Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Місце будівельної механіки серед інженерних наук. Основні гіпотези в будівельній механіці.Содержание книги
Поиск на нашем сайте
- Будівельна механіка – це дисципліна, яка вивчає основні методи розрахунку буд. конструкцій під дією довільного силового навантаження на міцність, жорсткість, стійкість. Задачі дисципліни: А) дослідження раціональних форм утворення розрахункових схем; Б) обчислення величин напруженого деформованого стану (напружень та зусиль) в довільних перерізах стержневої конструкції; В) обчислення та аналіз пружних деформацій стержневих систем. Г) розрахунок конструкцій на стійкість. Основні гіпотези: А) Матеріал є однорідним і ізотропним; Б) Тіло є абсолютно пружним; В) Тіло є лінійно деформованим; Г) Гіпотеза малих деформацій; Д) Гіпотеза плоских перерізів; Е) Гіпотеза ненапруженого стану. Розрахункові схеми споруд, їх класифікація. - Розрахункова схема – це спрощене ідеалізоване представлення конструкцій з урахуванням певних припущень. При цьому: А)стержні споруди показують їх осями; Б)ідеалізують опорні та вузлові з’єднання (або ідеальний шарнір або абсолютно жорсткий вузол); В)виключають непрацюючі стержні, тобто ті, які не навантажені і не потрібні для забезпечення стійкості споруди; Г)ідеалізують навантаження на споруду; Д)перевіряють геометричну незмінність системи (переміщення можливі тільки в результаті деформацій).
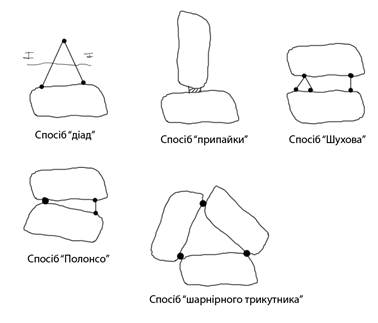
Кінематичний аналіз споруд. Ціль та етапи його виконання - Кінематичний аналіз – це кількісний та якісний етапи дослідження здатності будівлі (споруди) зберігати свою початкову форму. Послідовність виконання кінематичного аналізу: Виконання кінематичного аналізу розрахункової схеми споруди можна поділити на три етапи. • Кількісний етап. Кількісний етап кінематичного аналізу полягає у визначені ступеня геометричної змінюваності системи (кількості незалежних параметрів) що визначають положення тіла на площині) за формулою Чебишева: Г=3Д+2В-3П-2Ш-С-З, де Г – ступінь геометричної змінюваності системи на площині. Д – кількість простих дисків В – кількість вузлів Ш – кількість простих шарнірів С – кількість простих кінематичних в’язей; З – число (ступінь вільності тіла на площині) Якщо результат Г > 0, система геометрично змінювана. Якщо Г = 0, система статично визначена Г < 0, система статично невизначена У двох останніх випадках треба перейти до виконання якісного етапу. • Якісний (структурний) етап полягає у визначенні послідовних способів утворення геометрично незмінюваних систем. З’єднання дисків повинно здійснюватися з використанням простих існуючих способів з’єднання дисків. Якісний етап кінематичного аналізу дає змогу визначити послідовність статичності розв’язку стержневих систем. • Остаточний висновок про геометричну незмінюваність, геометричну або миттєву змінюваність розрахункової схеми споруди. Якщо доведено правильне приєднання всіх елементів системи, вся розрахункова схема може вважатись геометрично незмінюваною. Якщо виявляється, що для з’єднання одних елементів використані зайві пристрої, а для інших їх бракує, всю розрахункову схему вважають геометрично змінюваною. Якщо ж хоча б одне з’єднання виконується за винятком з якогось способу, що відповідає миттєвій змінюваності фрагмента, розрахункова схема вважається миттєво змінюваною. Таким чином, для геометричної незмінюваності плоскої розрахункової схеми споруди необхідне додержання двох умов: необхідна умова Г ≤ 0; достатня умова − правильність утворення системи. Визначення ступеня геометричної змінюваності плоских систем. Формула Чебишева. - Кількісний етап. Кількісний етап кінематичного аналізу полягає у визначенні ступеню геометричної змінюваності системи (кількості незалежних параметрів, що визначають положення тіла на площині) за формулою Чебишева: Г=3Д+2В-3П-2Ш-С-3; Г – ступінь геометричної змінюваності системи на площині; Д – кількість простих дисків; В – кількість вузлів; Ш – кількість простих шарнірів; С – кількість простих кінематичних в’язей; 3 – число (ступінь вільності тіла на площині Якщо результат Г > 0, система геометрично змінювана Г = 0, система статично визначена, Г < 0, система статично невизначена. Способи утворення геометрично незмінюваних плоских систем. 1. Приєднання вільного вузла до нерухомого диску: - спосіб “діад”; 2. З’єднання двох дисків 2.1 Спосіб припайки; 2.2. Спосіб Шухова; 2.3. Спосіб Полонсо; 3. З’єднання трьох дисків - Спосіб шарнірного трикутника
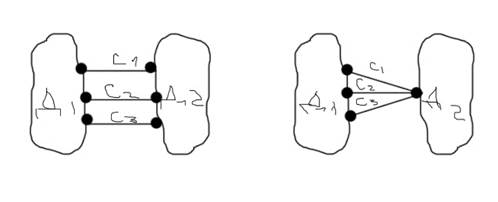
Ознаки геометричної змінюваності плоских систем. Миттєва змінюваність плоских систем. Якщо в’язі паралельні або перетинаються в одній точці, то це миттєво змінювані системи.
|
||||
|
|
Последнее изменение этой страницы: 2016-08-16; просмотров: 929; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.12.73.221 (0.006 с.) |