Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Асинхронные машины МДС высших гармоник.Содержание книги Поиск на нашем сайте
Асинхронные машины МДС высших гармоник. Кривая распределения МДС в зазоре асинхронной машины отлична от синусоиды. Для анализа процессов ее раскладывают в гармонический ряд и ограничиваются первой гармоникой. Однако высшие гармоники не исчезают, они имеют место и влияют на характер процессов и на рабочие характеристики АД. Рассмотрим влияние высших гармоник. Для 1-й гармоники получаем бегущее магнитное поле
Для 3-й гармоники Для пятой гармоники:
Для седьмой гармоники:
Рассмотрим скорости движения высших гармоник:
Т. о высшие гармоники вращаются со скоростями меньшими, чем скорость первой гармоники, т.к. при одинаковой частоте питания f,они имеют меньшие полюсные деления. Подробный анализ высших пространственных гармоник позволяет установить следующее: 1) Все высшие гармоники порядок которых кратен 3, т.е. 3,6,9,12,15 отсутствуют. 2) Все высшие пространственные гармоники, порядок которых 6к-1, т.е. 5,11,17…вращаются в сторону противоположную основной гармоники. 3) Все высшие пространственные гармоники, порядок которых 6к+1, т.е. 7,13,19…вращаются в сторону основной гармоники. 4)
Для гармоник с порядком ν
Этот вывод является тривиальным, т.к. в зазоре существует единое магнитное поле, а разложение в гармонический ряд является искусственным приемом. Намагничивающая сила катушечной группы. Обмотка фазы машины переменного тока состоит из нескольких (2,3,4) катушек, которые размещены в пазах по окружности статора. Поэтому такие катушки смещены в пространстве на угол, зависящие от числа пазов и числа q- катушек в катушечной группе
Построение результирующей МДС лучше вести в векторной форме.
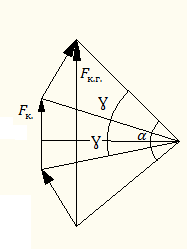
Для нахождения результирующей МДС катушечной группы просуммируем последовательно три вектора. Видно, что геометрическая сумма 3-х МДС меньше арифметической суммы. МДС катушечной группы к сумме МДС 3-х катушек называется коэффициентом распределения:
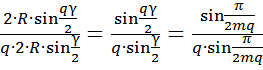
Для нахождения коэффициента рассмотрим рисунок. Обозначим Тогда
Если увеличивать q, то Кр уменьшается. Итак, если известна величина Кр, то
Высшие гармонические ЭДС обмотки переменного тока. Рассмотренный случай справедлив для синусоидального распределения магнитного поля. В действительности поле отлично от синусоиды и в кривой ЭДС будут присутствовать высшие гармоники Если q=2
При укорочении:
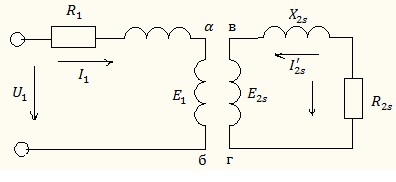
Частота, ЭДС и ток вращающегося ротора.
- скорость вращения м.п; n- скорость вращения ротора. Можно считать, что магнитное поле статора вращается относительно ротора с частотой n2=n0-n. При этом вращающееся поле наводит ЭДС с частотой:
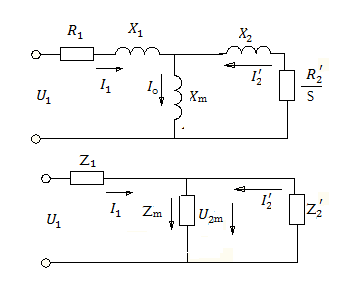
По схеме:
R2S=R2 пренебрегая поверхностным эфф. ом
Приведение параметров обмотки ротора к обмотке статора. Число витков обмотки ротора А) Приведение ЭДС
Б) Приведение токов. При этом исходят из того, что мощность обмотки ротора равна приведенной мощности.
В) Приведение сопротивлений. Исходят из того что потери приведенного ротора равны потерям реального
Уравнения токов А.М. В рабочем режиме ток протекает по обеим обмоткам. При этом магнитное поле машины совместным действием обмотки статора и ротора.
Ток протекая по обмотке ротора создает свое магнитное поле, которое вращается относительно ротора с частотой:
Сам ротор вращается со скоростью n. Тогда магнитное поле ротора вращается относительно статора со скоростью:
