Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Определение сил, действующих на нож режущего аппарата, и мощности на привод ножа. Построение диаграмм сил сопротивления движению ножа и мощности на его привод
При работе режущего аппарата на его нож (см. рис.13) действует сила сопротивления движению ножа Т и движущая сила R, приложенная к головке ножа от механизма привода через шатун: а) колебательный рычаг б) или шейку кривошипного вала в). Для устойчивой работы ножа и всего режущего аппарата необходимо постоянное соблюдение условия равновесия
где Сила сопротивления движению ножа Т складывается из трех составляющих:
где Р ср - среднее значение силы сопротивления стеблей срезу, Н; Среднее значение силы сопротивления растений срезу определяют по зависимости
где Z - количество сегментов на ноже; хр - длина пути, проходимого ножом (сегментом) от начала до конца резания, см; fн - площадь нагрузки режущего аппарата, см2.
а
б в
Рис.13(а, б, в). Схема сил, действующих на нож режущего аппарата б - МКШ в - планетарным
Для зерновых колосовых культур Для трав Количество сегментов Z на ноже определяют по выражению
где В - ширина захвата режущего аппарата; t - шаг режущей части.
Путь хр (перемещение), проходимый ножом от начала до конца резания, необходимо взять из диаграммы скоростей резания (рис.3) - расстояние А1А2 и А3А4. Поскольку в уравнение для определения Рср не входит независимая переменная х график этой силы - отрезок прямой линии, параллельной оси абсцисс (ОХ), в пределах рабочего перемещения сегмента (хр). Для режущих аппаратов 2t = 2t0 = S и t = 2t0 = S, у которых каждый сегмент при одном ходе срезает растения у двух пальцев с площадей fн1, и fн2, необходимо определять две силы сопротивления растений срезу: - у первого пальца - у второго пальца
На графике обе силы представлены отрезками прямых, параллельных оси абсцисс, в пределах рабочего хода х р1 (Рср1) и х р2 (Рср2). Силу инерции ножа в функции его перемещения
где mн = mн0В - масса ножа, кг (mн0 = 2…2,4 кг/м - масса одного метра длины ножа - удельная масса); В - ширина захвата режущего аппарата, м; r - радиус кривошипного вала механизма привода ножа, м; привода, с-1 Так как независимая переменная х входит в уравнение в первой степени и со знаком минус, функции
либо Рj0= mн ℓ (r1+r2) wн2 х = 2(r1+r2) Рjк = - mн (r1+r2) wн2
Сила трения ножа о элементы пальцевого бруса при кривошипно-ползунном механизме привода складываются из двух составляющих: Fтр = Fтр1 + Fтр2. (17) Составляющая Fтр1 возникает от силы тяжести ножа между соприкасающимися нижними поверхностями элементов движущегося ножа и верхними поверхностями неподвижных элементов пальцевого бруса. Ее величину находят по выражению Fтр1 = Gн f/, (18) где Gн = mнg - сила тяжести ножа, Н; f/ - коэффициент трения ножа по элементам пальцевого бруса. Значение коэффициента трения необходимо выбирать в пределах f ′ = 0,30…0,75 (трение стали по стали в абразивной среде и в условиях неучтенных защемлений от деформации ножа и пальцевого бруса). График силы Fтр1 - прямая линия, параллельная оси абсцисс. Составляющая Fтр2 возникает от прижатия головки ножа к направляющей корпуса жатки шатуном с силой N (см. рис.13). Fтр2 = Nf, (19) где f = 0,2…0,3 - коэффициент трения (сталь по стали в абразивной среде). Сила N прижатия головки ножа к направляющей
где В развернутом виде зависимости для нормальной силы имеют вид
а силы трения
Для построения графиков
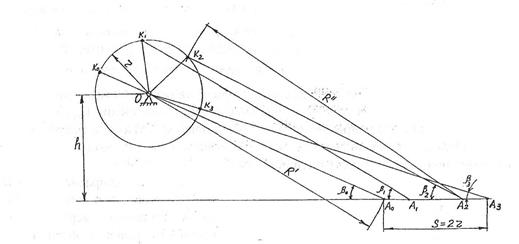
