
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Определение скорости резания стеблейСодержание книги
Поиск на нашем сайте
Из кинематики относительного движения ножа известно, что скорость относительного движения ножа изменяется в функции угла поворота wt:
- кривошипного вала аксиального кривошипно-ползунного механизма привода ножа Uн = r ∙w∙sinwt, (2) где: r - радиус кривошипа (r = S/2),м; w - угловая скорость кривошипа, с-1;
- ведущего вала механизма качающейся шайбы Uн = l∙ sin где: l -длина рычага колебательного вала МКШ, м
w-угловая скорость ведущего вала, с-1
-водила Н планетарного редуктора Uн= (r1+r2)∙wн ∙sinwн ∙t (4) где: r1 - радиус эксцентриситета (смещения) оси вала саттелита относи- тельно оси вращения водила, м r2 - радиус кривошипа вала саттелита, м wн - угловая скорость водила, с-1
Функциональную зависимость скорости относительного движения ножа от его перемещения (х) Uн = f(х) легко установить из рис. 2(а, б, в). Из точки В кривошипа определяется по выражению у = r∙sinwt. (5)
По аналогии из рисунков 2б и 2в следует, что у = l ∙sin у = (r1+r2)∙sinwн ∙t (7)
Рис. 2. К определению функциональной зависимости Uн = f(х)
Сопоставление выражений 2 и 5; 3 и 6; 4 и 7, показывает, что скорость движения ножа в любой точке в пределах хода S может быть определена как произведение текущей координаты ″у″ и постоянной величины w(wн), т.е. Uн = y∙w или Uн =у∙wн. Следовательно, дуга окружности радиуса r либо l sin Масштаб графика mu = w (mu = wн) С учетом этой зависимости определение скорости резания становится простой графоаналитической задачей. Для ее решения необходимо начертить в масштабе 1:1 контуры сегмента (рис. 3) и противорежущих пластин, причем сегмент должен находиться в одном из двух крайних положений (левом или правом). Для Р.А. нормального резания с одинарным и некратным ходом ножа достаточно изобразить контуры двух противорежущих пластин (рис. 3а,3г), а для аппаратов нормального резания с двойным пробегом ножа (2t = 2t0 = S - рис. 3б) и низкого резания (t = 2t0 = S - рис. 3в) - контуры трех пластин. Из точки А (начало лезвия сегмента) проведем оси координат (ХАУ) и отложим вдоль оси абсцисс величину хода ножа S = 2r. Из центра этого отрезка проводим дугу окружности радиуса r - график Uн А = f(х), (либо окружности радиусов l∙ sin Поскольку сегмент срезает стебли только на кромке противорежущей пластины, начало резания наступает тогда, когда точка А лезвия переместится в положение А1 (достигнет кромки противорежущей пластины), а все лезвие в положение А1В1. Скорость любой точки ножа в этот момент, в том числе и точки А, которой лезвие начинает срез стеблей, и есть скорость начала резания. Ее величина равна произведению длины ординаты у1 = А1К1 в метрах, восстановленной из точки А1 до пересечения с кривой графика UнА = f(х), и масштабного коэффициента mu = w, т.е. Uн 1 = у1∙w, м/с. (4) При ограничении рабочей высоты лезвия (hр) начало резания наступит когда точка А лезвия достигнет кромки противорежущей пластины. Проведя через точку пересечения лезвия (т.А) и кромки противорежущей пластинки линию параллельную АВ найдем положение лезвия А1В1 в момент начала резания, ординату у1=А1К1 и скорость начала резания Uн1=у1 w (Uн1=у1 ∙ wн) Значение угловой скорости w определяют по соотношению w = где: n - частота вращения кривошипного вала, мин-1. Или wн = где: n – число двойных ходов ножа, мин-1
Рис. 3. К определению скоростей резания: а) t = t0 =S; б) 2t = 2t0 =S; в) t = 2t0 =S, г) ″n″t=″n″t0=S. Лезвие сегмента при дальнейшем движении будет срезать стебли другими участками (точками) своей длины вплоть до крайней точки В. Поскольку скорость движения ножа меняется от 0 в начале хода до максимального значения (Uн мах = rw) в середине и снова до 0 в конце хода, скорости резания будут непрерывно меняться от найденной начальной Uн1 до конечной Uн2. Момент окончания резания наступит тогда, когда точка В лезвия сегмента достигнет кромки противорежущей пластины (точка В2), а само лезвие расположится по линии В2 А2. Скорость движения сегмента в данный момент - скорость конца резания - определим по графику Uн2 = y2 w (y2 = А2 К2), или (Uн2 = y2 wн). Из графика видно, что лезвие сегмента срезает растения только на участке А1 А2 своего хода. Этот участок хода является рабочим и обозначается хр. До него и после нож совершает холостой ход. У Р.А. нормального резания с двойным пробегом ножа - (2t = 2t0 = S - рис.3б) лезвие сегмента за один ход срезает растения у двух пальцев (1 и 2). По аналогии с рассмотренным выше начало резания у первого пальца соответствует положению лезвия А1В1, а конец резания - А2 В2. Скорость резания у первого пальца будет изменяться от Uн1 = y1 w до Uн2 = y2 w. Момент начала резания у второго пальца будет соответствовать положению лезвия А3 В3 и конца резания - А4 В4. Скорость резания у второго пальца будет изменяться от Uн3 = y3 w в начале до Uн4 = y4 w в конце резания. Из всего хода S нож совершает полезную работу на участках хр1 у первого и хр2 у второго пальцев, причем хр1 = хр2. Особенности соотношения параметров Р.