Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Настройка контура оценивания.Содержание книги Поиск на нашем сайте
Так как
Введем обозначение (отсюда можно заключить, что L вектор):
Собственные числа матрицы
И делаем аналогичные предыдущему разделу операции. Запишем характеристическое уравнение матрицы
Приведем это уравнение к виду:
При перемножении и подстановки выбранных желаемых собственных чисел:
И уже найденные коэффициенты:
Вводим промежуточный вектор
А искомый L определяется:
Позволю себе и здесь также провести вычисления с помощью пакета MatLab, приводя лишь промежуточные результаты.
Найдем теперь вектор L, через встроенные функции MatLab, задавая вектор желаемых собственных значений замкнутой системы, в данном случае создавать отдельный М-файл не имеет смысла, так как задача решается одной командой (считаем, что A и с уже заданы). Так как команда предназначена для определенных размерностей входных величин, то транспонируем все, что потребуется: >> l=place(A',c',[-110 -120 -130]) l = 1.0e+004 * 0.8940 1.1482 0.0250 Как видно, результаты, полученные аналитически и с помощью MatLab, совпали, значит, расчеты верны. Построим матрицу
Завершение построения системы. Запишем полученную замкнутую систему в виде:
Для простоты и наглядности получения параметров префильтра перейдем к описанию системы в виде передаточной функции. С легкостью можно получить передаточную функцию системы, подставив в MatLab описание замкнутой системы в переменных состояния (М-файл №7 в приложении):
Transfer function: 0.78s+36.8 ------------------------------------ s^3 + 270 s^2 + 2.42e004 s + 7.2e005
Если с помощью MatLab посчитать корни знаменателя, то они полность совпадут с желаемыми: >> >> roots([1 270 2.42e004 7.2e005]) -100.0000 -90.0000 -80.0000 Сравнение результатов автоматического управления по средством обратнай связи с командным управлением В этом пункте я сравниваю реакцию на ступенчатое воздействие системы без обратной связи (ручное управление) с реакцией автоматически управляемой системой. Система без обратных связей:
Система управляемая автоматически:
Вывод. В результате, мы задали объект управления со своими свойствами (разнотемповое двухотраслевое производство с перекрестными связями), исследовали основные характеристики объекта, такие как: устойчивость, минимальнофазовость, управляемость и наблюдаемость, исходя из критериев, наложенных на наш обыект управления, подобрали некоторые параметр. Затем имея готовый объект с исследованными свойствами, найденными передаточными и весовыми функциями, а также частотными характеристиками, поставили задачу управления этим объектом. Улучшили свойства объекта, потребовав более быстрое время установления без колебательности. Также был определен вид управления системой, который реализует управление системой по оценке вектора состояния, и предложен вид структурной схемы, которая позволяет задавать желаемое значение выхода и получать его с течением времени.
