Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Вимірювальні перетворювачі і датчикиСодержание книги Поиск на нашем сайте ЧАСТИНА II ВИМІРЮВАЛЬНІ ПЕРЕТВОРЮВАЧІ І ДАТЧИКИ Розділ 4. Вимірювальні перетворювачі Термоперетворювачі опору Принцип дії термоперетворювачів опору заснований на зміні електричного опору провідникових і напівпровідникових матеріалів при зміні їх температури. У термоперетворювачах опору використовуються матеріали, що володіють великим і стабільним температурним коефіцієнтом опору, лінійною залежністю опору від температури, хорошою відтворністю властивостей. Прилади для вимірювання температури, в яких як чутливі елементи використовуються термоперетворювачі опору, називаються термометрами опору. У промислових термометрах опори знайшли застосування провідникові термоперетворювачі опору. Провідникові термоперетворювачі виготовляються з чистих металів: платини, міді, нікелю і заліза. Найбільш ширше застосовуються платина і мідь. Для металів залежність опору від температури має нелінійний характер:
де R0 — опір провідника при початковій температурі; Θ — перегрівши провідника відносно початкової температури; α, β, γ — коефіцієнти, залежні від властивостей провідника. Конкретний вираз для опору термоперетворювача опору залежить від заданого діапазону вимірювання температури. Для платинових термоперетворювачів, працюючих в діапазоні від 0 до 600 ºС, залежність опору від температури визначається виразом
де R0 — опір при 0 ºС. Для чистої платини α = 3,94 • 10-3 1/ºС, β = - 5,8 • 10-7 1/(°С)2. У діапазоні від 0 до -200 ºС залежність опору платинового термоперетворювача від температури має інший вигляд:
де γ = -4 • 10-21/(°С)3. Залежність електричного опору мідного термоперетворювача, працюючого в діапазоні від -50 до 180 °З, від температури має лінійний характер і виражається рівнянням
Вибір матеріалу для термоперетворювачів опору визначається інертністю металу до вимірюваного середовища в заданому інтервалі температур. Мідні термоперетворювачі можна застосовувати до температури 200 ºС в атмосфері, що має низьку вологість і вільній від газів, що викликають корозію. При вищій температурі мідь окислюється. Платинові термоперетворювачі використовуються при вимірюванні температури в діапазоні від -200 до 650 °С. Залізо і нікель як матеріал для термоперетворювачів застосовують рідко, у зв'язку з тим, що характеристики цих металів відрізняються нелінійністю і сильною залежністю від домішок. Вітчизняна промисловість випускає платинові і мідні термометри опору, чутливий елемент яких виконується з тонкого дроту — відповідно платинового (діаметром 0,07 мм) або мідного (діаметром 0,1 мм). Щоб виключити появу індуктивності, дріт чутливого елементу намотується біфілярно. Для захисту від дії вимірюваного середовища чутливі елементи поміщають в спеціальну трубку. На рис. 4.15 показана одна з конструкцій термоперетворювача опору. Платиновий дріт 1 намотаний біфілярно на слюдяний каркас 2, на якому є дрібні зубці. Для ізоляції дріт закривається з обох боків слюдяними пластинами 3. Для покращання умов теплообміну чутливого елементу з середовищем застосовуються пластинки 4 С-образного перерізу з фольги. Пластинки 2, 3 і 4 скріпляються і щільно вставляються всередину кожуха 5. Виведення виконуються з срібної стрічки або дроту і виводяться в клемную коробку 7. За допомогою гайки 6 термометр опору кріпиться до корпусу.
