Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
П'єзоелектричні перетворювачіСодержание книги Похожие статьи вашей тематики
Поиск на нашем сайте
П'єзоелектричні перетворювачі засновані на використовуванні п'єзоелектричного ефекту (п'єзоефекту), яким володіють деякі кристали.
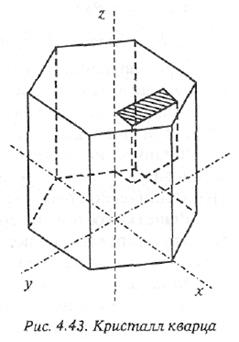
П'єзоефект найсильніше виражений у кварцу, турмаліну і у сегнетоелектриків: сегнетової солі, титанату барію і ін. На рис. 4.43 показаний кристал кварцу з наступними осями симетрії: z — головна, або оптична, вісь; х — електрична вісь; у — механічна, або нейтральна, вісь.
При дії сили FХ уздовж електричної осі х на гранях ABCD і EKGH, перпендикулярних осі х, виникають різнополярні електричні заряди. Величина цих зарядів qx не залежить від геометричних розмірів п’єзочутливого елементу і визначається залежністю де kП — п’єзомодуль матеріалу. П’єзомодуль характеризує чутливість п'єзоелектричного матеріалу і визначає величину електричного заряду, що виникає при додатку певної сили. Зміна знаку прикладеної сили Fx призводить до зміни знаку зарядів. Розглянутий ефект називається подовжнім п’єзоефектом. При дії сили F, направленої уподовж осі у, на тих же гранях виникають також різнополярні заряди (поперечний п'єзоефект), величина яких залежить від прикладеної сили і геометричних розмірів граней:
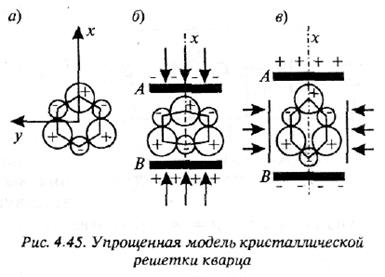
де Sx, Sy — площі граней, перпендикулярних осям х, у. При поперечному п'єзоефекті знак зарядів протилежний знаку зарядів, що виникають при подовжньому п'єзоефекті під впливом сил того ж напряму. При дії сили уздовж осі z п'єзоефект не спостерігається. Фізичні процеси, що відбуваються в п'єзоелектричному перетворювачі, можна пояснити, розглядаючи спрощену модель кристалічної решітки кварцу. Решітка складається з трьох атомів кремнію і шести атомів кисню, згрупованих попарно. Атом кремнію несе чотири позитивні заряди, а атом кисню — два негативних. Кристалічна решітка утворює шестигранник рис. 4.45, а.
У ненапруженому стані всі заряди компенсуються. При стискуванні уздовж осі х відбувається деформація кристала, і він стає поляризованим рис. 4.45, б. Додаток зовнішньої сили уздовж осі у також викликає поляризацію кристала мал. 4.45, в. Зміна напряму сил спричинить зміну знаків зарядів. Значення заряду при подовжньому стискуванні пропорційне тиску, який рівний
де S — площа грані А. З другого боку, значення заряду на грані А також пропорційно тій же площі. Тому при подовжньому п'єзоефекті значення зарядів не залежить від геометричних розмірів п'єзоелектричного елементу. Площа граней А і В, на яких виникають заряди, не рівні площам граней С і D, тому при поперечному п'єзоефекті значення зарядів залежить від співвідношення площ граней А і С. При стискуванні уздовж осі у тонка кристалічна пластина легко згинається, тому поперечний п'єзоефект застосовується украй рідко в датчиках тиску і високочутливих датчиках зусиль. Розглянемо еквівалентну схему п'єзоелектричного перетворювача (рис. 4.46). Напруга між гранями п’єзочутливого елементу в режимі холостого ходу при подовжньому п'єзоефекті рівна
де Сп = εSx/d — ємкість перетворювача; ε — діелектрична постійна матеріалу перетворювача; d — товщина перетворювача. Навантаження, що підключається до п'єзоелектричного перетворювача, характеризується активним опором RH і місткістю СН, залежною від ємкості кабельної лінії і ємкості вхідного ланцюга навантаження. Власний опір RП п’єзоелементу визначається питомим опором матеріалу пластин і їх поверхневим опором. В основному RП залежить від поверхневого опору, для підвищення якого перетворювач необхідно герметизувати. Вираз для вихідної напруги, записане в операційній формі, має наступний вигляд:
де — еквівалентний опір.