- начало хода (х = 0), - начало резания (х = хн), - конец резания (х = хк), - конец хода (х = S). У аппаратов нормального резания с двойным пробегом ножа (2t = 2t0 = S) и низкого резания (t = 2t0 = S) их шесть (см. рис.3б, в). К отмеченным четырем добавляются две: - начало (х = хн2) и конец (х = хк2) резания у второго пальца. Значения сил Рср, Рj и Fmp1 в каждой из характерных точек по ходу ножа берут из соответствующих графиков или рассчитывают, подставляя в зависимость Величину угла При построении схем механизмов привода ножа необходимо самостоятельно выбрать величину дезаксиала h = (2…3)r, либо h= (7…8)r. В зависимости от выбранного дезаксиала определить длину шатуна l: l = (9…10)r и l = (15...25)r Построение начинают с нанесения горизонтали (проекция плоскости режущего аппарата) и центра (0) кривошипного вала на выбранной высоте (дезаксиале h) от нее (рис.14). Масштаб построения от 1:2,5 до 1…5. Из центра 0 провести окружность радиуса r. Определить вспомогательный радиус R/ = l - r и им из центра 0 сделать засечку на горизонтали справа от центра. Полученная точка А0 будет левым крайним положением ножа. Соединяя полученную точку А0 с центром 0 прямой линией и продля линию за центр до пересечения с дугой окружности (точка к0) найдем положение всех звеньев механизма привода ножа (кривошип Ок0 и шатун к0А0 расположены по одной линии, но направлены в противоположные стороны) и угол наклона шатуна От точки А0 отложить вправо в выбранном масштабе величину хода ножа S = 2r и расстояние до точек начала и конца резания (А1 и А2 для аппарата t = t0 = S или А1, A2, A3, A4 - 2t = 2t0 = S и t = 2t0 = S), используя диаграммы скоростей резания (см. рис.3). Соединив центр 0 с точкой конца хода ножа (А3 - аппарат t = t0 = S или А5 - 2t = 2t0 = S и t = 2t0 = S), найдем положение механизма привода в крайнем правом положении ножа (кривошип Ок3 или Ок5 и шатун к3А3 или к5А5 расположены по одной линии и направлены в одну сторону) и величину угла
Рис.14. Схемы механизма привода ножа
Затем вспомогательным радиусом R// = l из точек А1 и А2 (t = t0 = S) или из точек А1, A2, A3 и A4 (2t = 2t0 = S и t = 2t0 = S), как из центров, сделать засечки на дуге окружности кривошипного вала. Соединив найденные точки к1, к2 (к1, к2, к3 и к4) прямыми линиями с центром кривошипного вала (0) и точками А1, A2 (А1, A2, A3, A4), получим положения механизма привода в точках начала и конца резания ножа, а также искомое значение угла Поскольку силы сопротивления растений срезу возникают в начале и перестают действовать в конце резания значение силы Fmp2 в каждой из точек А1 и А2 (аппарат t = t0 = S) или А1,A2,A3 и A4 (аппараты 2t = 2t0 = S и t = 2t0 = S) необходимо считать по два раза - бесконечно близко слева и бесконечно близко справа от точки.
ПРИМЕР. Режущий аппарат t = t0 = S.
Таким образом, для аппаратов t = t0 = S силу трения Fmp2 необходимо считать минимум шесть, а для 2t = 2t0 = S и t = 2t0 = S - десять раз. Алгебраическая сумма сил (
Отрицательное значение суммы сил означает, что привод не толкает, а тормозит нож, движущийся под действием силы инерции (- Pj).
Последовательное соединение нанесенных точек значений Fmp2 прямыми линиями даст график
Рис.15. Схема сил, действующих на нож: а - в начале хода; б - в конце хода; 1 - шатун; 2 - головка ножа; 3 - направляющая
У Р.А. с МКШ силой Fтр2 можно пренебречь, а при планетарном механизме привода она просто не возникает, что упрощает расчет. Силу сопротивления движению ножа Т определяем алгебраическим суммированием значений всех составляющих в тех же характерных точках.