По значенню опору при 0 ºС платинові термометри опору випускаються трьох типів: опором 10, 46 і 100 Ом. Перший тип використовується при вимірюванні температури від 0 до 650 ºС, останні два — при вимірюванні температури від -200 до 500 °С. Мідні термометри опору випускаються з опором 53 і 100 Ом і використовуються для вимірювання температур від ~50 до 180 ºС. Тонкоплівкові платинові термометри опору складаються з керамічної підкладки завтовшки 0,6 мм, на яку напилюють шар платини товщиною близько 2 мкм. За допомогою лазерного променя з шару платини випалюється малюнок у вигляді меандра. До одержаного тонкоплівкового провідника приварюють контактні виведення. Для захисту активного платинового провідника від пошкоджень його покривають керамічним ізоляційним шаром завтовшки 10 мкм. Монолітна конструкція тонкоплівкового термоперетворювача значно підвищує його надійність. Тонкоплівкового ПТС використовуються при вимірюванні температури від 0 до 400 ºС. Через теплову інерцію температура чутливого елементу відрізняється від температури контрольованого середовища, яке міняється в часі. Теплова інерція залежить від умов теплообміну між середовищем і чутливим елементом. Термометр опору можна вважати аперіодичною ланкою першого порядку, постійна часу якого залежить від питомої теплоємності термометра, його маси і коефіцієнта теплопередачі. Постійна часу термоперетворювача опору залежить від умов охолоджування і буде різною для одного і того ж перетворювача, що знаходиться в повітрі і в рідині. Залежно від конструкції постійна часу термометрів опору коливається від 10 с до 7 хвилин. Протікання струму через термоперетворювач опору може привести до зміни його температури. Тому при вимірюваннях струм повинен мати невелике значення. Перспективними є перетворювачі опору, виготовлені з напівпровідникових матеріалів з великим негативним температурним коефіцієнтом або, як їх ще називають, термістори. Зміна опору Rт напівпровідника при зміні температури характеризується залежністю
де А — постійна, залежна від фізичних властивостей напівпровідника, розмірів і форми термістора; В — постійна, залежна від фізичних властивостей напівпровідника; Т — температура термістора, К. Температурний коефіцієнт α напівпровідникового термістора негативний. Він досягає значень від -2,5 до 4% К-1, що в 6 — 10 разів більше температурного коефіцієнта металів, і сильно залежить від температури:
де Θ — перегрів відносно початкової температури; Rт — опір термістора при початковій температурі; Rт (Θ) — опір термістора зі зміненою температурою. На рис. 4.16 показаний Устрій термісторів серії ММТ і КМТ. Термістори типів ММТ-1, КМТ-1 (рис. 4.16, а) є напівпровідниковий стержень 1, покритий емалевою фарбою, з контактними ковпачками 2 і виведеннями 3. Ці типи термісторов можуть бути використані лише в сухих приміщеннях. Термістори типів ММТ-4 і КМТ-4 (рис. 4.16, б) вмонтовані в металевий корпус 6 і герметизується. Вони можуть бути застосовані в умовах будь-якої вологості і будь-якого середовища, агресивного, що не є, по відношенню до корпусу термоопору. Герметизація здійснюється склом і оловом 9. Стержень 5 у термісторі типа ММТ-4 огорнутий металевою фольгою 4. Струмовід 7 виконаний з нікелевого дроту. Ці термістори випускаються на номінальні значення опору від 1 до 200 кОм (при 20 ºС) і можуть бути використані для роботи в діапазоні температур від -100 до 129 ºС. Недоліками термісторів є нелінійність залежності їх опорів від температури і значне відхилення від зразка до зразка як номінального значення опору, нормованого звично при 20 ºС (більш ±30%), так і характеру залежності опору від температур (відхилення значень температурного коефіцієнта досягає ±5% і більш). Лінеаризацію залежності опору від температури вдається одержати в коректованих термоелементах, тобто в пристроях, що є комбінацією термісторів з іншими резисторами. Ширше застосування на судах знайшли позистори. Однією з основних відмінностей від термісторів є знак і значення температурного опору. На відміну від термісторів температурна залежність опору позистора має складний характер.
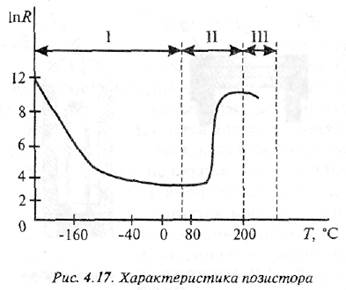
На рис. 4.17 показана температурна залежність позистора. Як видно з рисунка, температурна залежність позистора неоднозначна. Із зростанням температури від -180 ºС опір позистора зменшується, досягаючи мінімального значення при 60—80 °С. Подальше підвищення температури викликає зростання опору, що досягає максимального значення при 190 – 200 ºС. Із зростанням температури понад 190—200 ºС опір зменшується. На характеристиці можна виділити три ділянки. На першій і третій ділянках позистор поводиться як термістор. На другій ділянці позистор має позитивний температурний коефіцієнт опору (ТКО). Звичайно використовується друга ділянка характеристики. На судах позистори використовують для захисту асинхронних електродвигунів від перевантаження.
Індуктивні перетворювачі Устрій і принцип роботи простого індуктивного перетворювача. Індуктивні перетворювачі служать для перетворення кутових і лінійних переміщень в електричний сигнал. На мал. 4.20 показана схема простого індуктивного перетворювача, що складається з магнітного осерді 1 з обмоткою 2 і якорі 3, Між полюсами осерді і якорем є повітряний зазор д. Без урахування потоків розсіяння потокозчеплення W обмотки зраджується пропорційно протікаючому в ній струму i:
де L — індуктивність обмотки; i — миттєве значення струму. Потокозчеплення рівне Ψ = wФ, де w — число витків обмотки; Ф — магнітний потік, створюваний обмоткою. З урахуванням останнього виразу індуктивність обмотки рівна
Магнітний потік обмотки визначається магніторушійною силою F магнітним опором перетворювача RM:
Вираз для потоку справедливий без урахування втрат в сердечнику і якорі перетворювача. Магнітний опір перетворювача визначається магнітним опором повітряного зазора RMB і магнітним опором осерді і якоря, виконаних із сталі, Rм.ст:
де μ0 — магнітна постійна; S — площа поперечного перетину магнітопровода; lСТ — довжина магнітної силової лінії в сердечнику і якорі; μr — відносна магнітна проникність матеріалу магнітопроводу. Оскільки магніторушійна сила рівна F=iw, то для індуктивності обмотки одержимо наступний вираз:
Індуктивний опір обмотки
де ω=2πf, f— частота живлячої мережі.