Використовуючи (4.28), одержимо
Знайдемо два граничні значення вихідної напруги, відповідні t = 0 і t =∞. Як видно з (4.31), при р= ∞, що відповідає t = 0, вихідна напруга
При постійному значенні прикладеної сили і р = 0, що відповідає t = ∞, вихідна напруга рівна нулю. Тому розглянуті п'єзоелектричні перетворювачі застосовуються для вимірювання змінних зусиль. При постійній величині докладеного зусилля Fx на гранях п’єзоелементу виникає постійний заряд, величина якого через недосконалість ізоляції з часом прагне до нуля. Витік заряду при динамічному характері докладеного зусилля Fx не має великого значення, оскільки під дією змінних сил кількість електрики весь час поповнюється. Чутливість п'єзоелектричного перетворювача рівна
Для підвищення чутливості перетворювач виконують з декількох пластин, маючи в своєму розпорядженні їх стовпчик і сполучаючи паралельно. При такому виконанні перетворювача
де n — число пластин.
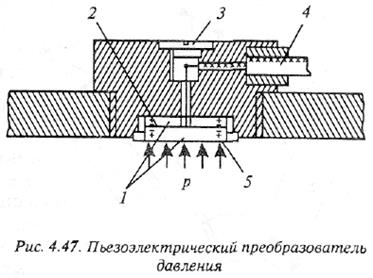
Сегнетова сіль має п’єзомодуль kп = 300 • 10-2Кл/Н, робочий температурний діапазон від -15 до 22,5 ºС. Сильна залежність п’єзомодуля від температури, мала міцність і гігроскопічність обмежують застосування сегнетової солі. В даний час промисловістю розроблені нові п'єзоелектричні матеріали з робочим температурним діапазоном до 200 ºС і високим значенням пьезомодуля. Мале значення вихідної напруги і великий внутрішній опір п'єзоелектричних перетворювачів вимагають застосування підсилювачів з великим вхідним опором. На рис. 4.47 схематично зображено Устрій п'єзоелектричного перетворювача тиску. Перетворювач складається з двох кварцових пластин 1, сполучених паралельно. Зовнішні грані пластин заземляються, а між середніми гранями знаходиться латунна фольга 2. Тиск на кварцові пластини передається через мембрану 5. Вихідна напруга з кварцових пластин знімається екранованим кабелем 4. Для з'єднання кабелю з латунною фольгою є отвір, що закривається пробкою 3.
Ємкісні перетворювачі Принцип дії перетворювачів ємкостей заснований на залежності ємкості конденсатора від його геометричних розмірів, форми, відстані між його обкладаннями і від діелектричної проникності середовища. У перетворювачах ємкостей звичайно використовуються плоскопаралельні або циліндрові конденсатори. Живлення здійснюється від мережі змінного струму. Ємкість плоскопаралельного конденсатора визначається виразом
де ε0 — електрична постійна, рівна 8,85 • 10-12 Ф/м; εr — відносна діелектрична проникність середовища; S — площа обкладань; d — відстань між обкладаннями. Як видно з (4.35), ємкість перетворювача залежить від S, d, εr. Кожна з цих величин може бути вхідною величиною перетворювача. При зміні площі взаємного перекриття пластин ємкість змінюється по лінійному закону. Ємкісні перетворювачі із змінною площею перекриття використовуються як датчики кутових переміщень (мал. 4.48). В цьому випадку ємкість перетворювача рівна
де r1 і r2 — зовнішній і внутрішній радіуси обкладань; α0 — початковий кут перекриття.