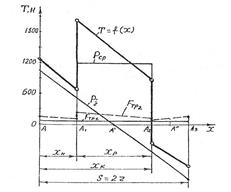
Для аппаратов t = t0 = S ее необходимо определить минимум 6 раз, а для 2t = 2t0 = S и t = 2t0 = S - 10 раз. По полученным значениям силы Т и ее составляющих строим диаграмму сил, действующих на нож (рис.16). Масштаб изображения графиков сил должен быть таким, чтобы максимальная ордината (
Мощность на привод ножа находят по зависимости
N = TUн (22)
Значения силы Тi берут для каждой характерной точки в пределах хода ножа из диаграммы сил (рис.16), а скорости Uнi - из диаграммы скоростей резания (рис.3). По данным расчетов построить диаграмму изменения мощности на привод ножа в функции его перемещения (рис.17).
Масштаб диаграммы мощностей μN должен выбираться из ряда 10, 20, 30…Вт/мм, причем наибольшая ордината уmax= Nmax/ μN должна быть не более 110…120 мм.
Для уточнения вида диаграммы необходимо подсчитать значения N минимум в двух дополнительных точках: С целью упрощения процедуры расчетов и построения графиков, повышения наглядности и исключения ошибок диаграммы скоростей резания, сил, действующих на нож, и мощности на привод ножа желательно размещать друг под другом с расположением одноименных характерных точек на общих для трех диаграмм вертикалях. Результаты силовых и мощностных расчетов являются исходными данными для прочностных расчетов элементов механизма привода ножа, определения момента инерции маховика, подбора энергосредства или трансмиссии от источника энергии (трактор, двигатель) к механизму привода ножа.
1.7. Дополнительное задание к вариантам с Т.Р.А. №6, №7.
В вариантах №6 с приводом ножа – механизм качающейся шайбы (МКШ) необходимо вычертить схему механизма и произвести анализ необходимого регулирования положения качающейся шайбы 2 на наклонной шейке ведущего вала 1 при заданном биении торца колебательного вала 3.
Рис. …… Схема МКШ закрытого типа с горизонтальным колебательным валом: 1- ведущий вал с наклонной шейкой 2 – качающаяся шайба 3 – колебательный вал с вилкой и рычагом 4 – соединительное звено 5 – нож 6 – корпусные элементы
Главной задачей регулирование МКШ является обеспечение прохождения оси АВ цапф качающейся шайбы 2 через точку пересечения ″О″ оси вращения ведущего вала 1 и оси его наклонной шейки (под углом α). Если это условие выполняется (все три оси пересекаются в точке ″О″), то биение качающейся шайбы (круговое) и колебательного вала (осевое) отсутствует и размер ″К″ от торца колебательного вала до корпуса МКШ во всем диапазоне колебаний (2α) остается постоянным. Смещение оси АВ цапф качающейся шайбы на величину +Δх в положении А′В′ или на величину – Δх в положении А″В″ приведет к смещению центра качающейся шайбы от оси вращения вала 1 на радиус r′э. Аналогично смещение оси АВ на величину – Δх в положении А″В″ приведет к смещению центра качающейся шайбы на величину r″э. Величина rэ может быть определена как: rэ = Δх sinα. Появление радиуса эксцентриситета r′э или r″э приведет к круговому биению качающейся шайбы с амплитудой А = 2rэ и осевому биению колебательного вала с такой же амплитудой. Смещения + Δх и – Δх устраняют изменением толщины комплекта прокладок λ между торцом накладной шейки вала 1 и внутренней обоймой конического подшипника (правого). Увеличивая толщину λ комплекта прокладок уменьшают смещение – Δх, а уменьшая λ – уменьшают смещение + Δх. Направление смещения оси АВ определяют следующим образом. Устанавливают, поворачивая ведущий вал (по ходу вращения), колебательный вал с рычагом в крайнее положение (см.рис….) и замеряют с точностью до 0,1 мм. расстояние ″К″. затем поворачивают в том же направлении ведущий вал на угол ωt = п/2.(рычаг колебательного вала должен находиться в среднем положении) и снова замеряют расстояние К′ или К.″
Если К′ = К или К″ = К + Δх = – Δх = 0 и МКШ регулировать не нужно. При К′ > К радиус эксцентриситета r′э = К′ - К, а смещение оси АВ от точки ″О″ + Δх = r′э /sinα. При К″ < К радиус эксцентриситета r″э = К - К″ и смещение оси АВ от точки ″О″ – Δх = r″э /sinα.