де R = RH + RП; RH — опір навантаження; RП — активний опір обмотки перетворювача. Діюче значення вихідної напруги перетворювача
де I, U — діючі значення струму перетворювача і напруги живлення. З (4.5) видно, що вихідна напруга при заданих параметрах мережі і незмінних конструктивних параметрах перетворювача залежить від величини повітряного зазору. У більшості конструкцій індуктивних перетворювачів величина повітряного зазору така, що RМВ >> RМ.СТ. Тому опором RМ.СТ можна нехтувати. Крім того, звичний індуктивний опір обмотки значно більше її активного опору і опору навантаження. В цьому випадку для вихідної напруги можна знайти інший вираз:
Відмінність реальної характеристики від лінійної при малих значеннях δ пояснюється тим, що при таких δ магнітний опір магнітопроводу перетворювача стає сумірним з магнітним опором повітряного зазору, тому нехтування величиною RМ.СТ призводить до появи погрішності. Відхилення реальної характеристики від лінійної функції при великих значеннях δ пояснюється іншим допущенням, відповідно до якого активний опір вважається дуже малим в порівнянні з індуктивним опором обмотки. При великих значеннях δ індуктивність значно зменшується, тому індуктивний опір стає сумірним з активним опором, що і викликає відхилення характеристики. Розглянутий індуктивний перетворювач має наступні недоліки: 1) фаза вихідної напруги залежить від величини повітряного зазору; 2) на якір постійно діє електромагнітна сила, що прагне притягти його до полюсів осерді. Через вказані недоліки розглянуті індуктивні перетворювачі застосовуються рідко.
Реверсивні індуктивні перетворювачі. Реверсивні індуктивні перетворювачі набули найширше поширення. Існують дві основні схеми включення реверсивних індуктивних перетворювачів: диференціальна і мостова. Диференціальна схема включення показана на рис. 4.22, а. Реверсивний індуктивний перетворювач складається з двох простих. Магнітна система має два однакові осердя I і I I і спільний якір I I I. Обмотки осердь містять однакове число витків. Опір навантаження включається між середньою точкою вторинної обмотки трансформатора TV і середньою точкою обмоток осердя. При такому включенні струм навантаження рівний різниці струмів верхньої і нижньої половин схеми:
При активному навантаженні ZН = RH вихідна напруга рівна
У нейтральному положенні якоря (х = 0) зазори між полюсами осердя і якорем однакові: δ1 = δ2 = δ0 Індуктивності обмоток також рівні: L1 = L2, тому струми I1 і I2 рівні по модулю, а струм навантаження I = 0. Отже, і вихідна напруга перетворювача рівна нулю. Таким чином, при вхідному сигналі, рівному нулю, вихідний сигнал також рівний нулю. Переміщення якоря вгору приведе до зменшення верхнього повітряного зазору і збільшення нижнього:
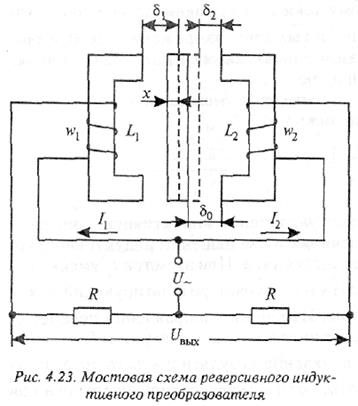
де х — переміщення якоря. Зміна зазорів спричинить збільшення індуктивного опору обмотки верхнього осердя і зменшення індуктивного опору обмотки нижнього осердя. При цьому струм I1 зменшиться, а струм I2 зросте. У навантаженні потече результуючий струм і з'явиться вихідна напруга. Зміна напряму переміщення якоря від нейтрального положення приведе до зростання струму I1 і зменшення струму I2, що спричинить появу результуючого струму, фаза якого на 180º відрізнятиметься від фази результуючого струму при первинному напрямі переміщення. Залежність напруг U1 і U2 від переміщення можна одержати, скориставшись кривою на рис0. 4.21. При побудові кривих слід врахувати, що δ1 змінюється від 0 до 2δ0 при зміні х від хmax до –xmax, а δ2 змінюється від 0 до 2δ0 при зміні х від –хmax до хmax. На рис. 4.22, б показані криві U1 =f(x), U2 =f(x) і крива вихідної напруги, побудована відповідно до виразу (4.6). Характеристика UВЫХ = f(x) проходить через початок координат. Зміна знаку UВЫХ при зміні знаку х умовно позначає зміну фази вихідної напруги перетворювача на 180°. У мостовій схемі реверсивного індуктивного перетворювача (рис. 4.23) обмотки осердь включаються в суміжні плечі моста. Вихідна напруга знімається з однією з діагоналей моста. Воно рівне різниці напруг:
де Вираз (4.7) можна представити у вигляді
Реверсивні індуктивні перетворювачі в порівнянні з нереверсивними мають наступні переваги: 1) лінійна частина вихідної характеристики має велику протяжність; 2) електромагнітне зусилля, діюче на якір, значно менше зусилля в нереверсивному перетворювачі. Це пояснюється частковою компенсацією електромагнітних зусиль, діючих із сторони осердь I і II. Повна компенсація відбувається в нейтральному положенні якоря. Розглянуті реверсивні індуктивні перетворювачі дозволяють вимірювати переміщення від декількох мікрон до десятих часток міліметра. Нижня межа обумовлена технологічними труднощами створення малих повітряних зазорів. Верхня межа пояснюється значним зменшенням чутливості при великих повітряних зазорах через появу потоків розсіяння. Для вимірювання великих переміщень застосовуються циліндрові реверсивні індуктивні перетворювачі. На рис. 4.24 показаний реверсивний індуктивний перетворювач, у якого робочий діапазон вимірюваних переміщень досягає декількох міліметрів. Магнітопровід перетворювача 2 виконується у вигляді циліндрової трубки, яка разом з двома кришками 4 виконує роль ярма. Якір 3 також має циліндрову форму. Диск 1 з феромагнітного матеріалу призначений для збільшення магнітної провідності між трубкою і якорем. По обидві сторони від диска встановлюються дві циліндрові котушки 5. Як правило, перетворювач має дві однакові котушки. Принцип дії перетворювача аналогічний принципу дії реверсивного індуктивного перетворювача, розглянутого вище.
Через електричну і магнітну асиметрію нейтральне геометричне розташування якоря (х = 0) не відповідає дійсному нейтральному положенню. Реверсивні перетворювачі мають залишкову напругу, яка містить синфазну і квадратурну складові, а також вищі гармоніки. Синфазну складову можна звести до нуля переміщенням якоря в ту або іншу сторону. Квадратурна і вищі гармонійні складові переміщенням якоря не компенсуються. Тому при будь-якому положенні якоря вихідна напруга перетворювача не рівна нулю. Початок відліку визначають при мінімальному значенні UВЫХ. Індуктивні перетворювачі знайшли застосування в датчиках рівня, тиску, стабілізаторах качання, системах кренування, системах контролю за збереженням поршневих кілець дизелів, датчиках переміщення рейки паливних насосів дизеля.
Ємкісні перетворювачі Принцип дії перетворювачів ємкостей заснований на залежності ємкості конденсатора від його геометричних розмірів, форми, відстані між його обкладаннями і від діелектричної проникності середовища. У перетворювачах ємкостей звичайно використовуються плоскопаралельні або циліндрові конденсатори. Живлення здійснюється від мережі змінного струму. Ємкість плоскопаралельного конденсатора визначається виразом
де ε0 — електрична постійна, рівна 8,85 • 10-12 Ф/м; εr — відносна діелектрична проникність середовища; S — площа обкладань; d — відстань між обкладаннями. Як видно з (4.35), ємкість перетворювача залежить від S, d, εr. Кожна з цих величин може бути вхідною величиною перетворювача. При зміні площі взаємного перекриття пластин ємкість змінюється по лінійному закону. Ємкісні перетворювачі із змінною площею перекриття використовуються як датчики кутових переміщень (мал. 4.48). В цьому випадку ємкість перетворювача рівна
де r1 і r2 — зовнішній і внутрішній радіуси обкладань; α0 — початковий кут перекриття.
Із зміною відстані d між обкладками (рис. 4.49) ємкість конденсатора змінюється по гіперболічному закону:
При малих переміщеннях x << d можна нехтувати величиною (x/d)2, тоді
де
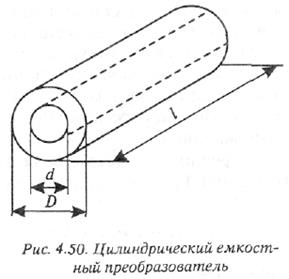
Ємкісні перетворювачі, ємкість яких змінюється залежно від діелектричної проникності середовища, використовуються як датчики рівня, вологості, складу речовини і товщини діелектричних матеріалів. Ємкість циліндрового перетворювача (рис. 4.50)
де l,d,D — геометричні розміри перетворювача.