А. низкого резания - (t = 2t0 = S - рис. 3в) обусловливают отсутствие участка холостого хода сегмента хн1 до начала резания стеблей у первого пальца, так как в крайних положениях сегмента часть его лезвия перекрывается противорежущей пластиной. Следовательно, участок лезвия вблизи точки А будет подходить к кромке противорежущей пластины первого пальца со скоростью Uн, близкой к нулю (начало хода ножа). Попадание стеблей на эту часть режущей пары будет приводить к повышенным силовым нагрузкам на элементы режущей пары и забиванию режущего аппарата. Для исключения возможности резания стеблей участком лезвия около точки А со скоростями ножа Uн, близкими к нулю, и тем самым предотвращения технологических и технических отказов в Р.А. низкого резания на стадии проектирования (разработки конструкции) предусматривают специальные конструктивные элементы, ограничивающие длину рабочей части лезвия участком А′В. Положение точки А′ по длине лезвия АВ устанавливают из условия Uн1 y1 Положение лезвия А1 В1, соответствующее моменту начала резания у первого пальца, найдем следующим построением. Отложим вдоль оси У ординату у1 и проведем из полученной точки прямую, параллельную оси абсцисс, до пересечения с восходящим участком кривой графика Uн А = f (х) в точке К1. Опустим из точки К1 перпендикуляр К1А1 на ось абсцисс. Проведем из полученной точки А1 линию, параллельную лезвию АВ, и отложим на ней отрезок А1В1, равный длине лезвия. Это и будет искомое положение лезвия, а точка А′ пересечения линии А1В1 и кромки противорежущей пластины будет началом рабочего участка лезвия. Следовательно, конструктивные элементы, ограничивающие минимальную скорость начала резания Uн1 и длину рабочего участка лезвий сегментов, располагаются на расстоянии l 0 от оси абсцисс (основания противорежущей пластины), а рабочая высота сегмента будет равна hp=h0 - l 0. Моменту конца резания у первого пальца будет соответствовать положение лезвия А2В2. Скорость конца резания у первого пальца Uн2 = у2·w. Резание стеблей у второго пальца начинается в момент, когда точка А′ достигнет кромки второй противорежущей пластины и лезвие займет положение А3В3, а закончится при достижении точкой В положения В4 (положение лезвия А4В4). Скорости резания стеблей у второго пальца будут изменяться от Uн3 = y3∙ Из графиков видно, что скорости резания стеблей лезвиями сегментов зависят не только от основных конструктивных (t, t0, S) и кинематических параметров (Uн), но и от взаиморасположения сегментов и пальцев в крайних положениях ножа. Полученные скорости резания для Р.А.№ 1;2;1**;2**;3;4;5; соответствуют совпадению в крайних положениях осей сегментов с осями пальцев после тщательного выполнения одной из основных регулировок - центрирование ножа или установки одинакового перебега (+D х) ножа в обоих крайних положениях для аппаратов ″n″t=″n″t0=S. На практике эти регулировки выполняют с большой погрешностью или не выполняют вовсе и оси сегментов в крайних положениях не совпадают (рис. 4) с осями пальцев на величину ±D х (+ D х - перебег влево от оси пальца; - D х - недобег до оси пальца), а у Р.А. ″n″t=″n″t0=S величины перебега сегмента различны у правого и левого пальцев.
Рис. 4. Варианты расположения осей сегментов и пальцев в крайнем левом положении ножа: а) - совпадение осей; б) - перебег (+ D х) влево от оси пальцев; в - недобег (- D х) до оси пальцев.
Величина перебега увеличивает, а недобега уменьшает холостой ход ̿Хн до начала резания и соответственно увеличивает (+ D х) и уменьшает (- D х) скорость начала резания у первого пальца. С другой стороны, перебег (+ D х) приводит к уменьшению, а недобег (- D х) к увеличению холостого хода после окончания резания. Следовательно, скорость конца резания у Р.А. t = t0 = S и скорость резания у вторых пальцев Р.А. 2t = 2t0 = S и t = 2t0 = S снижаются при + D х и возрастают при - D х. Особенно велико влияние перебега или недобега на изменение скоростей резания и надежность технологического процесса у Р.А. низкого резания.
|
||||
|
|
Последнее изменение этой страницы: 2016-12-12; просмотров: 491; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.137.170.76 (0.008 с.) |

 ∙
∙  ∙sinwt, (3)
∙sinwt, (3) ОВС (рис.2а) следует, что вертикальная текущая координата ″у″
ОВС (рис.2а) следует, что вертикальная текущая координата ″у″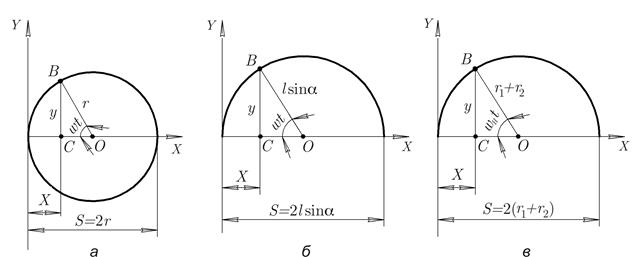
 .
.



 0, 5 м/с. При такой скорости начала резания стеблей лезвием у первого пальца ордината у1 на графике скоростей может быть определена по выражению
0, 5 м/с. При такой скорости начала резания стеблей лезвием у первого пальца ордината у1 на графике скоростей может быть определена по выражению , м.
, м. в начале до Uн4 = у4·w в конце резания.
в начале до Uн4 = у4·w в конце резания.