Приложение М-файл №1. Часть 1. Раздел 2.2 (определение передаточной функции). syms a1 a2 k p k1 k2 A=[-100 a1 0; a2 -10 0; k1 k2 0]; B=[k;1-k;0]; C=[0 0 1]; E=[1 0 0; 0 1 0; 0 0 1]; H=C*inv(p*E-A)*B
М-файл №2. Часть 1. Раздел 2.3 (определение весовой функции). syms t a1 a2 k p k1 k2 hm=C*expm(A*t)*B pause h=ilaplace (k*(10*k1 + a2*k2 + k1*p))/(p*(p^2 + 110*p - a1*a2 + 1000)) - ((k - 1)*(100*k2 + a1*k1 + k2*p))/(p*(p^2 + 110*p - a1*a2 + 1000)),t) (1) pause a1=1; a2=2; k=0.8; t=2; k1=0.8; k2=0.7; h=… (2) hm=… (3) h1=… (4)
(1) – выражение взято из М-файла №1 (2) – ответ, полученный в четвертой строчке (3) – ответ, полученный во второй строчке (4) – ответ, полученный аналитически М-файл №3. Часть 1. Раздел 2.5 (частотные характеристики). syms a1 a2 k w k1 k2 A=[-100 a1 0; a2 -10 0; k1 k2 0]; B=[k;1-k;0]; C=[0 0 1]; E=[1 0 0; 0 1 0; 0 0 1]; H=C*inv(i*w*E-A)*B
pause a1=1; a2=2; k=0.8; k1=0.8; k2=0.7; w=2; modh=abs(…) (1) modh1=… (2) argh=angle(…) (3) argh1=… (4)
(1) – выражение для Н (шестая строчка) (2) – аналитическое выражение модуля (3) – выражение для Н (шестая строчка) (4) – аналитическое выражение аргумента
М-файл №4. Часть 1. Раздел 3.3 (управляемость и наблюдаемость). syms a1 a2 k k1 k2 A=[-100 a1 0; a2 -10 0; k1 k2 0]; B=[k;1-k;0]; C=[0 0 1]; E=[1 0 0; 0 1 0; 0 0 1]; P=[B A*B A*A*B] Q=[C' A'*C' A'*A'*C'] pause dP=det(P) dQ=det(Q) pause a1=80; a2=5; k=0.8; dP=… (1) dQ=… (2)
(1) – выражение, полученное для dP (2) – выражение, полученное для dQ
М-файл №5. Часть 1. Раздел 4 (импульсное, ступенчатое и гармоническое воздействия). sys1=tf(1,[1 100]); sys2=tf(1,[1 10]); impulse(sys1) grid on hold on impulse(sys2) figure step(sys1) grid on hold on step(sys2) figure bode(sys1) grid on hold on bode(sys2)
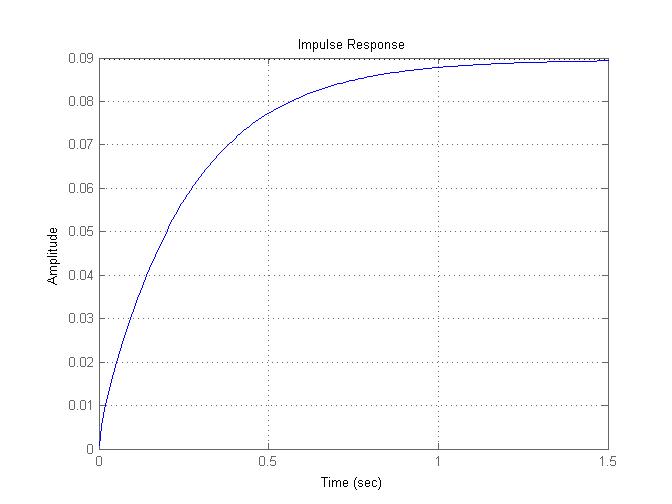
М-файл №6. Часть 1. Раздел 4 (импульсное, ступенчатое и гармоническое воздействия). sys1=tf([0.8 23],[1 110 410.717]); sys2=tf([0.2 26.28568],[1 110 410.717]); sys3=tf([0.78 36.8],[1 110 410.717 0]); impulse(sys1) grid on hold on impulse(sys2) figure impulse(sys3) grid on figure step(sys1) grid on hold on step(sys2) figure step(sys3) grid on figure bode(sys1) hold on grid on bode(sys2) figure grid on bode(sys3) figure nyquist(sys1) hold on grid on nyquist(sys2) figure grid on nyquist(sys3)
М-файл №7. Часть 2. Раздел 4 (Завершение построения системы)
A=[-100 75 0; 7.8571 -10 0; 0.8 0.7 0]; B=[0.8; 0.2; 0]; C=[0 0 1]; K=10000*[0.0152 0.0191 1.9565]; L=10000*[0.8940 1.1482 0.0250]; A1=[A-B*K B*K; zeros(3,3) A-L'*C]; B1=[B;0;0;0]; C1=[C 0 0 0]; sys=ss(A1,B1,C1,0)
Корневой годограф.