В первом случае (К′ > К) необходимо демонтировать из корпуса МКШ ведущий вал вместе с колебательным валом. Демонтировать с наклонной шейки качающуюся шайбу с обоими коническими подшипниками и колебательным валом и уменьшить толщину λ комплекта прокладок на величину Z′э /sinα. (т.е. оставить комплект прокладок толщиной λ - Z′э /sinα). После чего необходимо установить качающуюся шайбу (с колебательным валом в сборе) на наклонную шейку ведущего вала, отрегулировать конические подшипники шайбы и полностью собрать МКШ. Во втором случае К″ < К необходимо выполнить перечисленные демонтажные работы, затем довести толщину комплекта прокладок до λ + Z″э /sinα и провести все монтажно-регулировочные операций.
*Не выполнение или небрежное выполнение этой регулировки приводит к тяжелейшим поломкам МКШ.
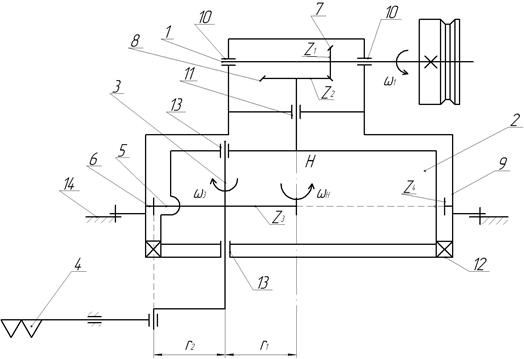
В вариантах №7 с планетарным механизмом привода ножа необходимо построить траекторию абсолютного движения оси шейки кривошипа вала саттелита и установленного на ней подшипника головки ножа (рис………).
Рис……Схема планетарного привода ножа: 1-ведущий вал 2-водило 3-вал саттелита 4-нож 5-саттелит 6-неподвижное зубчатое колесо с внутренними зубьями 7, 8-зубчатые конические колеса 9-корпус редуктора 10-подшипники ведущего вала 11, 12-подшипники водила 13-подшипники вала саттелита 14-корпус жатки
В существующих планетарных приводах, которыми в основном комплектуются режущие аппараты системы Schumacher (применяется на ряде зарубежных и новых отечественных зерноуборочных комбайнах Vector 410, 420; Acros 530, 540, 560; Torum 740 валковой жатке ЖХТ-18 и других машинах), ведущий вал вращается против хода часовой стрелки (вид сверху) и вал саттелита – по ходу часовой стрелки (вид сверху). Для уменьшения крутящего момента передаваемого клиноременной передачей число зубьев Z1 ведущего колеса 7 меньше числа зубьев Z2 у колеса 8 (Z1 <Z2). Число зубьев Z4 неподвижного колеса 6 планетарной передачи в 2 раза больше числа зубьев Z3 саттелита т.е. Z4 = 2Z3 х. Поэтому угловая скорость вала саттелита в два раза превышает угловую скорость водила Н ω3 = 2ωн. Радиус смещения оси вала саттелита относительно оси вращения водила Н - r1 равен радиусу кривошипа r2 вала саттелита. Так как ход ножа S = 2 (r1 + r2) = 84мм. то r1 = r2 = 21мм. При равенстве r1 = r2 траекторией абсолютного движения оси шейки кривошипа вала саттелита, а следовательно и оси подшипника головки ножа будет отрезок прямой линии, равный ходу ножа S = 2 (r1 + r2) Построение траектории абсолютного движения оси шейки кривошипа вала саттелита необходимо начать с вычерчивания двух полуокружностей радиусов r1 + r2 и r1 из центра ″О″и водила Н, расположенного на оси х на расстоянии r1 + r2 от начала координат.
