Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Подбор вагонов под погрузку.Содержание книги Поиск на нашем сайте
Задача обеспечивает выдачу на вновь сформированный состав выписки из книги формы ВУ-14 о годности вагонов под погрузку. Входной информацией для решения данных задач являются следующие информационные сообщения: − 0031 «Дефектная ведомость на поезд»; − 0032 «Состав бригад»; − 0036 «Список отремонтированных вагонов». А также сообщения передаваемых из комплекса задач АСУ СС: − 0002 «Натурный лист поезда»; − 0008 «Выставка поезда»; − 0009 «Корректировка натурного листа поезда»; − 118 «О наличии в поезде вагонов, требующих планового ремонта по календарному сроку или по пробегу»; − 200 «Об отправлении поезда»; − 201 «О прибытии поезда»; − 203 «О роспуске состава» и другие обеспечивающие ведение в АСУ ПТО полной модели сортировочной станции. − 215 «О проведении поезду полного технического обслуживания в начале гарантийного участка». Решение комплекса перечисленных задач АСУ ПТО позволяет повысить качество технического обслуживания вагонов, ответственность осмотрщиков вагонов парка прибытия, способствует сокращению простоя состава под технической обработкой на станции, позволяет более рационально организовать работу ремонтных бригад в парке отправления, улучшает условия труда оператора ПТО парка прибытия, обеспечивает руководителей ПТО своевременной и достоверной информацией для проведения анализа и контроля за работой ПТО, принятия управляющих решений.
Рис.1- Схема информационных потоков АСУ ПТО
Преимущества АСУ ТП: · Повышение качества и количества выпускаемой продукции. · Безошибочное выполнение сложных задач без использования человеческого фактора. · Минимизация рабочих мест (до операторов, сервисного и обслуживающего персонала). · Возможность обработки огромного количества данных. · Оптимальное использование ресурсов на производстве. · Комплексное взаимодействие между объектами производства. · Надежность в реагировании на нестандартные ситуации (авария).
Этапы АСУ ТП: · Обследование объектов. · Разработка проектной документации. · Поставка и сборка оборудования на собственном производстве. · Программирование приборов. · Создание систем диспетчеризации. · Монтажные работы на объекте. · Пусконаладочные работы на объекте.
Внедрение АСУ ТП получает широкое распространение в различных секторах отечественной экономики, таких как нефтяная и газовая промышленность, химия и нефтехимия, металлургия, энергетика. В последнее время АСУ ТП начинают проникать в такие сферы, как управление дорожным движением, медицина, машиностроение, ЖКХ. Отдельное направление их применения составляет военная и космическая техника, где системы автоматизации используются в качестве встроенных средств контроля и управления.
Список использованных источников: 1.http://www.asu-tp.org/index.php 2.file:///C:/Documents 3.http://akkon.ru/index.php
ЛАБОРАТОРНАЯ РАБОТА № 3 Комплекс для контроля подвижного состава на «ходу»
Цель работы: ознакомиться с принципом работы комплекса для контроля подвижного состава на ходу КТСМ-02. Назначение КТСМ-02 Основное назначение КТСМ-02 заключается в контроле дислокации ПС на участке контроля с целью привязки сигналов к конкретным осям, подвижным единицам и контролируемым поездам, а также координации работы подключенных к нему подсистем и обеспечении информационно взаимодействия через систему централизации с системами контроля и управления верхнего уровня (АСК ПС, ДНЦ, ДГП).[1] В состав комплекса КТСМ-02БТ входят: Комплекс КТСМ-02 является микропроцессорной многофункциональной системой автоматического контроля технического состояния железнодорожного подвижного состава. Комплекс КТСМ-02 состоит из перегонного (постового и напольного оборудования) концентратора информации КИ-6М и автоматизированного рабочего места оператора (АРМ ЛПК), размещённых на станции. На рисунке 1 показано размещение двух напольных камер КНМ-5 для контроля буксовых узлов при движении поездов в разных направлениях по одному пути.