q=-4000:5:4000; for i=1:1601 l1(i)=-55-sqrt(2025+q(i)); l2(i)=-55+sqrt(2025+q(i)); plot(real(l1(i)),imag(l1(i)),real(l2(i)),imag(l2(i))) hold on end
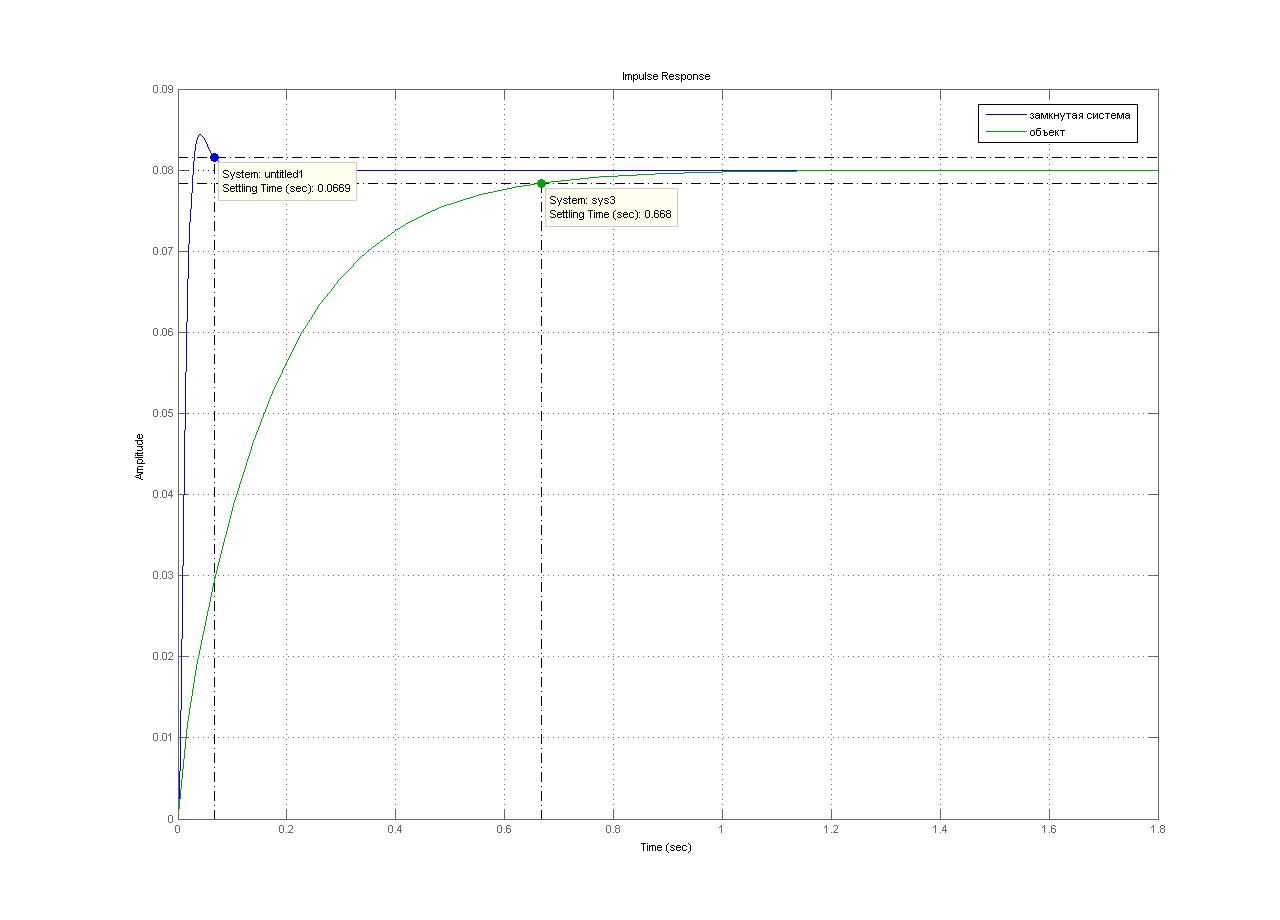
Как видно по графику время установления системы с регулятором в 10 раз меньше, чем у объекта. На графике представлена реакция объекта на импульсное воздействие, а в качестве желаемого значения для выхода уже замкнутой системы взят этот установившийся режим (0.08).
|
|||||||||
|
|
Последнее изменение этой страницы: 2016-08-01; просмотров: 144; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.138.179.120 (0.009 с.) |

 , для управления по вектору состояния, нам требуется найти его оценку по известной модели и выходу. Таким образом, строим алгоритм оценивания, в котором требуется матрица невязки L. А
, для управления по вектору состояния, нам требуется найти его оценку по известной модели и выходу. Таким образом, строим алгоритм оценивания, в котором требуется матрица невязки L. А  – ошибка оценивания.
– ошибка оценивания.



 должны обеспечивать любое наперед заданное стремление ошибки к нулю, чтобы оценка вектора состояния была точной. Стоит задача выбора собственных чисел матрицы
должны обеспечивать любое наперед заданное стремление ошибки к нулю, чтобы оценка вектора состояния была точной. Стоит задача выбора собственных чисел матрицы  , так чтобы оценка вектора состояния происходила быстрее, чем процессы в системе. Поэтому требуется собственные числа матрицы сделать меньше, чем полученные в предыдущем разделе. Потребуем, также чтобы оценка стремилась к нулю апериодически, то есть собственные значения должны быть вещественные
, так чтобы оценка вектора состояния происходила быстрее, чем процессы в системе. Поэтому требуется собственные числа матрицы сделать меньше, чем полученные в предыдущем разделе. Потребуем, также чтобы оценка стремилась к нулю апериодически, то есть собственные значения должны быть вещественные
 .
.



 , которая зависит от установленных значений собственных чисел контура оценивания и исходной матрицы А:
, которая зависит от установленных значений собственных чисел контура оценивания и исходной матрицы А: