
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Пуск двигателя постоянного тока, пускового реостатаСодержание книги
Поиск на нашем сайте
Пуск-наиболее характерный ПП Всплеск пускового тока Прямым пуском можно пускать лишь микро двигатели. Для пуска энергетик. ДПТ необходимо снижать U, подаваемое на щетки. Цель - чтобы пусковой ток был достаточен для создания пускового момента и безопасен для ОЯ. Снижение U: -с-ма «Г-Д» -терристорный преобразователь - реостатный (введение Цель При разгоне двигателя При Пуск ДПТ должен происходить только при полном магнитном потоке (полное возбуждение) Пусковое сопротивление рассчитано на 10-15 сек. работы.Недопустимо использование Требования к пусковому реостату: 1) должен быть рассчитан на пусковые токи и напряжение 2)должен обеспечить определенную скорость изменения 3)обеспечить определенные ступени регулирования 4)обеспечение 5)при выключении питания желателен автомат. возврат пускового реостата в исходное положение.
53 Рабочие характеристики ДПТ
Ток возростает потому что момент созданный двигателем
54 Механические характеристики ДПТ паралельного, последовательного и смешанного возбуждения. Для ДПТ паралельного возбуждения:
а) при изменении основного магнитного потока
б) при изменении напряжения в цепи якоря
а) б)
1) естественная характеристика
2) искусственная характеристика
Для ДПТ смешаного возбуждения:
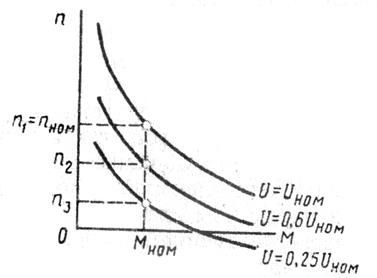
55 Регулировочные процессы в ДПТ. Регулировать частоту вращения двигателя параллельного возбуждения можно изменением сопротивления в цепи якоря, изменением основного магнитного потока Ф, изменением напряжения в цепи якоря. Введение дополнительного сопротивления в цепь якоря. Дополнительное сопротивление (реостат r д) включают в цепь якоря аналогично пусковому реостату (ПР). Однако в отличие от последнего оно должно быть рассчитано на продолжительное протекание тока. С увеличением r д возрастает ∆ n, что ведет к уменьшению частоты вращения. Этот способ обеспечивает плавное регулирование частоты вращения в широком диапазоне, однако он неэкономичен из-за значительных потерь электроэнергии. Изменение основного магнитного потока. Этот способ регулирования в двигателе параллельного возбуждения реализуется посредством реостата грг в цепи обмотки возбуждения. Так, при уменьшении сопротивления реостата возрастает магнитный поток обмотки возбуждения, что сопровождается понижением частоты вращения. При увеличении rрг частота вращения растет. C уменьшением магнитного потока Ф частота вращения п увеличивается по гиперболическому закону. Изменение напряжения в цепи якоря. Регулирование частоты вращения двигателя изменением питающего напряжения применяется лишь при Iв = const, т. е. при раздельном питании цепей обмотки якоря и обмотки возбуждения при независимом возбуждении. Дляосуществления этого способа регулирования необходимо цепь якоря двигателя подключить к источнику питания с регулируемым, напряжением. Изменение напряжения в цепи якоря позволяет регулировать частоту вращения двигателя вниз от номинальной. При необходимости регулировать частоту вращения вверх от номинальной, можно воспользоваться изменением тока возбуждения двигателя. Импульсное регулирование частоты вращения. Цепь обмотки якоря двигателя параллельного (независимого) возбуждения периодически прерывается ключом. Во время замыкания цепи якоря на время t к обмотке якоря подводится напряжение U =Uимп и ток в ней достигает значения Iamax. Затем ключом цепь якоря размыкают и ток в ней убывает, достигая к моменту следующего замыкания цепи значения Iamin. и т. д. Таким образом, к обмотке якоря подводится некоторое среднее напряжение. Таким образом, импульсное регулирование частоты вращения аналогично регулированию изменением подводимого к цепи якоря напряжение.
56. Вид механических характеристик двигателя постоянного тока при регулировании напряжения Для получения аналитического выражения механической характеристики
Подставив в него из
изменения подводимого к двигателю напряжения возможно также при питании двигателя от источника постоянного тока регулируемым напряжениям. При уменьшении подводимого напряжения его механические характеристики смещаются вниз, практически не меняя своей кривизны
56 Вид механических характеристик ДПТ при регулировании напряжения.
57. Вид механических характеристик двигателя постоянного тока при регулировании сопротивления в якорной цепи. Для получения аналитического выражения механической характеристики
Подставив в него из
Угол наклона механической характеристики тем больше, чем больше значения сопротивления, включенного в цепь якоря. Механические характеристики двигателя при отсутствии сопротивления в якорной цепи называют естественной (прямые 1). Механические характеристики двигателя, полученного при введении дополнительного сопротивления в цепь якоря, называют искусственными (прямые 2 и 3).
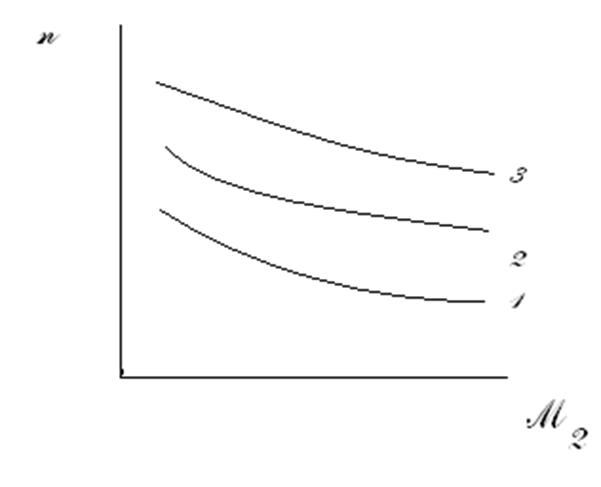
58 Вид мех хар-к ДПТ при регулировании тока возбуждения
Оптимальное полюсное управление(изменение Ф)
Ф3<Ф2<Ф1 Самое дорогое управление в системе генератор двигатель
59. Современные конструкции двигателей постоянного тока Эксплуатационные особенности машин постоянного тока: широкий диапазон регулирования скорости, плавность регулирования скорости, большой пусковой момент при небольшом пусковом токе обеспечивают двигателям постоянного тока более высокую эффективность по сравнению с асинхронными и синхронными двигателями. С ростом динамики изменений в роботе двигателей с учетом современных достижений в электромашиностроении появилось необходимость изменения конструкций традиционных двигателей постоянного тока, эти изменения коснулись исключительно статора, размеры полюсов пытались привязать к существующим сериям асинхронных и синхронных машин. 3 группы двигателей: 1) Унифицированный ДПТ 2) Широко регулируемый ДПТ 3) Крупные ДПТ 1-ая группа характеризуется одинаковым воздушным зазором, и тем, что компенсационная обмотка может компенсировать реакцию якоря. Широко регулируемый ДПТ достигают мощности до 250 кВт. Диапазон регулирования скорости достигает 5000 об. При напряжении от 0 до 400 В. Характерные особенности этих двигателей то, что они допускают диапазон при Крупные ДПТ применяются для привода мощных станков они предназначенные для условий чистых пусков, остановок и реверсов.
|
||||
|
|
Последнее изменение этой страницы: 2016-07-16; просмотров: 65; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.16.70.99 (0.008 с.) |


 при увеличении мощности двигателя.
при увеличении мощности двигателя.
 (угол открытия вентиля)
(угол открытия вентиля) в цель ОЯ)
в цель ОЯ) - достичь
- достичь 
 и
и  . Поэтому необходимо уменьшать
. Поэтому необходимо уменьшать 
 более длительное время.
более длительное время.
 на ОВ
на ОВ

 Для ДПТ последовательного возбуждения:
Для ДПТ последовательного возбуждения: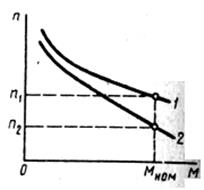

 преобразуем выражения
преобразуем выражения  :
:
 значение тока якоря
значение тока якоря  , получим
, получим 
 - частота вращения в хх;
- частота вращения в хх;  - изменения частоты вращения, вызванное изменением на валу двигателя
- изменения частоты вращения, вызванное изменением на валу двигателя 

 Для ДПТ паралельного возбуждения: Для ДПТ последовательного возбуждения:
Для ДПТ паралельного возбуждения: Для ДПТ последовательного возбуждения: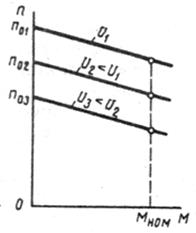
 преобразуем выражения
преобразуем выражения  :
:
 значение тока якоря
значение тока якоря 
 - частота вращения в хх;
- частота вращения в хх;  - изменения частоты вращения, вызванное изменением на валу двигателя
- изменения частоты вращения, вызванное изменением на валу двигателя 

 Статор таких двигателей, шихтованный восьмигранный с ярко выраженными полюсами.
Статор таких двигателей, шихтованный восьмигранный с ярко выраженными полюсами.