Із зміною відстані d між обкладками (рис. 4.49) ємкість конденсатора змінюється по гіперболічному закону:
При малих переміщеннях x << d можна нехтувати величиною (x/d)2, тоді
де
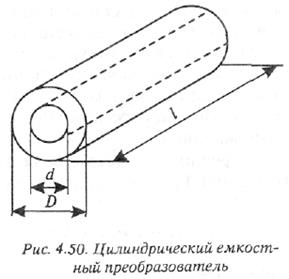
Ємкісні перетворювачі, ємкість яких змінюється залежно від діелектричної проникності середовища, використовуються як датчики рівня, вологості, складу речовини і товщини діелектричних матеріалів. Ємкість циліндрового перетворювача (рис. 4.50)
де l,d,D — геометричні розміри перетворювача.
Циліндрові перетворювачі застосовуються на судах як датчики рівня рідини. По конструктивних міркуваннях ємкість більшості перетворювачів складає 10 — 200 пФ. На низьких частотах опір перетворювачів ємкостей досягає декількох мегом і стає сумірним з опором ізоляції. Для зменшення опору перетворювачі ємкостей живлять від високочастотного джерела змінного струму (від одиниць кілогерц до десятків мегагерц). Навіть на високих частотах вихідний опір перетворювачів ємкостей великий і вихідна потужність мала, тому перетворювачі працюють з підсилювачами. Щоб зменшити вплив наведень, перетворювач підключають до підсилювача екранованим кабелем. Ємкість кабельної лінії негативно позначається на роботі перетворювача, знижуючи його чутливість і точність. Для зменшення впливу кабельної лінії схему перетворення вихідного сигналу перетворювача ємкості розташовують в безпосередній близькості від нього. Коливання температури і вологості навколишнього середовища також роблять шкідливий вплив на роботу перетворювача ємкості, призводячи до змін d і εr. Для зменшення температурної погрішності обкладання перетворювачі виконують із сплавів з малим температурним коефіцієнтом лінійного розширення. Для усунення впливу вологості застосовують герметизацію перетворювачів ємкостей. Перетворювачі ємкостей мають малу масу і габарити, володіють високою чутливістю. До недоліків перетворювачів ємкостей слід віднести необхідність посилення вихідного сигналу і захисту від впливу паразитних ємкостей, застосування високочастотного джерела живлення. Перетворювачі ємкостей практично безінерційні. Тахогенератори Загальні відомості. Тахогенераторами називаються електричні машини, що служать для перетворення механічного переміщення валу в електричний сигнал — вихідну напругу. Закон перетворення механічної величини в електричну визначається статичною характеристикою тахогенератора. Рівняння статичної характеристики ідеального тахогенератора має наступний вигляд:
де ω — кутова швидкість валу; α — кут повороту валу. По роду струму тахогенератори підрозділяються на тахогенератори постійного і змінного струму. До тахогенераторів пред'являються наступні основні вимоги: 1) лінійність вихідної характеристики; 2) велика крутизна вихідної характеристики; 3) мала амплітудна погрішність; 4) мала фазова погрішність (для тахогенераторів змінного струму); 5) мінімальна пульсація вихідної напруги (для тахогенераторів постійного струму); 6) малий момент інерції ротора і мала електромагнітна постійна часу; 7) стабільність вихідної характеристики; 8) малі маса і габарити. У суднових системах контролю і регулювання тахогенератори застосовуються для вимірювання частоти обертання гребних валів, головних і допоміжних силових двигунів, а також для здійснення зворотного зв'язку по частоті обертання і для введення сигналу по похідній від кута повороту в автоматичних системах регулювання. Тахогенератори постійного струму. Тахогенератори постійного струму є генераторами постійного струму невеликої потужності з електромагнітним (рис. 4.51) або магнітоелектричним збудженням. У режимі холостого ходу при постійному магнітному потоці збудження Фв вихідна напруга тахогенератора рівна ЕРС:
де к = сФв. Статична характеристика 1, відповідна режиму холостого ходу (Rн = ∞), показана на рис. 4.52. При підключенні навантаження напруга зменшується на величину падіння напруги в ланцюзі якоря:
де Iя = Uвых/RH; RH – опір навантаження; R – опір ланцюга якоря, рівний сумі опорів обмотки якоря Rя і переходу щітки — колектор Rщ, З урахуванням (4.38) одержимо рівняння для вихідної напруги
Із рівняння (4.39) видно, що вихідна напруга змінюється по лінійному закону у функції частоти обертання ω. Нахил вихідної характеристики залежить від опору навантаження (порівняти криві 2, 3 на рис. 4.52). Зменшення опору навантаження (Rн2 < Rн1) призводить до зменшення крутизни вихідної характеристики. Рівняння (4.39) одержане без урахування впливу реакції якоря і постійної величини падіння напруги на переході щітки — колектор. З урахуванням реакції якоря результуючий магнітний потік Ф = Фв - Фр,
Потік реакції якоря змінюється пропорційно струму Iя, тому
ЕРС тахогенератора при навантаженні визначається виразом
Для графітних щіток постійним слід рахувати не опір переходу щітки — колектор R, а падіння напруги U на ньому. Вихідна напруга тахогенератора при навантаженні визначається рівнянням
Перетворюючи рівняння (4.41) з урахуванням (4.40), одержимо
З одержаного виразу видно, що статична характеристика є нелінійною і має зону нечутливості від ω = 0 до ωЗ.Н (див. рис. 4.52). Нелінійність вихідної характеристики 4 пояснюється впливом реакції якоря. Відхилення вихідної характеристики від лінійного закону збільшується із зростанням кутової швидкості з і зменшенням опору навантаження. Для зменшення нелінійності вихідної характеристики слід використовувати невеликий діапазон частоти обертання і навантажувати тахогенератор великим опором. Зона нечутливості з'являється за рахунок падіння напруг на переході щітки — колектор. У зоні нечутливості ЕРС тахогенератора менше падіння напруги на переході щітки — колектор (kω < Uщ), тому вихідна напруга рівна нулю. Для зменшення зони нечутливості в тахогенераторах встановлюють мідно-графітні або срібно-графітні щітки. У тахогенераторах з електромагнітним збудженням зміна "температури навколишнього середовища призводить до зміни опору обмотки збудження і, отже, струму збудження. Для зменшення температурної погрішності магнітну систему тахогенератора роблять насиченою і робочу крапку вибирають за коліном кривої намагнічування. В цьому випадку зміна струму збудження майже не впливає на значення магнітного потоку тахогенератора. У перехідному режимі рівняння для ланцюга якоря тахогенератора без урахування реакції якоря і падіння напруги на переході щітки — колектор має вигляд
де е — миттєве значення ЕРС; uВЫХ — миттєве значення вихідної напруги; LЯ — індуктивність обмотки якоря; iЯ — миттєве значення струму якоря. Перетворюючи рівняння (4.42) з урахуванням (4.38) і рівність iЯ = uвых/Rн, одержимо
Введемо позначення:
З урахуванням цих позначень запишемо
або
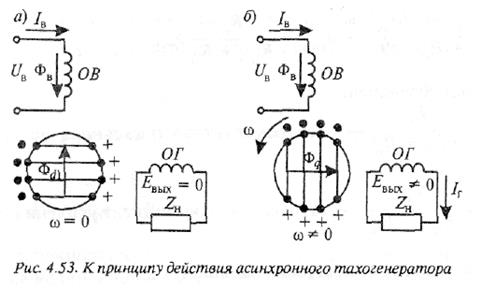
З рівнянь видно, що якщо вхідною величиною є кутова швидкість якоря, то тахогенератор є аперіодичною ланкою першого порядку, якщо ж вхідною величиною є кут повороту, то тахогенератор є реальною диференцюючою ланкою. Основні переваги тахогенератора постійного струму полягають у відсутності фазових погрішностей і високої чутливості. До недоліків тахогенератора відносяться наявність щіток і колектора, які приводять до зниження надійності, а також пульсації вихідної напруги і радіоперешкоди. Асинхронний тахогенератор. Конструкція асинхронного тахогенератора не відрізняється від конструкції двофазного асинхронного виконавчого двигуна з порожнистим ротором. Порожнистий ротор тахогенератора виконується з високоомних матеріалів (константану, манганіну і ін.), опір яких мало змінюється під впливом температури. На статорі є дві обмотки, здвинуті в просторі на 90° (рис. 4.53). На обмотку збудження ОЗ подається напруга UB від мережі змінного струму. З генераторної обмотки ОГ знімається вихідний сигнал. Обмотка збудження створює пульсуючий магнітний потік Фв, направлений по подовжній осі машини. При нерухомому роторі магнітний потік ФB наводитиме трансформаторну ЕРС ЕТР в порожнистому роторі як у вторинній обмотці трансформатора. Порожнистий ротор можна вважати таким, що складається з елементарних провідників, замкнутих накоротко на торцях. Контури струмів, обумовлених трансформаторною ЕДС, розташовуються в площинах, перпендикулярних подовжній осі машини (рис. 4.53, а). Ці струми створюють магнітний потік Фd1, направлений, згідно правилу Лінь, назустріч магнітному потоку Фв. Теоретично в результаті взаємодії магнітних потоків при нерухомому роторі (ω = 0) у тахогенераторі створюється магнітний потік Фd, направлений по подовжній осі, тому в генераторній обмотці, розташованій по поперечній осі, ЕРС наводитися не буде (Евыx = 0). Проте через несиметрію магнітного ланцюгу, несиметрію порожнистого ротор, а також неточність зрушення обмоток в просторі на виході тахогенератора є невелика напруга, звана залишковою.
При обертанні ротора (ω ≠ 0) в його елементарних провідниках наводиться ЕРС обертання ЕBP, рівна
де k1 — коефіцієнт, залежний від конструктивних параметрів тахогенератора. Під дією ЕРС обертання по ротору протікають струми I, контури яких при великому активному опорі ротора розташовуються в площинах, паралельних подовжній осі (рис. 4.53, б). Ці струми створюють магнітний потік Фq, направлений по поперечній осі. Оскільки струми IBP пропорційні ЕРС ЕBP, то і магнітний потік Фq змінюється пропорційно частоті обертання ротора ω: Фq = k2ω. (4.43) Частота пульсації потоку Фq співпадає з частотою напруги обмотки збудження. Магнітний потік Фq наводить в генераторній обмотці вихідну ЕРС ЕВИХ, діюче значення якої визначається рівнянням
де ωΓ.Е — ефективне число витків генераторної обмотки; Фqm – амплітудне значення потоку по поперечній осі. З урахуванням (4.43) вираз (4.44) перетвориться до вигляду
де Кг = 4,44ωГ.Э f k2; α — кут повороту ротора. Частота вихідний ЕРС рівна частоті напруги збудження і не залежить від частоти обертання ротора. Одержаний вираз справедливий при незалежності потоку Фd від частоти обертання ротора. Насправді магнітний потік Фd із зростанням частоти обертання ω зменшується. Це пояснюється тим, що під дією магнітного потоку Фq в елементарних провідниках ротора наводиться додаткова ЕРС обертання ЕВР.Д, напрям якої співпадає з напрямом ЕТР. Оскільки потік Фq зраджується пропорційно частоті обертання, то додаткова ЕРС ЕВР.Д змінюється пропорційно квадрату цієї частоти. Струм в роторі, створений ЕРС ЕВР.Д, викликає зменшення потоку по подовжній осі Фd. Вихідна напруга тахогенератора буде менше вихідний ЕРС EВЫХ на величину падіння напруги на опорі генераторної обмотки ZГ:
де Iг — струм, що виникає в генераторній обмотці при її замиканні на опір навантаження ZH. Струм Iг створює потік Фг, направлений назустріч потоку Фq. З урахуванням вказаних фізичних процесів вихідна характеристика асинхронного тахогенератора має наступний вигляд:
де kт = wГ.Э /wВ.Э — коефіцієнт трансформації обмоток тахогенератора; wВ.Э — ефективне число витків обмотки збудження; ν=ω/ω0 — відносна частота обертання ротора; ω0 — синхронна частота обертання; А і В — комплексні коефіцієнти, залежні від параметрів схеми заміщення тахогенератора до навантаження. Як видно з виразу (4.45), вихідна напруга Uвых не є лінійною функцією частоти обертання ротора і залежить від навантаження (рис. 4.54). Для ідеального тахогенератора, що не має швидкісною амплітудної і фазової погрішностей, рівняння вихідної характеристики можна одержати з (4.45) при В = 0:
Порівняння (4.46) і (4.45) дозволяє визначити амплітудну і фазові погрішності тахогенератора. Для зменшення швидкісних погрішностей вибирають тахогенератори з такою синхронною частотою обертання, при якій значення відносної частоти обертання ротора не перевищує 0,3, оскільки вихідна характеристика на ділянці ν = 0 — 0,3 практично лінійна. Без урахування навантаження
Якщо за вхідну величину прийнята частота обертання ротора, то тахогенератор є безінерційною ланкою з передавальною функцією
Якщо за вихідну величину прийнятий кут повороту ротора, то тахогенератор є ідеальною диференцюючою ланкою з передавальною функцією
У авторульовому асинхронний тахогенератор використовується як диференціююча ланка, вхідною величиною якого є кут відхилення судна від заданого курсу.
|
||||
|
|
Последнее изменение этой страницы: 2016-09-19; просмотров: 796; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.145.85.233 (0.009 с.) |

 Розрізняють прямий і зворотний п'єзоефекти. Прямий п'єзоефект полягає у тому, що під дією механічних напруг на гранях кристала виникають електричні заряди. Зворотний п'єзоефект полягає у тому, що під дією електричного поля відбувається зміна геометричних розмірів кристала. На використовуванні прямого п'єзоефекту засновані перетворювачі зусиль, тиску, прискорень. Зворотний п'єзоефект знайшов застосування в ультразвукових генераторах, вібраторах і т.д.
Розрізняють прямий і зворотний п'єзоефекти. Прямий п'єзоефект полягає у тому, що під дією механічних напруг на гранях кристала виникають електричні заряди. Зворотний п'єзоефект полягає у тому, що під дією електричного поля відбувається зміна геометричних розмірів кристала. На використовуванні прямого п'єзоефекту засновані перетворювачі зусиль, тиску, прискорень. Зворотний п'єзоефект знайшов застосування в ультразвукових генераторах, вібраторах і т.д.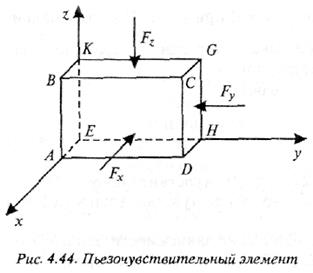 П’єзочутливий елемент (мал. 4.44) вирізується з кристала кварцу і має форму паралелепіпеда, грані якого відповідним чином орієнтовані відносно осей кристала.
П’єзочутливий елемент (мал. 4.44) вирізується з кристала кварцу і має форму паралелепіпеда, грані якого відповідним чином орієнтовані відносно осей кристала.
