Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Моделирование автоматизированного электроприводаСодержание книги
Поиск на нашем сайте
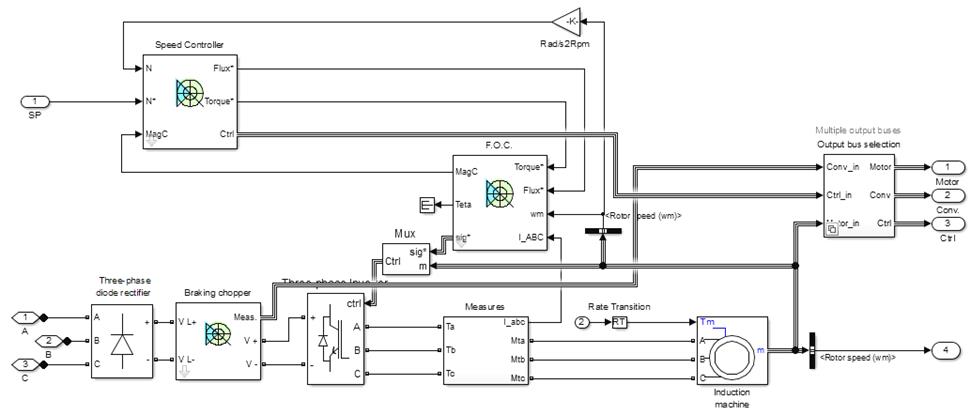
Принцип векторного управления асинхронным двигателем основан на преобразовании измеренных в неподвижной системе a, b координат двигателя (напряжений, токов, потокосцеплений и т.п.) к вращающейся системе координат x, y. В результате такого преобразования выделяются составляющие соответствующих обобщенных векторов во вращающейся системе координат, которые будут иметь постоянные, в установившемся режиме, значения. Регулирование их позволяет осуществить раздельное управление скоростью и потокосцеплением АД. В средеMATLAB Simulink имеется готовое решение для моделирования системы ПЧ-АД, он представлен в виде блока Field-Oriented Control Induction Motor Drive. В него входит диодный выпрямитель, фильтр, тормозной резистор, инвертор, асинхронный двигатель, контроллер ориентации поля F.O.C. и контроллер скорости. Схема блока приведена на рисунке 4.9.
Рисунок 4.9 – Схема блока Field-OrientedControl Induction Motor Drive Контроллер скорости основан на ПИ-регуляторе, как показано на рисунке 4.10.
Рисунок 4.10 – Схема ПИ-регулятора скорости
Блок F.O.C. содержит одиннадцать основных параметров. Параметр ψr используется для оценки потока ротора двигателя. Параметр θe используется, чтобы найти угол поток ротора вращающегося поля. ABC-DQ блок выполняет преобразование ABC фазовых переменных в DQ компонентов потока ротора вращающейся системе поля. DQ-ABC блок выполняет преобразование DQ компоненты потока ротора вращающегося поля в ABC фазовых переменных. IQS * вычислительный блок использует рассчитанный поток ротора и задание момента, чтобы вычислить ток статора квадратурной составляющей, необходимой для получения электромагнитного момента на валу двигателя. Идентификатор * блока использует ссылку на поток ротора, чтобы вычислить ток статора прямой составляющей, который необходимым для получения потока ротора. Ток регулируется в зависимости от петли Гистерезиса. Переключение блок управления используется для ограничения частоты преобразователя коммутации до максимального значения, указанного пользователем. Контроллер потока используется для управления потока в динамике и уменьшения ошибки статичного потока. Вектор намагниченности устройство содержит вектор, используемый для создания начального потока двигателя. Блок управления намагниченности содержит логику, используемую для переключения между намагниченностью и нормальным режимом работы.
Схема контроллера F.O.C. изображена на рисунке 4.11.
Рисунок 4.11 – Схема контроллера F.O.C.
Общий вид схемы модели системы ПЧ – АД представлена на рисунке 4.12. Система работает от 2 задающих сигналов на блок F.O.C.: 1) здание на скорость; 2) задание на момент.
Рисунок 4.12 – Схема для моделирования системы ПЧ-АД
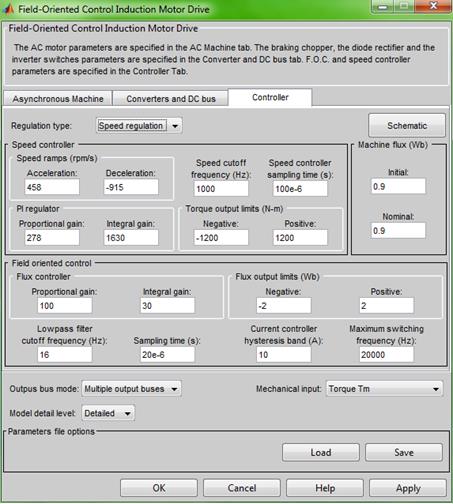
На рисунке 4.13 представлен ввод данных в окна блока Field-OrientedControl Induction Motor Drive.
Рисунок 4.13 – Ввод данных в панель блока Field-OrientedControl Induction Motor Drive
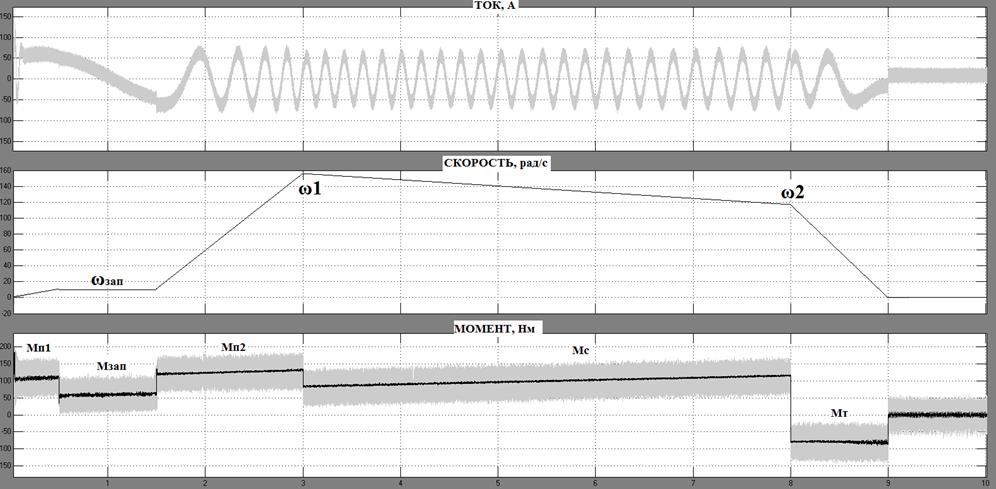
Анализ динамических процессов Динамическим процессом является процесс изменения функционального состояния системы. Система находится в динамическом процессе тогда, когда происходит изменение. Отсюда, динамический процесс – это процесс перехода системы с одного стационарного уровня на другой. Если скорость изменения внешних воздействий превышает скорость установления заданного результата действия системы, то появляются переходные процессы (мультимикроциклы), во время которых также происходит изменения. Поэтому эти переходные процессы также являются динамическими.. Следует отметить, что стационарное состояния также является процессом, но установившимся (стационарным) процессом. В таких случаях состояние систем от цикла к циклу не меняется. Во время каждого цикла в системе происходит очень много различных динамических процессов, потому что система сама состоит из подсистем, в каждой из которых есть свои циклы и свои процессы. Установившийся процесс сохраняет систему в одном и том же функциональном состоянии и на одном и том же стационарном уровне. По определению, данному выше, если система не меняет своего функционального состояния, то она находится в стационарном состоянии. Следовательно, установившийся процесс и стационарное состояние – это одно и то же, потому что независимо от того, находятся ли системы в стационарном состоянии или в динамическом процессе, в их подсистемах всегда могут быть какие-либо стационарные или динамические процессы. На рисунке4.14 представлены переходные процессы получившиеся при моделированиисхемы изображенной на рисунке 4.12.
Рисунок 4.13 – Переходные процессы получившиеся при моделирования схемы в программной среде MatLAb 2013 Simulink
|
||||||||||||
|
|
Последнее изменение этой страницы: 2016-08-16; просмотров: 987; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.118.32.6 (0.009 с.) |