Циліндрові перетворювачі застосовуються на судах як датчики рівня рідини. По конструктивних міркуваннях ємкість більшості перетворювачів складає 10 — 200 пФ. На низьких частотах опір перетворювачів ємкостей досягає декількох мегом і стає сумірним з опором ізоляції. Для зменшення опору перетворювачі ємкостей живлять від високочастотного джерела змінного струму (від одиниць кілогерц до десятків мегагерц). Навіть на високих частотах вихідний опір перетворювачів ємкостей великий і вихідна потужність мала, тому перетворювачі працюють з підсилювачами. Щоб зменшити вплив наведень, перетворювач підключають до підсилювача екранованим кабелем. Ємкість кабельної лінії негативно позначається на роботі перетворювача, знижуючи його чутливість і точність. Для зменшення впливу кабельної лінії схему перетворення вихідного сигналу перетворювача ємкості розташовують в безпосередній близькості від нього. Коливання температури і вологості навколишнього середовища також роблять шкідливий вплив на роботу перетворювача ємкості, призводячи до змін d і εr. Для зменшення температурної погрішності обкладання перетворювачі виконують із сплавів з малим температурним коефіцієнтом лінійного розширення. Для усунення впливу вологості застосовують герметизацію перетворювачів ємкостей. Перетворювачі ємкостей мають малу масу і габарити, володіють високою чутливістю. До недоліків перетворювачів ємкостей слід віднести необхідність посилення вихідного сигналу і захисту від впливу паразитних ємкостей, застосування високочастотного джерела живлення. Перетворювачі ємкостей практично безінерційні. Тахогенератори Загальні відомості. Тахогенераторами називаються електричні машини, що служать для перетворення механічного переміщення валу в електричний сигнал — вихідну напругу. Закон перетворення механічної величини в електричну визначається статичною характеристикою тахогенератора. Рівняння статичної характеристики ідеального тахогенератора має наступний вигляд:
де ω — кутова швидкість валу; α — кут повороту валу. По роду струму тахогенератори підрозділяються на тахогенератори постійного і змінного струму. До тахогенераторів пред'являються наступні основні вимоги: 1) лінійність вихідної характеристики; 2) велика крутизна вихідної характеристики; 3) мала амплітудна погрішність; 4) мала фазова погрішність (для тахогенераторів змінного струму); 5) мінімальна пульсація вихідної напруги (для тахогенераторів постійного струму); 6) малий момент інерції ротора і мала електромагнітна постійна часу; 7) стабільність вихідної характеристики; 8) малі маса і габарити. У суднових системах контролю і регулювання тахогенератори застосовуються для вимірювання частоти обертання гребних валів, головних і допоміжних силових двигунів, а також для здійснення зворотного зв'язку по частоті обертання і для введення сигналу по похідній від кута повороту в автоматичних системах регулювання. Тахогенератори постійного струму. Тахогенератори постійного струму є генераторами постійного струму невеликої потужності з електромагнітним (рис. 4.51) або магнітоелектричним збудженням. У режимі холостого ходу при постійному магнітному потоці збудження Фв вихідна напруга тахогенератора рівна ЕРС:
де к = сФв. Статична характеристика 1, відповідна режиму холостого ходу (Rн = ∞), показана на рис. 4.52. При підключенні навантаження напруга зменшується на величину падіння напруги в ланцюзі якоря:
де Iя = Uвых/RH; RH – опір навантаження; R – опір ланцюга якоря, рівний сумі опорів обмотки якоря Rя і переходу щітки — колектор Rщ, З урахуванням (4.38) одержимо рівняння для вихідної напруги
Із рівняння (4.39) видно, що вихідна напруга змінюється по лінійному закону у функції частоти обертання ω. Нахил вихідної характеристики залежить від опору навантаження (порівняти криві 2, 3 на рис. 4.52). Зменшення опору навантаження (Rн2 < Rн1) призводить до зменшення крутизни вихідної характеристики. Рівняння (4.39) одержане без урахування впливу реакції якоря і постійної величини падіння напруги на переході щітки — колектор. З урахуванням реакції якоря результуючий магнітний потік Ф = Фв - Фр,
