитной мощности, развиваемой электромагнитным моментом, что отражает процесс преобразования механической энергии в электрическую в генераторе и обратный процесс в двигателе.
, т.е. внутренняя электрическая мощность якоря равна электромагнитной мощности, развиваемой электромагнитным моментом, что отражает процесс преобразования механической энергии в электрическую в генераторе и обратный процесс в двигателе. (15)
(15) . (16)
. (16) состоят из 1) потерь в подшипниках, 2) потерь на трение щеток о коллектор или контактные кольца и 3) вентиляционных потерь, которые включают в себя потери на трение частей машины о воздух и другие потери, связанные с вентиляцией машины.
состоят из 1) потерь в подшипниках, 2) потерь на трение щеток о коллектор или контактные кольца и 3) вентиляционных потерь, которые включают в себя потери на трение частей машины о воздух и другие потери, связанные с вентиляцией машины. зависят от типа подшипников (качения или скольжения), от состояния трущихся поверхностей, вида смазки и т. д.
зависят от типа подшипников (качения или скольжения), от состояния трущихся поверхностей, вида смазки и т. д. , (17)
, (17) – коэффициент трения щеток о коллектор или контактные кольца (
– коэффициент трения щеток о коллектор или контактные кольца ( );
);  – удельное (на единицу площади) давление на щетку;
– удельное (на единицу площади) давление на щетку;  – контактная поверхность всех щеток;
– контактная поверхность всех щеток;  – окружная скорость коллектора или контактных колец.
– окружная скорость коллектора или контактных колец. зависят от конструкции машины и рода вентиляции. В самовентилируемых машинах со встроенным центробежным вентилятором потери на вентиляцию вычисляются приближенно по формуле:
зависят от конструкции машины и рода вентиляции. В самовентилируемых машинах со встроенным центробежным вентилятором потери на вентиляцию вычисляются приближенно по формуле: , Вт (18)
, Вт (18) – количество воздуха, прогоняемого через машину,
– количество воздуха, прогоняемого через машину,  ;
; .
. . (19)
. (19) включают в себя потери на гистерезис и вихревые токи, вызванные перемагничиванием сердечников активной стали. Для вычисления этих потерь сердечник подразделяется на части, в каждой из которых магнитная индукция постоянна. Например, в машинах постоянного тока вычисляются отдельно потери в сердечнике якоря
включают в себя потери на гистерезис и вихревые токи, вызванные перемагничиванием сердечников активной стали. Для вычисления этих потерь сердечник подразделяется на части, в каждой из которых магнитная индукция постоянна. Например, в машинах постоянного тока вычисляются отдельно потери в сердечнике якоря  и в зубцах якоря
и в зубцах якоря  .
. в полюсных наконечниках, обусловленные зубчатостью якоря.
в полюсных наконечниках, обусловленные зубчатостью якоря. в зубцах и поверхностные потери также на внешней поверхности якоря.
в зубцах и поверхностные потери также на внешней поверхности якоря. . (20)
. (20) в каждой обмотке вычисляют по формуле
в каждой обмотке вычисляют по формуле  . Сопротивление обмотки зависит от ее температуры. В нормальных машинах постоянного тока имеются две электрические цепи: цепь якоря и цепь возбуждения. Поэтому обычно рассчитывают потери в цепи якоря
. Сопротивление обмотки зависит от ее температуры. В нормальных машинах постоянного тока имеются две электрические цепи: цепь якоря и цепь возбуждения. Поэтому обычно рассчитывают потери в цепи якоря  и в цепи возбуждения
и в цепи возбуждения  .
. и вес обмотки (без изоляции)
и вес обмотки (без изоляции) 
 . (21)
. (21) , (22)
, (22) – падение напряжения на один щеточный контакт.
– падение напряжения на один щеточный контакт. . К этой группе относят потери, вызванные различными вторичными явлениями при нагрузке машины.
. К этой группе относят потери, вызванные различными вторичными явлениями при нагрузке машины. представляют собой сумму всех потерь:
представляют собой сумму всех потерь: . (23)
. (23) ,
,  ,
,  ,
,  и
и  при постоянном напряжении сети
при постоянном напряжении сети  и неизменном положении реостата в цепи обмотки возбуждения.
и неизменном положении реостата в цепи обмотки возбуждения. растет момент на валу двигателя
растет момент на валу двигателя 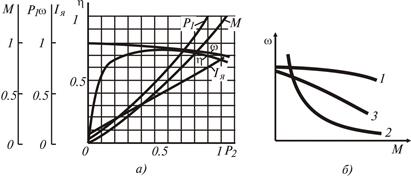
 . Характеристика
. Характеристика  при постоянном напряжении сети и неизменных сопротивлениях регулировочных реостатов называется механической характеристикой двигателя и описывается равнением:
при постоянном напряжении сети и неизменных сопротивлениях регулировочных реостатов называется механической характеристикой двигателя и описывается равнением: . (30)
. (30)
 позволяет изменять частоту вращения в широких пределах, но этот способ неэкономичен, так как регулировочный резистор включается в силовую цепь и на нем выделяется тепло, пропорциональное квадрату тока нагрузки.
позволяет изменять частоту вращения в широких пределах, но этот способ неэкономичен, так как регулировочный резистор включается в силовую цепь и на нем выделяется тепло, пропорциональное квадрату тока нагрузки. )
)  , где
, где  – установившейся ток короткого замыкания. Ток короткого замыкания определяется внутренним сопротивлением двигателя и напряжением, которое равно напряжению сети.
– установившейся ток короткого замыкания. Ток короткого замыкания определяется внутренним сопротивлением двигателя и напряжением, которое равно напряжению сети. при
при  и
и 
 при
при  ,
, 
 при
при  ,
, 
 при
при  ,
,  при
при  ,
,  ,
, 

 ;
; снимаются по схеме рис. 6, но при замкнутом выключателе
снимаются по схеме рис. 6, но при замкнутом выключателе  .
. и нагрузка
и нагрузка  .
. реостатом в цепи возбуждения.
реостатом в цепи возбуждения.