Разделим обе полуокружности на одинаковое количество равных частей (достаточно на 6 частей) обозначим буквами О′о и О″о положение осей вала саттелита(О′) и шейки кривошипа вала саттелита(О″), соответствующих углов поворота водила Н, wнtо = 0 При повороте на уго wнt1 = 30° ось вала саттелита займет положение О1′. За это же время вал саттелита, вращаясь в противоположном направлении с угловой скоростью w3=2wн , повернется относительно оси О′1, на угол w3t1 = 2 wнt1 = 60° и ось шейки кривошипа О″ из положения О0″ перейдет в положение О1″. Точка О1″лежит на оси х (как и точка Оо″). Это следует из рассмотрения ΔОО1′О1″. В этом равнобедренном треугольнике один угол (вершина О) по условию равен wнt1 = 30°, второй (вершина О′1) между равными сторонами ОО1′ и О1′О1″ равен 180 - (2 wнt1 = 60°) = 120°. Следовательно и третий угол с вершиной О1″ равен 30°. Повороту водила Н на угол wнt2 = 60° будет соответствовать поворот вала саттелита вокруг оси О′2 по направлению часовой стрелки на угол ω3t2 = 2ωнt2 = 120° и ось шейки кривошипа переместиться из точкиО″1 в точку О″2, совпадающую с точкой О′о. Это утверждение следует из рассмотрения равнобедренного треугольника ОО′2О″2. В нем угол при вершине О равен по условию 60°, угол при вершине О′2 равен 180-120 = 60°. Естественно третий угол также равен 60°. Следовательно треугольник ОО′2О″2 равносторонний и сторона ОО″2 = r1=r2= ОО′0. Повороту водила на углы ωнt3=90°; ωнt4 =120°; ωнt5 = 150° и ωнt6 =180° будут соответствовать углы поворота вала саттелита относительно осей О′3, О′4, О′5, О′6 в противоположном направлении соответственно на углы - ω3t3 = 2ωнt3 = 180°; ω3t4 = 2ωнt4=240°; ω3t5 = 2ωнt5=300° и ω3t6 = 2ωнt6=360°. Соответственно ось шейки кривошипа из положения О″2 переместится в точку О″3 совпадающую с центром О, далее в точку О″4 совпадающую с точкой О′6, затем в точку О″5 и наконец в точку О″6. Студент может самостоятельно убедиться, рассмотрев по аналогии с вышеизложенным, равносторонний или равнобедренный треугольники ОО′4О″4 И ОО′5О″5.
*Построенную траекторию выделить утолщенной линией.
|
|||||||||||
|
|
Последнее изменение этой страницы: 2016-12-12; просмотров: 1002; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.223.159.195 (0.108 с.) |
 (
( )
) - значение модуля силы сопротивления движению ножа в любой точке по его ходу;
- значение модуля силы сопротивления движению ножа в любой точке по его ходу;  - значение модуля горизонтальной составляющей движущей силы в той же точке по ходу ножа. (R- значение движущей силы)
- значение модуля горизонтальной составляющей движущей силы в той же точке по ходу ножа. (R- значение движущей силы) , (13)
, (13) - сила инерции ножа, Н; F тр - сила трения ножа о пальцевый брус, Н.
- сила инерции ножа, Н; F тр - сила трения ножа о пальцевый брус, Н. , (14)
, (14) - удельная работа на срез растений с единицы площади (м2, см2);
- удельная работа на срез растений с единицы площади (м2, см2);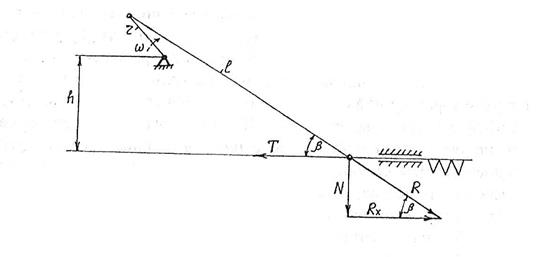

 или
или 
 или
или 
 (15)
(15) ;
; .
. находят по зависимости
находят по зависимости  , 16 а
, 16 а , 16 б
, 16 б , 16 в
, 16 в - угловая скорость кривошипного вала, с-1; ℓ- длина колебательного рычага МКШ, м; α- угол отклонения наклонной шейки ведущего вала МКШ, град; (r1 + r2) – сумма радиусов планетарного привода, м; wн – угловая скорость водила планетарного
- угловая скорость кривошипного вала, с-1; ℓ- длина колебательного рычага МКШ, м; α- угол отклонения наклонной шейки ведущего вала МКШ, град; (r1 + r2) – сумма радиусов планетарного привода, м; wн – угловая скорость водила планетарного линейные убывающие. Для построения графика изменения силы инерции в функции перемещениях ножа (прямая линия) достаточно определить значения
линейные убывающие. Для построения графика изменения силы инерции в функции перемещениях ножа (прямая линия) достаточно определить значения  в двух точках по ходу ножа, например в точке А: х = 0 (начало хода) и Ак: х = 2r либо х =2ℓsinα либо х =2(r1+r2) (конец хода):
в двух точках по ходу ножа, например в точке А: х = 0 (начало хода) и Ак: х = 2r либо х =2ℓsinα либо х =2(r1+r2) (конец хода):

 .
. х = 2ℓ sinα Рjк = - mн ℓ sinα wн2
х = 2ℓ sinα Рjк = - mн ℓ sinα wн2  или с учетом условия
или с учетом условия  ,
, - угол наклона шатуна к плоскости режущего аппарата.
- угол наклона шатуна к плоскости режущего аппарата. , (20)
, (20) . (21)
. (21) и
и  значения составляющей
значения составляющей  необходимо определить хотя бы в характерных точках одного хода ножа. У аппарата нормального резания с одинарным пробегом ножа (t = t0 = S) таких точек четыре (см. рис.3а):
необходимо определить хотя бы в характерных точках одного хода ножа. У аппарата нормального резания с одинарным пробегом ножа (t = t0 = S) таких точек четыре (см. рис.3а): (h = (2...3)r)
(h = (2...3)r) .
. или
или  .
.
 ,
,  (
( ).
). ;
;  ;
; ;
;  .
. ) При отрицательном значении алгебраической суммы (
) При отрицательном значении алгебраической суммы ( ) необходимо брать ее модуль.
) необходимо брать ее модуль. ) может иметь как положительное (первая половина хода ножа, а также в пределах хр во второй половине хода), так и отрицательное значение (за пределами участка хр во второй половине хода, где
) может иметь как положительное (первая половина хода ножа, а также в пределах хр во второй половине хода), так и отрицательное значение (за пределами участка хр во второй половине хода, где  ). Если указанная сумма сил имеет положительное значение, то сила Rx (рис.15а) направлена в сторону движения ножа, а нормальная сила N вниз, прижимая головку к направляющей. Сила трения Fmp2 возникает между поверхностью направляющей и нижней поверхностью головки ножа.
). Если указанная сумма сил имеет положительное значение, то сила Rx (рис.15а) направлена в сторону движения ножа, а нормальная сила N вниз, прижимая головку к направляющей. Сила трения Fmp2 возникает между поверхностью направляющей и нижней поверхностью головки ножа.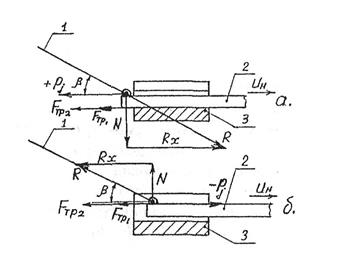 Cила Rx направлена против вектора скорости ножа, а сила N - вверх прижимая верхнюю поверхность головки ножа к направляющей. Сила трения Fmp2 возникает между второй парой трущихся поверхностей (рис.15б). Направление же силы трения и ее знак + в пределах всего хода ножа остаются неизменными.
Cила Rx направлена против вектора скорости ножа, а сила N - вверх прижимая верхнюю поверхность головки ножа к направляющей. Сила трения Fmp2 возникает между второй парой трущихся поверхностей (рис.15б). Направление же силы трения и ее знак + в пределах всего хода ножа остаются неизменными. ) силы Т (обычно значение
) силы Т (обычно значение - бесконечно близко справа от точки А1) была около 100…120 мм, т.е.
- бесконечно близко справа от точки А1) была около 100…120 мм, т.е.  , Н/мм. Причем μт должен выбираться из ряда 10, 20, 30 и.д. (Н/мм). Тогда ординаты графиков сил Рср, Fтр1, Fтр2,Pj, в любой точке будут определяться
, Н/мм. Причем μт должен выбираться из ряда 10, 20, 30 и.д. (Н/мм). Тогда ординаты графиков сил Рср, Fтр1, Fтр2,Pj, в любой точке будут определяться  , мм.
, мм.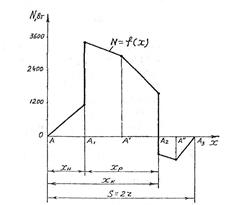
 и
и  .
.