Магнитные поля статора и ротора вращаются с одинаковой скоростью, поэтому их можно суммировать, т. к. неподвижны друг относительно друга. Вращающуюся АМ можно рассматривать как трансформатор.
I0 – намагничивающий ток затрачиваемый на создание магнитного потока.
Магнитное сопротивление АМ – сопротивление воздушного зазора, поэтому для проведения магнитного потока требуется создавать значительную МДС.
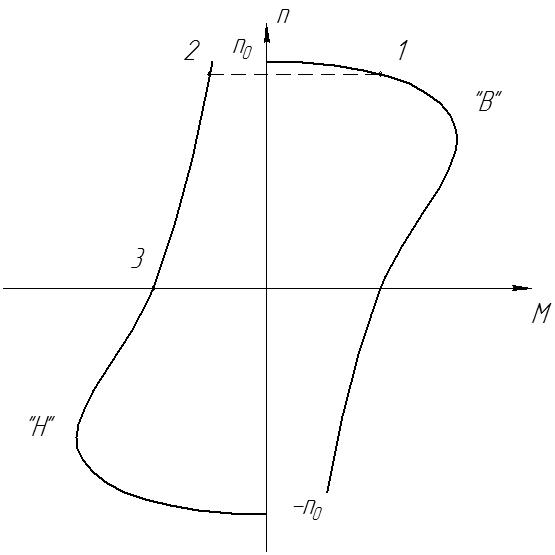
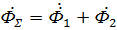
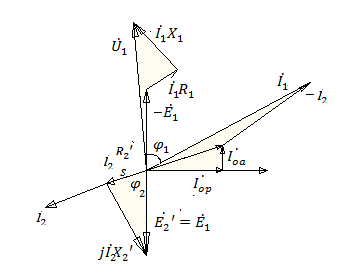
Векторная диаграмма АМ. Она всегда строится в соответствии с системой уравнений: А) Режим двигателя:
В режиме двигателя Рэм потребляется из сети и преобразуется в механическую энергию.
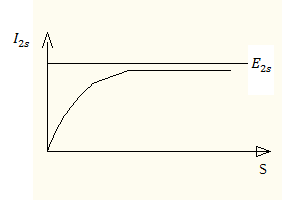
Б) Режим генератора. s<0; n>n0 При отрицательном скольжении E2s=E2
В генераторном режиме активная составляющая меняет знак (так как s< 0). Если в режиме двигателя она потребляется из сети, то в режиме генератора она отдается в сеть.
В генераторном режиме реактивная составляющая не меняет знака. Для создания магнитного потока из сети должен потребляться реактивный намагничивающий ток. Это свойство потреблять реактивный ток является крупным недостатком А.Г. Для того, чтобы обеспечить работу А.Г. необходимо включать синхронные генераторы, которые обеспечивали бы ток возбуждения А.Г.
В тех случаях, когда требуется автономные источники электрической энергии находят применение А.Г. с самовозбуждением. Такой генератор представляет из себя асинхронную к.з. машину, а к зажимам статорной обмотки включают батарею конденсаторов.
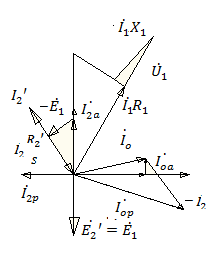
Этот ток создает свое магнитное поле, которое практически совпадает по фазе с остаточным, то есть усиливает его. Возникает лавинообразный процесс. При больших потоках происходит насыщение стали и Ф перестает изменятся => E=const.
А.Г. имеют большие тормозные моменты, поэтому они иногда используются в качестве тормозов. В) Режим электромагнитного тормоза S>1; n<0. В этом режиме в роторе наводится значительная ЭДС, а индуктивное сопротивление намагниченного превышает активное и фазовый сдвиг составляет
В двигателях с фазным роторам в этом режиме в цепь ротора включается дополнительное сопротивление большой величины. В этом случае тепловая энергия в основном выделяется в дополнительном сопротивлении, а к обмоткам прикладывается небольшая мощность.
Электромагнитный момент АД.
Момент асинхронной машины также как и момент МПТ оказался
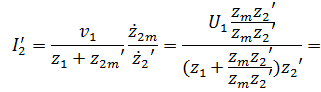
 . Для нахождения тока ротора воспользуемся схемой замещения. . Для нахождения тока ротора воспользуемся схемой замещения.
В этом выражении электромагнитный момент зависит от напряжения питания и параметров обмоток. Момент зависит: от квадрата напряжения – это недостаток; От сопротивления обмоток – чем больше сопротивление, тем меньше Мэм.
s=0 M=0 Найдем max Mэм
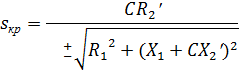
Максимальному моменту соответствует скольжение, которое называется критическим Sкр имеет одинаковую величину как для режима двигателя так и для генератора:
- перегрузочная способность двигателя Если изменять скольжение от -
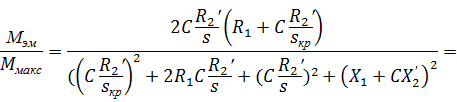
Формула Клосса.
Формула позволяет рассчитать зависимость момента от скольжения по следующим номинальным данным: Рн, nH, λH
Для машин средней мощности можно считать Решая квадратичное уравнение относительно sкр находят sпр=0,2-0,4. Определив Sкр и задаваясь скольжением в определенных пределах используя формулу Клосса рассчитывают соответствующее значение э/м момента.
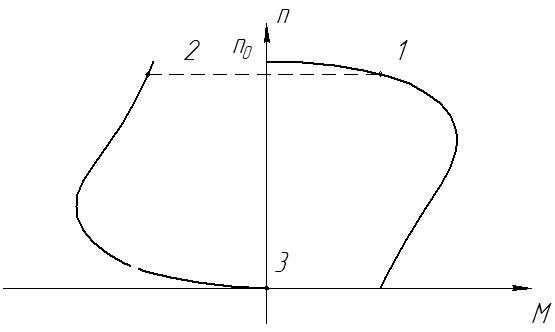
Рабочие характеристики АД Свойства АД принято отображать в виде зависимостей n, M, I1,

В режиме холостого хода активная мощность определяется только потерями в машине, реактивная составляющая, потребляемая для создания магнитного потока велика, поэтому Анализируя характеристики, можно прийти к выводу, что АД должен работать в режиме близком к номинальному и из режимов работы должны быть исключены режимы близкие к холостому ходу. Рассеяние лобовых частей Магнитное поле в зоне лобовых частей имеет сложную пространственную структуру и для нахождения магнитного поля приходится решать 3-х мерную задачу, поэтому чаще всего для расчетов используют полуэмпирические выражения
у – шаг обмотки.
Диффузионное рассеяние При проходе высших гармоник через воздушный зазор их амплитуда уменьшается, а самые высшие через него не проходят, таким образом, эти гармоники создаются, а с обмоткой ротора не сцепляются, поэтому поля от высших гармоник относят к полям рассеяния. Для количественной оценки диффузионного рассеяния обычно используют коэффициент диффузного рассеяния

Пуск АД Его принято характеризировать следующими параметрами:
1) двигатель с фазным ротором. Для пуска двигателя с фазным ротором обычно используют пуск при помощи сопротивлений, которые включаются в роторную цепь, при этом уменьшается пусковой ток и одновременно возрастает пусковой момент. Возрастание момента при уменьшении тока ротора объясняется тем, что при включении добавочных сопротивлений в цепь ротора повышается Для успешного запуска двигателя необходимо включать в цепь ротора добавочное сопротивление такой величины, чтобы МП имел максимально возможную величину. Пусковому моменту соответствует скольжение S=1, а максимальному Sкр, поэтому если Sкр=1, то МП=Ммах
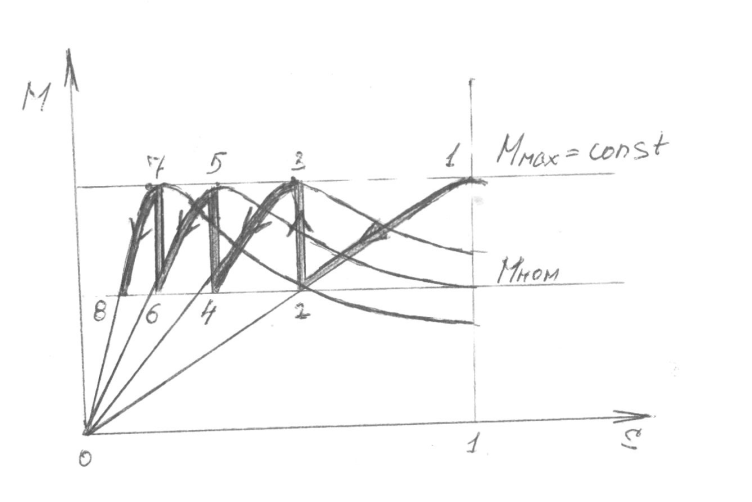
Для дальнейшего разгона первая ступень закорачивается и т. д. Недостатком этого способа являются броски тока в цепи ротора и момента, в результате конструкция двигателя подвергается динамическим усилиям. В тех случаях, когда рабочий механизм обладает большими инерционными массами, тогда увеличивают число ступеней. В случаях, когда броски тока вообще не допускаются применяют схему с индуктивностью.