Потік реакції якоря змінюється пропорційно струму Iя, тому
ЕРС тахогенератора при навантаженні визначається виразом
Для графітних щіток постійним слід рахувати не опір переходу щітки — колектор R, а падіння напруги U на ньому. Вихідна напруга тахогенератора при навантаженні визначається рівнянням
Перетворюючи рівняння (4.41) з урахуванням (4.40), одержимо
З одержаного виразу видно, що статична характеристика є нелінійною і має зону нечутливості від ω = 0 до ωЗ.Н (див. рис. 4.52). Нелінійність вихідної характеристики 4 пояснюється впливом реакції якоря. Відхилення вихідної характеристики від лінійного закону збільшується із зростанням кутової швидкості з і зменшенням опору навантаження. Для зменшення нелінійності вихідної характеристики слід використовувати невеликий діапазон частоти обертання і навантажувати тахогенератор великим опором. Зона нечутливості з'являється за рахунок падіння напруг на переході щітки — колектор. У зоні нечутливості ЕРС тахогенератора менше падіння напруги на переході щітки — колектор (kω < Uщ), тому вихідна напруга рівна нулю. Для зменшення зони нечутливості в тахогенераторах встановлюють мідно-графітні або срібно-графітні щітки. У тахогенераторах з електромагнітним збудженням зміна "температури навколишнього середовища призводить до зміни опору обмотки збудження і, отже, струму збудження. Для зменшення температурної погрішності магнітну систему тахогенератора роблять насиченою і робочу крапку вибирають за коліном кривої намагнічування. В цьому випадку зміна струму збудження майже не впливає на значення магнітного потоку тахогенератора. У перехідному режимі рівняння для ланцюга якоря тахогенератора без урахування реакції якоря і падіння напруги на переході щітки — колектор має вигляд
де е — миттєве значення ЕРС; uВЫХ — миттєве значення вихідної напруги; LЯ — індуктивність обмотки якоря; iЯ — миттєве значення струму якоря. Перетворюючи рівняння (4.42) з урахуванням (4.38) і рівність iЯ = uвых/Rн, одержимо
Введемо позначення:
З урахуванням цих позначень запишемо
або
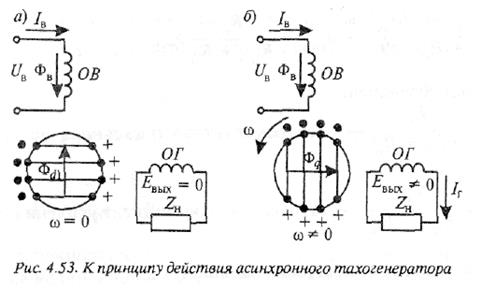
З рівнянь видно, що якщо вхідною величиною є кутова швидкість якоря, то тахогенератор є аперіодичною ланкою першого порядку, якщо ж вхідною величиною є кут повороту, то тахогенератор є реальною диференцюючою ланкою. Основні переваги тахогенератора постійного струму полягають у відсутності фазових погрішностей і високої чутливості. До недоліків тахогенератора відносяться наявність щіток і колектора, які приводять до зниження надійності, а також пульсації вихідної напруги і радіоперешкоди. Асинхронний тахогенератор. Конструкція асинхронного тахогенератора не відрізняється від конструкції двофазного асинхронного виконавчого двигуна з порожнистим ротором. Порожнистий ротор тахогенератора виконується з високоомних матеріалів (константану, манганіну і ін.), опір яких мало змінюється під впливом температури. На статорі є дві обмотки, здвинуті в просторі на 90° (рис. 4.53). На обмотку збудження ОЗ подається напруга UB від мережі змінного струму. З генераторної обмотки ОГ знімається вихідний сигнал. Обмотка збудження створює пульсуючий магнітний потік Фв, направлений по подовжній осі машини. При нерухомому роторі магнітний потік ФB наводитиме трансформаторну ЕРС ЕТР в порожнистому роторі як у вторинній обмотці трансформатора. Порожнистий ротор можна вважати таким, що складається з елементарних провідників, замкнутих накоротко на торцях. Контури струмів, обумовлених трансформаторною ЕДС, розташовуються в площинах, перпендикулярних подовжній осі машини (рис. 4.53, а). Ці струми створюють магнітний потік Фd1, направлений, згідно правилу Лінь, назустріч магнітному потоку Фв. Теоретично в результаті взаємодії магнітних потоків при нерухомому роторі (ω = 0) у тахогенераторі створюється магнітний потік Фd, направлений по подовжній осі, тому в генераторній обмотці, розташованій по поперечній осі, ЕРС наводитися не буде (Евыx = 0). Проте через несиметрію магнітного ланцюгу, несиметрію порожнистого ротор, а також неточність зрушення обмоток в просторі на виході тахогенератора є невелика напруга, звана залишковою.