 (4.31)
(4.31)
 Найбільш ширше в п'єзоелектричних перетворювачах застосовується кварц. П’єзомодуль кварцу kп = 2,3 • 10-2 Кл/Н, діелектрична проникність ε = 40 • 10-2 Ф/м, модуль пружності Е = (7 — 10)10 Па. При зміні температури до 400 °С значення п’єзомодуля практично не міняється. Понад 400 °С спостерігається сильне зменшення п’єзомодуля, і при температурі 573 °С п’єзомодуль к = 0. Кварцові п’єзо- перетворювачі з погляду стабільності і термонезалежності характеристик є найбільш відповідними для датчиків, призначених для роботи в розширеному діапазоні температур при великих значеннях перетворюваних зусиль. Недоліками кварцу є мале значення п’єзомодуля, низька діелектрична проникність і мала власна ємність кварцових пластин, внаслідок чого ємність кабелю і навантаження значно зменшують чутливість перетворювача.
Найбільш ширше в п'єзоелектричних перетворювачах застосовується кварц. П’єзомодуль кварцу kп = 2,3 • 10-2 Кл/Н, діелектрична проникність ε = 40 • 10-2 Ф/м, модуль пружності Е = (7 — 10)10 Па. При зміні температури до 400 °С значення п’єзомодуля практично не міняється. Понад 400 °С спостерігається сильне зменшення п’єзомодуля, і при температурі 573 °С п’єзомодуль к = 0. Кварцові п’єзо- перетворювачі з погляду стабільності і термонезалежності характеристик є найбільш відповідними для датчиків, призначених для роботи в розширеному діапазоні температур при великих значеннях перетворюваних зусиль. Недоліками кварцу є мале значення п’єзомодуля, низька діелектрична проникність і мала власна ємність кварцових пластин, внаслідок чого ємність кабелю і навантаження значно зменшують чутливість перетворювача. (4.35)
(4.35) (4.36)
(4.36)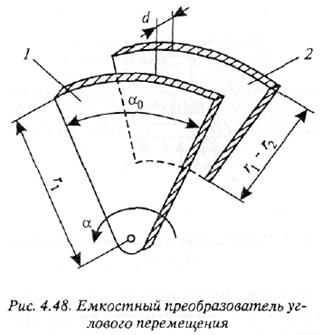 З (4.36) видно, що ємкість перетворювача змінюється по лінійному закону залежно від кута α. Датчики ємкостей застосовуються для вимірювання порівняно великих кутових переміщень. Відповідним вибором форми рухомої 1 і нерухомої 2 обкладок можна одержати задану функціональну залежність між зміною ємкості і кутовим переміщенням.
З (4.36) видно, що ємкість перетворювача змінюється по лінійному закону залежно від кута α. Датчики ємкостей застосовуються для вимірювання порівняно великих кутових переміщень. Відповідним вибором форми рухомої 1 і нерухомої 2 обкладок можна одержати задану функціональну залежність між зміною ємкості і кутовим переміщенням.
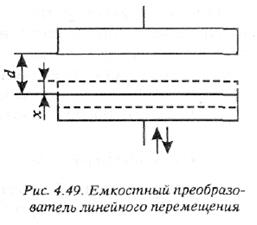 Таким чином, при малих переміщеннях ємкість перетворювача змінюється згідно із законом, близькому до лінійного. Перетворювачі ємкостей із змінною відстанню між обкладками застосовуються для вимірювання малих лінійних переміщень (до 1 мм).
Таким чином, при малих переміщеннях ємкість перетворювача змінюється згідно із законом, близькому до лінійного. Перетворювачі ємкостей із змінною відстанню між обкладками застосовуються для вимірювання малих лінійних переміщень (до 1 мм).
 (4.37)
(4.37)
 (4.38)
(4.38)
 (4.39)
(4.39) де Фр — потік реакції якоря.
де Фр — потік реакції якоря.

 (4.41)
(4.41)
 (4.42)
(4.42)
 — електромагнітна постійна часу ланцюга якоря;
— електромагнітна постійна часу ланцюга якоря; — статичний коефіцієнт посилення по напрузі.
— статичний коефіцієнт посилення по напрузі.

 (4.44)
(4.44)

 (4.45)
(4.45)