2)Двигатель с короткозамкнутым ротором а)прямое включение двигателя на напряжение сети. Этот способ сопровождается большими значениями пусковых токов б)Реакторный пуск. Реактор – катушка индуктивности, рассчитанная на величину пускового тока
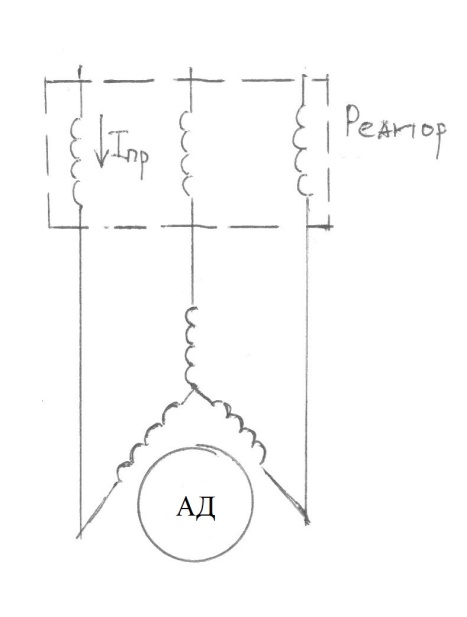
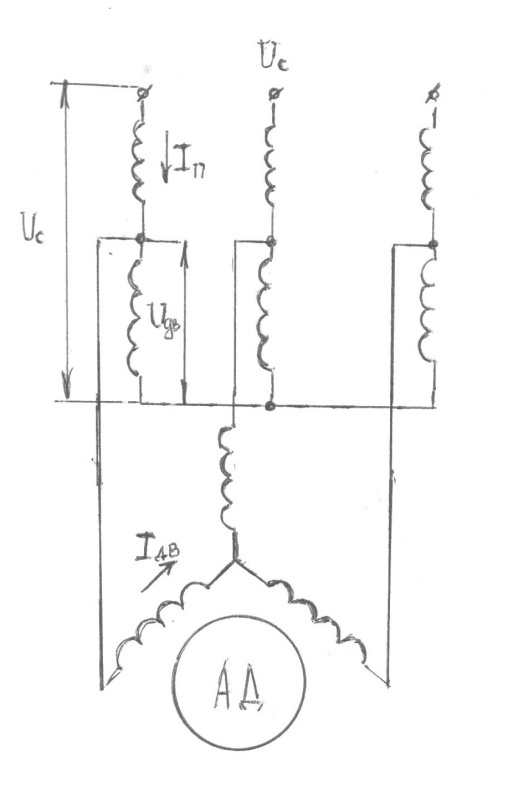
Реактор выполняется проводом большого сечения и имеет малое активное сопротивление. Наоборот индуктивное сопротивление имеет значительную величину. При протекании пускового тока, часть напряжения падает на сопротивлении реактора, поэтому к двигателю подводится пониженное напряжение
Поскольку момент двигателя пропорционален в)Автотрансформаторный. К двигателю подводится пониженное напряжение от автотрансформатора, в результате этого снижается пусковой ток.
Для трансформатора характерно:
г)Переключение обмотки со «звезды» на «треугольник». Для запуска двигателей в момент пуска обмотка включается по схеме «звезда». В результате к фазной обмотке подводится фазное напряжение, которое в Двигатель с глубоким пазом Ротор таких двигателей имеет специальную конструкцию Потоки пазового рассеяния замыкаются как по проводнику, так и по ферромагнитному массиву. В результате нижняя часть паза оказывается хваченной большим числом магнитных силовых линий. Это эквивалентно тому, что потокосцепление нижней части паза больше, чем верхней. Следовательно, индуктивность нижней части паза больше верхней. В момент пуска S=1 и f2=fсети, поэтому распределение тока по высоте стержня определяется индуктивным сопротивлением. Из-за того, что индуктивное сопротивление в нижней части больше верхней, ток протекает в основном в верхней части паза.

Частотное регулирование АД
При изменении частоты сети, изменяется
Если Если нагрузка «вентиляторная», то Итак для сохранения

При уменьшении частоты изменяется индуктивное сопротивление и поэтому при низких частотах индуктивное сопротивление оказывается соизмеримым с R1, которым пренебрегали. При увеличении частоты Тормозные режимы АД 1.Генераторное торможение. Если под действием внешнего момента частота вращения ротора превысит частоты вращения поля, то скольжение меняет свой знак и ЭДС и активная составляющая тока меняют свой знак и момент машины.
тогда машина переходит в генераторный режим и появляется тормозной момент, который не даёт двигателю возможности разгоняться до бесконечности. Генераторное торможение возникает автоматически в многоскоростных двигателях при переключении с высокой скорости на низкую. В первоначальный момент ротор вращается со скоростью большей скорости поля статора и двигатель тормозится. Способ является экономичным. 2.Торможение противовключением. В этом режиме ротор вращается в сторону противоположную скорости вращения магнитного поля. Возможны два способа: торможение с реактивной моментом и с активным моментом нагрузки. а) Применяется как для двигателей с фазным, так и с коротко замкнутым ротором. Для торможения противовключением изменяют направление вращения магнитного поля. при этом ротор по инерции продолжает вращаться в прежнем направлении, а поле в противоположном. В результате машина переходит в режим противовключения, возникает тормозной режим и обороты двигателя уменьшаются. При остановке ротора двигатель необходимо отключить от сети.
б) Применяется для двигателя с фазным ротором. Для реализации этого способа в цепь ротора включается добавочное сопротивление большой величины, чтобы Мдв оказался меньше момента нагрузки. Тогда под действием момента нагрузки возникает тормозной момент, двигатель снижает обороты, при этом возрастает скольжение, возрастает Е ротора, ток ротора и момент двигателя. Процесс снижения скорости будет продолжаться до тех пор, пока момент двигателя не сравняется с моментом нагрузки. При этом обороты двигателя будут зависеть от величины сопротивления. Этот способ находит применение в грузоподъемных механизмах, его используют для спуска с низкими скоростями. Под действием момента нагрузки ротор вращается в противоположном направлении, по отношению к полю, то есть двигатель включен на подъем, а груз опускается.
Процесс противовключения сопровождается значительным выделением энергии. В этом режиме энергия поступает с двух сторон. Из сети потребляемая электрическая энергия, а к валу подводится механическая энергия, либо энергия вращающихся масс или потенциальная энергия груза. оба вида энергии суммируются и происходит повышенный нагрев. при реактивном моменте процесс кратковременннен. При работе с активным моментом большая часть энергии выделяется в добавочном сопротивлении. 3. Динамическое торможение: Применим для обоих типов АД. При этом обмотка статора отключается от сети напряжения и подключается к источнику постоянного тока пониженного напряжения. Под действием напряжения по обмотке статора протекает постоянный ток и в зазоре создается неподвижное магнитное поле, которое пересекает обмотку, вращающуюся по инерции ротора. В ней наводится ЭДС вращения, под действием которой протекает ток и создается тормозной момент. ротор уменьшает обороты, Евр и Iр уменьшаются и эффект торможения падает. при n=0 Евр=0 следовательно Iр=0 и Мторм=0. Для схватывания ротора обычно применяют механический тормоз.
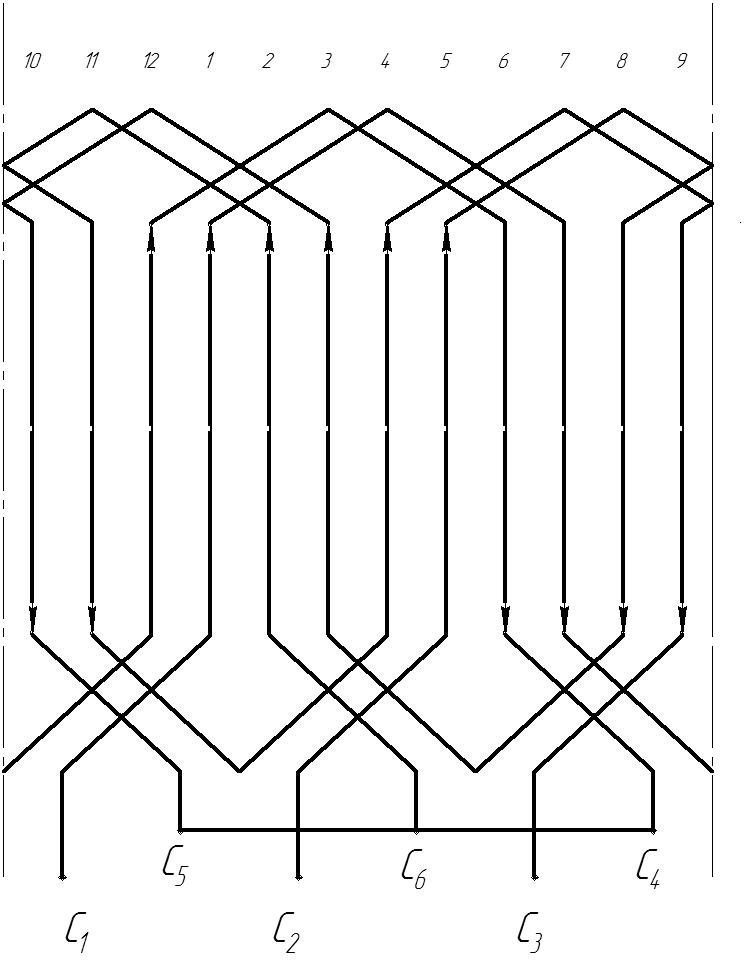
3-х фазные обмотки для машин с изменением числа пар полюсов Способы изменения числа пар полюсов: 1)На статоре укладывается 2 обмотки с разными p. Недостаток этого способа в том, что во время работы одна из обмоток не используется 2)В машине 2 обмотки, причем каждая позволяет изменять число р. 3)На статоре 1 обмотка, позволяющая изменять р. На практике наиболее часто используется обмотки, в которых изменение числа полюсов достигается либо за счет последовательно, либо включения катушечных групп. Часть асинхронных машин выполняется с фазным ротором. В этом случае на роторе выполняется 3-х фазная обмотка, которая соединяется в «звезду», а три свободных конца выводятся на контактные кольца. Используются волновые обмотки постоянного тока, для межкатушечных соединений используются лобовые части самих катушек, что более компактно: z=12; 2p=2; m=3;
Асинхронные машины МДС высших гармоник. Кривая распределения МДС в зазоре асинхронной машины отлична от синусоиды. Для анализа процессов ее раскладывают в гармонический ряд и ограничиваются первой гармоникой. Однако высшие гармоники не исчезают, они имеют место и влияют на характер процессов и на рабочие характеристики АД. Рассмотрим влияние высших гармоник. Для 1-й гармоники получаем бегущее магнитное поле
Для 3-й гармоники Для пятой гармоники:
Для седьмой гармоники:
Рассмотрим скорости движения высших гармоник:
|
|||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-09-18; просмотров: 1417; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.11 (0.015 с.) |

 , а
, а  . т.к. имеем 3 вектора одинаковой амплитуды смещенные по фазе на 1200.
. т.к. имеем 3 вектора одинаковой амплитуды смещенные по фазе на 1200. ;
;










 , но т.к. полюсное деление уменьшено в ν раз, то число полюсов, расположенных по окружности статора в ν раз больше. Тогда:
, но т.к. полюсное деление уменьшено в ν раз, то число полюсов, расположенных по окружности статора в ν раз больше. Тогда:

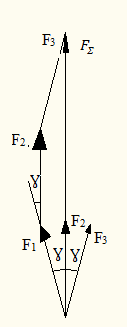 Ось второй катушки совпадает с осью катушечной группы. Оси первой и третьей катушки сдвинутые по фазе на углы - γ и + γ
Ось второй катушки совпадает с осью катушечной группы. Оси первой и третьей катушки сдвинутые по фазе на углы - γ и + γ
 –центральный угол.
–центральный угол.

 зависит от q. При q=1.
зависит от q. При q=1.



 . Для нормальной работы электрической машины необходимо устранять высшие гармоники, приближая ЭДС к синусоиде. Для этого используется распределение обмотки укорочение шага
. Для нормальной работы электрической машины необходимо устранять высшие гармоники, приближая ЭДС к синусоиде. Для этого используется распределение обмотки укорочение шага







 числу витков обмотки статора и это приходится учитывать при расчетах. Для обеспечения расчетов считают, что обмотка ротора идентична обмотки статора, но ее параметры изменены так, чтобы энергетический процесс машины не изменился.
числу витков обмотки статора и это приходится учитывать при расчетах. Для обеспечения расчетов считают, что обмотка ротора идентична обмотки статора, но ее параметры изменены так, чтобы энергетический процесс машины не изменился.








 .
. Чаще используют МДС обмоток. Будем считать, что
Чаще используют МДС обмоток. Будем считать, что 0=
0= 


 0=
0=  Ф она потребляется для его создания.
Ф она потребляется для его создания. 2’) Ток потребляемый АМ в рабочем режиме состоит из тока х.х., вторая составляющая компенсирует размагничивающее действие роторной цепи.
2’) Ток потребляемый АМ в рабочем режиме состоит из тока х.х., вторая составляющая компенсирует размагничивающее действие роторной цепи.


 s должна изменить свой знак. При этом и ток ротора изменит свой знак. Поскольку ток ротора сдвинут по фазе относительно Е, то ток состоит из двух составляющих – активной и реактивной.
s должна изменить свой знак. При этом и ток ротора изменит свой знак. Поскольку ток ротора сдвинут по фазе относительно Е, то ток состоит из двух составляющих – активной и реактивной.


 В режиме генератора Вм < 0 это значит, что механическая энергия подведенная к валу машины преобразуется в электрическую энергию, которая отдается в сеть.
В режиме генератора Вм < 0 это значит, что механическая энергия подведенная к валу машины преобразуется в электрическую энергию, которая отдается в сеть. Процесс самовозбуждения протекает следующим образом. Если в машине существует остаточный магнитный поток, то под его действием в обмотке статора наводиться небольшая ЭДС. Под ее действием по обмотке статора через конденсаторы начинает протекать ток, опережающий ЭДС на угол близкий к 900.
Процесс самовозбуждения протекает следующим образом. Если в машине существует остаточный магнитный поток, то под его действием в обмотке статора наводиться небольшая ЭДС. Под ее действием по обмотке статора через конденсаторы начинает протекать ток, опережающий ЭДС на угол близкий к 900. Такой генератор прост по устройству, но имеет ряд недостатков. Процесс самовозбуждения наступает при определенной частоте вращения. Напряжение такого генератора не является стабильным, оно зависит от нагрузки и частоты вращения.
Такой генератор прост по устройству, но имеет ряд недостатков. Процесс самовозбуждения наступает при определенной частоте вращения. Напряжение такого генератора не является стабильным, оно зависит от нагрузки и частоты вращения.
 В режиме электромагнитного тормоза из сети потребляется э/м мощность. Так же в этом режиме к валу подводится механическая энергия. Эти энергии суммируются и превращаются в тело. В результате двигатель интенсивно нагревается и поэтому этот режим можно допускать кратковременно.
В режиме электромагнитного тормоза из сети потребляется э/м мощность. Так же в этом режиме к валу подводится механическая энергия. Эти энергии суммируются и превращаются в тело. В результате двигатель интенсивно нагревается и поэтому этот режим можно допускать кратковременно.













 M
M 




 не зависит от
не зависит от  . Режиму двигателя соответствует «+», генератору «-». В двигательном режиме момент определяется подведенной мощностью за вычетом потерь в цепи статора. В генераторном момент соответствует моменту приводимого двигателя, поэтому момент генератора должен обеспечить полезную нагрузку и покрыть потери в генераторе.
. Режиму двигателя соответствует «+», генератору «-». В двигательном режиме момент определяется подведенной мощностью за вычетом потерь в цепи статора. В генераторном момент соответствует моменту приводимого двигателя, поэтому момент генератора должен обеспечить полезную нагрузку и покрыть потери в генераторе.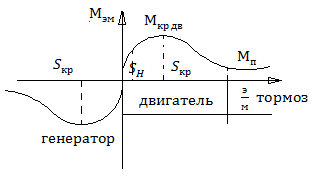 Для нахождения номинального Мэм необходимо в выражение Мэм подставить номинальное скольжение.
Для нахождения номинального Мэм необходимо в выражение Мэм подставить номинальное скольжение.

 до +
до +  , то можно рассчитать зависимость М=f(s). При s=1 получаем выражение для пускового момента (Мп).
, то можно рассчитать зависимость М=f(s). При s=1 получаем выражение для пускового момента (Мп).





 . Для крупных машин
. Для крупных машин  .
. .
. так как
так как  . Обороты линейно уменьшаются
. Обороты линейно уменьшаются  . Ток, потребляемый двигателем из сети, определяется током холостого хода и током ротора.
. Ток, потребляемый двигателем из сети, определяется током холостого хода и током ротора.  поэтому с ростом нагрузки ток линейно увеличивается. Кроме этого ток содержит составляющие компенсирующие потери, а потери пропорциональны I2.
поэтому с ростом нагрузки ток линейно увеличивается. Кроме этого ток содержит составляющие компенсирующие потери, а потери пропорциональны I2.



 . С ростом нагрузки, активная энергия, потребляемая из сети, возрастает и
. С ростом нагрузки, активная энергия, потребляемая из сети, возрастает и  растет и достигает максимума в районе номинального режима. При значительном увеличении нагрузки скольжение машины увеличивается быстрее. при этом растет
растет и достигает максимума в районе номинального режима. При значительном увеличении нагрузки скольжение машины увеличивается быстрее. при этом растет  , следовательно
, следовательно 
 зависит от схемы обмотки
зависит от схемы обмотки =0,59 – 3-х фазной однослойной
=0,59 – 3-х фазной однослойной =0,42 – 3-х фазной двухслойной
=0,42 – 3-х фазной двухслойной =0,19 – 2-х фазной двухслойной
=0,19 – 2-х фазной двухслойной - длина лобовых частей
- длина лобовых частей
 .
Большие значения
.
Большие значения  относятся к АД с фазным ротором, у которых сцепление между обмотками статора и ротора для высших гармоник практически отсутствует. Меньшее значение
относятся к АД с фазным ротором, у которых сцепление между обмотками статора и ротора для высших гармоник практически отсутствует. Меньшее значение  относится к АД с короткозамкнутым ротором
относится к АД с короткозамкнутым ротором
 .
.

 .
. и соответственно возрастает активная составляющая тока, а момент пропорционален именно активной составляющей.
и соответственно возрастает активная составляющая тока, а момент пропорционален именно активной составляющей. . Для крупных машин R1 мало
. Для крупных машин R1 мало . Для обеспечения плавного запуска двигателя, его осуществляют в несколько ступеней. Для этого добавочное сопротивление в цепи ротора разбивают на несколько ступеней, которые последовательно закорачиваются в процессе разгона.
. Для обеспечения плавного запуска двигателя, его осуществляют в несколько ступеней. Для этого добавочное сопротивление в цепи ротора разбивают на несколько ступеней, которые последовательно закорачиваются в процессе разгона.
 . Несмотря на этот способ,его рекомендуется применять там, где сети выдерживают такие пусковые токи.
. Несмотря на этот способ,его рекомендуется применять там, где сети выдерживают такие пусковые токи. .
.
 .
. , то при уменьшении тока в k раз, момент падает в k2 раз. Поэтому этот способ применим в тех случаях, когда двигатель запускается без нагрузки. Используется для крупных машин.
, то при уменьшении тока в k раз, момент падает в k2 раз. Поэтому этот способ применим в тех случаях, когда двигатель запускается без нагрузки. Используется для крупных машин. , где k<1.
, где k<1.  .
. При использовании автотрансформатора, пусковой ток, потребляемый из сети, уменьшается в k2 раз. Следовательно, при этом способе пусковой момент уменьшается в то же число раз, что и пусковой ток. Применяется редко, для крупных машин.
При использовании автотрансформатора, пусковой ток, потребляемый из сети, уменьшается в k2 раз. Следовательно, при этом способе пусковой момент уменьшается в то же число раз, что и пусковой ток. Применяется редко, для крупных машин.
 раз меньше линейного, поэтому
раз меньше линейного, поэтому  уменьшается в
уменьшается в  раз, а MП в 3 раза. После разгона обмотка включается по схеме «треугольник». Применяется в том случае, если обмотка двигателя рассчитана на линейное напряжение.
раз, а MП в 3 раза. После разгона обмотка включается по схеме «треугольник». Применяется в том случае, если обмотка двигателя рассчитана на линейное напряжение. . При протекании тока по проводнику происходит эффект вытеснения тока, в результате которого плотность тока распределяется неравномерно. На поверхности проводника плотность тока высокая, а в центре низкая. В роторе проводник окружен сталью и эффект вытеснения здесь отличается.
. При протекании тока по проводнику происходит эффект вытеснения тока, в результате которого плотность тока распределяется неравномерно. На поверхности проводника плотность тока высокая, а в центре низкая. В роторе проводник окружен сталью и эффект вытеснения здесь отличается. .
.
 .
. , момент зависит от индуктивности сопротивлений. Следовательно, при постоянном напряжении сети изменяется ток и момент двигателя. Для нормальной работы необходимо, чтобы
, момент зависит от индуктивности сопротивлений. Следовательно, при постоянном напряжении сети изменяется ток и момент двигателя. Для нормальной работы необходимо, чтобы  .
.

 .
.
 - выражение описывает основной закон частотного регулирования.
- выражение описывает основной закон частотного регулирования. или
или  .
. .
. необходимо помимо изменения частоты питания изменять напряжение сети.
необходимо помимо изменения частоты питания изменять напряжение сети.
 увеличивается, а напряжение по условиям нормальной работы повышать нельзя, поэтому момент падает. Способ обеспечивает широкий диапазон регулирования, сохраняет жесткость характеристик, возможно плавное регулирование. Несмотря на дороговизну преобразователей частоты в настоящее время этот способ находит наибольшее применение.
увеличивается, а напряжение по условиям нормальной работы повышать нельзя, поэтому момент падает. Способ обеспечивает широкий диапазон регулирования, сохраняет жесткость характеристик, возможно плавное регулирование. Несмотря на дороговизну преобразователей частоты в настоящее время этот способ находит наибольшее применение.