При обертанні ротора (ω ≠ 0) в його елементарних провідниках наводиться ЕРС обертання ЕBP, рівна
де k1 — коефіцієнт, залежний від конструктивних параметрів тахогенератора. Під дією ЕРС обертання по ротору протікають струми I, контури яких при великому активному опорі ротора розташовуються в площинах, паралельних подовжній осі (рис. 4.53, б). Ці струми створюють магнітний потік Фq, направлений по поперечній осі. Оскільки струми IBP пропорційні ЕРС ЕBP, то і магнітний потік Фq змінюється пропорційно частоті обертання ротора ω: Фq = k2ω. (4.43) Частота пульсації потоку Фq співпадає з частотою напруги обмотки збудження. Магнітний потік Фq наводить в генераторній обмотці вихідну ЕРС ЕВИХ, діюче значення якої визначається рівнянням
де ωΓ.Е — ефективне число витків генераторної обмотки; Фqm – амплітудне значення потоку по поперечній осі. З урахуванням (4.43) вираз (4.44) перетвориться до вигляду
де Кг = 4,44ωГ.Э f k2; α — кут повороту ротора. Частота вихідний ЕРС рівна частоті напруги збудження і не залежить від частоти обертання ротора. Одержаний вираз справедливий при незалежності потоку Фd від частоти обертання ротора. Насправді магнітний потік Фd із зростанням частоти обертання ω зменшується. Це пояснюється тим, що під дією магнітного потоку Фq в елементарних провідниках ротора наводиться додаткова ЕРС обертання ЕВР.Д, напрям якої співпадає з напрямом ЕТР. Оскільки потік Фq зраджується пропорційно частоті обертання, то додаткова ЕРС ЕВР.Д змінюється пропорційно квадрату цієї частоти. Струм в роторі, створений ЕРС ЕВР.Д, викликає зменшення потоку по подовжній осі Фd. Вихідна напруга тахогенератора буде менше вихідний ЕРС EВЫХ на величину падіння напруги на опорі генераторної обмотки ZГ:
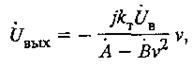
де Iг — струм, що виникає в генераторній обмотці при її замиканні на опір навантаження ZH. Струм Iг створює потік Фг, направлений назустріч потоку Фq. З урахуванням вказаних фізичних процесів вихідна характеристика асинхронного тахогенератора має наступний вигляд:
де kт = wГ.Э /wВ.Э — коефіцієнт трансформації обмоток тахогенератора; wВ.Э — ефективне число витків обмотки збудження; ν=ω/ω0 — відносна частота обертання ротора; ω0 — синхронна частота обертання; А і В — комплексні коефіцієнти, залежні від параметрів схеми заміщення тахогенератора до навантаження. Як видно з виразу (4.45), вихідна напруга Uвых не є лінійною функцією частоти обертання ротора і залежить від навантаження (рис. 4.54). Для ідеального тахогенератора, що не має швидкісною амплітудної і фазової погрішностей, рівняння вихідної характеристики можна одержати з (4.45) при В = 0:
Порівняння (4.46) і (4.45) дозволяє визначити амплітудну і фазові погрішності тахогенератора. Для зменшення швидкісних погрішностей вибирають тахогенератори з такою синхронною частотою обертання, при якій значення відносної частоти обертання ротора не перевищує 0,3, оскільки вихідна характеристика на ділянці ν = 0 — 0,3 практично лінійна. Без урахування навантаження
Якщо за вхідну величину прийнята частота обертання ротора, то тахогенератор є безінерційною ланкою з передавальною функцією
Якщо за вихідну величину прийнятий кут повороту ротора, то тахогенератор є ідеальною диференцюючою ланкою з передавальною функцією
У авторульовому асинхронний тахогенератор використовується як диференціююча ланка, вхідною величиною якого є кут відхилення судна від заданого курсу.
ЧАСТИНА II ВИМІРЮВАЛЬНІ ПЕРЕТВОРЮВАЧІ І ДАТЧИКИ
|
||
|
|
Последнее изменение этой страницы: 2016-09-19; просмотров: 1309; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.119 (0.035 с.) |





 де
де

 Виражаючи опір термістора як функцію перегріву відносно початкової температури, можна виразити його і так:
Виражаючи опір термістора як функцію перегріву відносно початкової температури, можна виразити його і так:


 Опір електричного ланцюга перетворювача
Опір електричного ланцюга перетворювача
 (4.5)
(4.5)
 У одержаному виразі змінною величиною є δ. Графік даної залежності UВЫХ = f(δ) є прямою, що проходить через початок координат (рис. 4.21, штрихова лінія). Реальна характеристика, приведена на рис. 4.21, побудована на підставі виразу (4.5).
У одержаному виразі змінною величиною є δ. Графік даної залежності UВЫХ = f(δ) є прямою, що проходить через початок координат (рис. 4.21, штрихова лінія). Реальна характеристика, приведена на рис. 4.21, побудована на підставі виразу (4.5).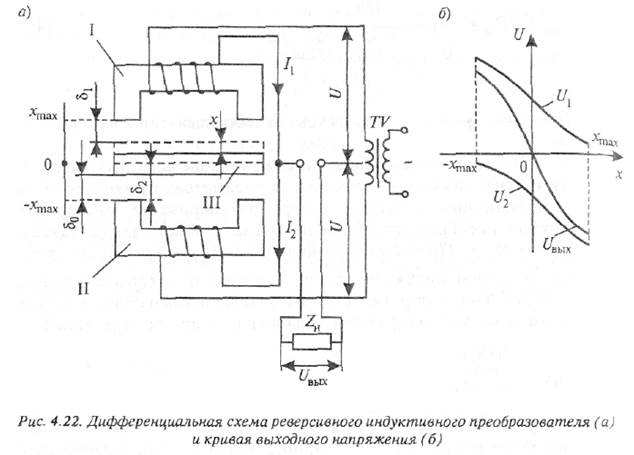
 (4.6)
(4.6)
 (4.7)
(4.7)
 Одержаний вираз співпадає з (4.6). У мостовій схемі переміщення якоря також призводить до зміни струмів і появи вихідної напруги. Зміна напряму переміщення якоря викликає зміну фази вихідної напруги на 180°.
Одержаний вираз співпадає з (4.6). У мостовій схемі переміщення якоря також призводить до зміни струмів і появи вихідної напруги. Зміна напряму переміщення якоря викликає зміну фази вихідної напруги на 180°.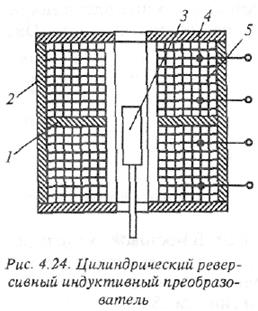 Включення циліндрових реверсивних індуктивних перетворювачів може вироблятися як по диференціальній, так і по мостовій схемам. Основним недоліком розглянутих індуктивних перетворювачів є наявність гальванічного зв'язку вихідного ланцюга з ланцюгом живлення, що ускладнює включення декількох перетворювачів для виконання рахунково-вирішальних операцій без застосування яких-небудь проміжних елементів.
Включення циліндрових реверсивних індуктивних перетворювачів може вироблятися як по диференціальній, так і по мостовій схемам. Основним недоліком розглянутих індуктивних перетворювачів є наявність гальванічного зв'язку вихідного ланцюга з ланцюгом живлення, що ускладнює включення декількох перетворювачів для виконання рахунково-вирішальних операцій без застосування яких-небудь проміжних елементів.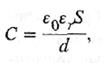 (4.35)
(4.35)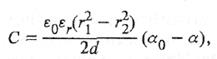 (4.36)
(4.36)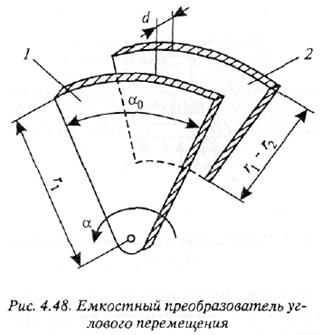 З (4.36) видно, що ємкість перетворювача змінюється по лінійному закону залежно від кута α. Датчики ємкостей застосовуються для вимірювання порівняно великих кутових переміщень. Відповідним вибором форми рухомої 1 і нерухомої 2 обкладок можна одержати задану функціональну залежність між зміною ємкості і кутовим переміщенням.
З (4.36) видно, що ємкість перетворювача змінюється по лінійному закону залежно від кута α. Датчики ємкостей застосовуються для вимірювання порівняно великих кутових переміщень. Відповідним вибором форми рухомої 1 і нерухомої 2 обкладок можна одержати задану функціональну залежність між зміною ємкості і кутовим переміщенням.
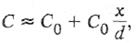
 Таким чином, при малих переміщеннях ємкість перетворювача змінюється згідно із законом, близькому до лінійного. Перетворювачі ємкостей із змінною відстанню між обкладками застосовуються для вимірювання малих лінійних переміщень (до 1 мм).
Таким чином, при малих переміщеннях ємкість перетворювача змінюється згідно із законом, близькому до лінійного. Перетворювачі ємкостей із змінною відстанню між обкладками застосовуються для вимірювання малих лінійних переміщень (до 1 мм).
 (4.37)
(4.37)
 (4.38)
(4.38)
 (4.39)
(4.39) де Фр — потік реакції якоря.
де Фр — потік реакції якоря.

 (4.41)
(4.41)
 (4.42)
(4.42)
 — електромагнітна постійна часу ланцюга якоря;
— електромагнітна постійна часу ланцюга якоря; — статичний коефіцієнт посилення по напрузі.
— статичний коефіцієнт посилення по напрузі.

 (4.44)
(4.44)

 (4.45)
(4.45)