Рисунок 1 - Размещение двух напольных камер КНМ-5 для контроля буксовых узлов при движении поездов в разных направлениях по одному пути
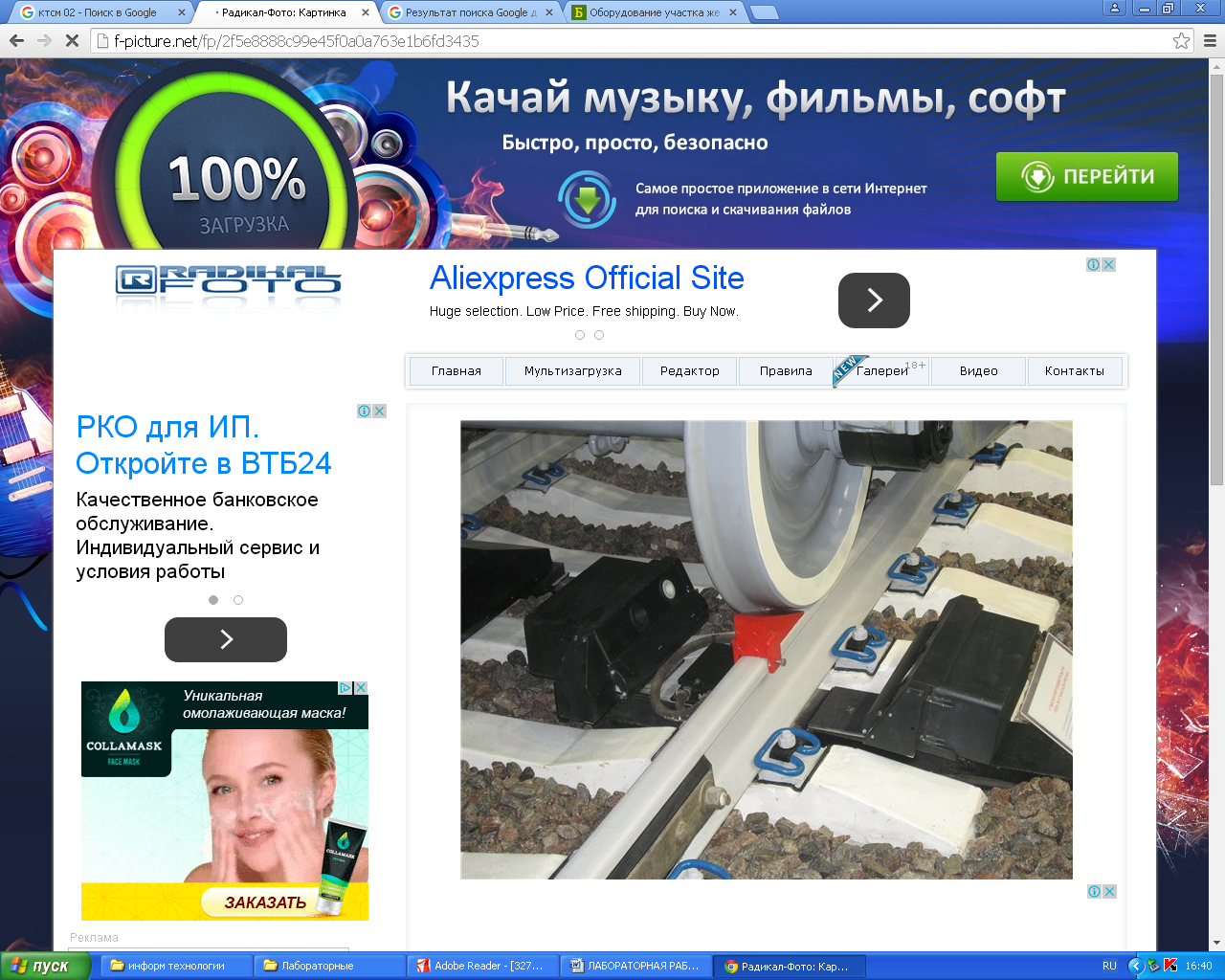
Напольные камеры, установленные в противоположном направлении относительно движения поезда, могут использоваться в качестве дублирующих, повышая тем самым общую надежность КТСМ. Информация о проконтролированных поездах может передаваться на АРМ ЛПК одной из двух станций прибытия в зависимости от направления движения поезда. Поскольку для таких технических решений требуется одно помещение (или модуль) на перегоне и один комплект устройств энергоснабжения, то затраты на дооборудование КТСМ-02 дополнительными камерами, монтаж и техническое обслуживание в процессе эксплуатации будут минимальны. Для обнаружения сползания корпусов «холодных» букс КТСМ-02 предлагается оснастить под системой размеренного контроля «Комплекс Б»(рисунок 2).
Рисунок 2- Обнаружение сползания корпусов «холодных» букс КТСМ-02 предлагается оснастить под системой размеренного контроля «Комплекс Б» Для перехода к измерению в градусах Цельсия на сети дорог обновляется программное обеспечение КТСМ-02, АРМ ЛПК и АРМ ЦПК. В него добавлены функции, обеспечивающие автоматический вывод результатов контроля в градусах Цельсия и в квантах для работы с КТСМ-01Д. Переход к измерению в градусах без изменения алгоритмов тревожной сигнализации, кроме некоторых преимуществ, создаст дополнительные сложности. Как известно, сигнал «Тревога 1» всегда равен 50 квантам. При измерении в градусах избыточная температура корпуса буксы, соответствующая «Тревоге Х», зависит от температуры наружного воздуха. Так при 0°С «тревожная» температура соответствует 44°С, при +40°С – 31°С, а при –40°С – 65°С. Результаты контроля уровней нагрева букс грузового вагона с подшипниками кассетного типа в квантах и градусах Цельсия средствами КТСМ-02 показаны на рисунке 3.
Рисунок 3- Результаты контроля уровней нагрева букс грузового вагона с подшипниками кассетного типа в квантах и градусах Цельсия средствами КТСМ-02
Рисунок 4- КТСМ-02 (волочение)
Рисунок 5- КТСМ-02(колесо)
Рисунок 6- Схема информационных потоков КТСМ-02
Достоинство этой системы – возможность ее расширения до пятнадцати разных подсистем. Линейные пункты предполагается комплектовать подсистемой контроля буксовых узлов и тормозов, а если необходимо, то и подсистемой контроля волочащихся деталей. Напольные камеры крепятся на рельс. Конструкция НК комплекса КТСМ-02 обеспечивает осмотр нижней и частично задней стенки корпуса буксового узла. Камера и букса перемещаются в одной системе координат, именно поэтому букса попадает в зону осмотра болометра.
Список использованных источников: 1. http://studopedia.org/5-21708.html 2. www.alltransportation.ru/tralls-392-2.html
ЛАБОРАТОРНАЯ РАБОТА № 4
|
||||
|
|
Последнее изменение этой страницы: 2017-01-20; просмотров: 367; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.20 (0.01 с.) |