Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
СКУД для сетевого режима работыСодержание книги Поиск на нашем сайте
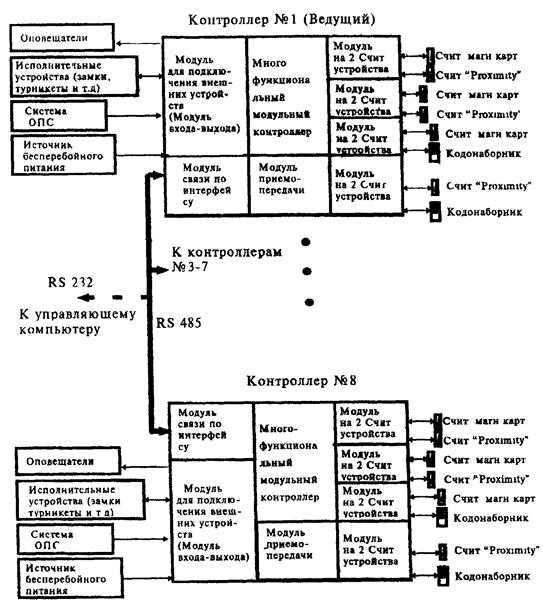
СКУД 3-го и 4-го классов предназначены для оборудования крупных объектов таких как банки, крупные учреждения и фирмы. Несомненным достоинством этих систем является возможность практически не ограниченного расширения. Такие системы позволяют обслуживать десятки тысяч пользователей. В относительно небольших и недорогих системах 3-го класса используется построение системы СКУД, при котором в одну контролируемую линию интерфейса RS 485 включаются все контроллеры, а база данных загружается в один управляющий контроллер (мастер-контроллер). Такое построение обеспечивает гибкость встраивания СКУД в интерьер помещений, минимизацию коммуникационных соединений и большие расстояния между объектами управления. Эффективность работы СКУД 4-го класса, обусловлена возможностью создавать разветвленные, достаточно многочисленные соединения контроллеров и управляющих компьютеров в единую систему. Модульность построения данных систем обеспечивает: - гибкость конфигурации; - простоту монтажа, технического обслуживания и ремонта; - возможность расширения системы; - ценовую эффективность; - легкость сопряжения с устройствами сервисной автоматики (управление лифтом, освещением, системами кондиционирования и т.д.). На рисунке 3 приведена примерная структурная схема построения СКУД 3-го класса (64 контролируемые двери) на базе многофункционального контроллера, имеющего модульную конструкцию. На рисунках 4-6 приведены варианты построения систем 4-го класса. Соединение контроллеров между собой и подключение контроллера к различным периферийным устройствам, входящим в состав системы обеспечивается при помощи различных модулей. К одному контроллеру может быть подключено до 8 считывателей различного типа, например, считыватель магнитных карточек, считыватель бесконтактных карточек, клавиатура (кодонаборник) и д.р. Подключение считывателей осуществляется через соответствующий считывающий модуль, работающий с двумя считывающими устройствами. Помимо считывателей, он также контролирует датчики состояния дверей и кнопки их открывания, другие вспомогательные устройства. Информация о состоянии иных внешних устройств поступает в контроллер через модуль входа/выхода. Посредством этого же модуля контроллер управляет работой исполнительных устройств, устройством выдачи тревожных извещений. Модуль связи обеспечивает объединение контроллеров в единую систему, протяженностью до 1 км с помощью интерфейса RS 485, а также при необходимости объединение контроллеров и управляющего компьютера в компьютеризированную систему с помощью интерфейса RS 232. Модуль приемо-передачи управляет работой считывателей бесконтактных карточек (Proximity). Один контроллер может обслуживать до 10000 пользователей. Для увеличения числа пользователей может применяться модуль расширения памяти. Системы 4-го класса обычно строятся на базе таких же многофункциональных контроллеров, которые используются для построения СКУД 3-го класса, объединенных в единую компьютерную сеть. При создании компьютерной сети контроллеры в количестве до 32 единиц могут быть объединены в одну ветвь в соответствии с рисунком 4. В этом случае модуль связи включается в первый по порядку контроллер ветви. Через него осуществляется связь этого контроллера с компьютером по интерфейсу RS 232. Обмен информацией между контроллерами производит по интерфейсу RS 485. Кроме того, модуль связи осуществляет преобразование формата и скорости передачи данных RS 232/RS 485. Каждый контроллер в ветви имеет свой адрес. Дальнейшее наращивание системы возможно путем организации нескольких (до 10) ветвей контроллеров. Пример организации двух ветвей показан на рисунке 5. Модуль связи первого контроллера преобразовывает с одной стороны поток данных, посылаемых с управляющего компьютера на контроллер, а с другой - поток выходных данных, параллельно подаваемых на адресные модули связи в ветвях. Каждый адресный модуль связи обменивается данными с контроллерами в ветвях и модулями связи. Такая расширенная сеть позволяет обслуживать до 320 контроллеров и 2048 контролируемых точек. При необходимости ветвь контроллеров может быть увеличена еще на 1 км. Для этого удлиняемая ветвь (см. рисунок 6) подключается к первому контроллеру новой ветви через модуль связи. Для связи между контроллерами по прежнему используется интерфейс RS 485. При организации компьютеризированных СКУД рекомендуется применять IBM-совместимые компьютеры типа PENTIUM с ОЗУ 16 МБ и более, двумя последовательными портами и объемом винчестера не менее 528 МБ. Компьютеры этого типа удовлетворяют потребностям любой системы и позволяют модернизировать ее в будущем.
Рисунок 3 - Примерная структурная схема построения СКУД 3-го класса
Рисунок 4 - Примерная структурная схема построения СКУД 4-го класса с одной ветвью
Рисунок 5 - Примерная структурная схема построения СКУД 4-го класса с несколькими ветвями
Рисунок 6 - Увеличение длины ветви при использовании двух модулей связи
Наличие описанных модулей многофункционального контроллера создает большие возможности по управлению разнообразной периферией системы. В качестве контролируемых точек могут выступать считывающие головки, Pin-клавиатуры, замкнутые/разомкнутые контакты кнопок, реле, выходные контакты различных объемных или поверхностных извещателей. В качестве исполнительных устройств могут использоваться электрозамки дверей, исполнительные устройства шлагбаумов, турникетов, устройства тревожного оповещения и освещения, телевизионные камеры и т.д. Логическое устройство (процессор) контроллера позволяет производить необходимую установку параметров доступа в каждой контрольной точке при помощи программного обеспечения, то есть конфигурировать систему. Системщик может задавать параметры (замкнутое/разомкнутое состояние контактов реле или кнопок, состояние и режим работы счетчиков, состояние флатовых регистров, временные интервалы регистраторов событий и т.д.) прямо с клавиатуры компьютера. Это дает возможность реализовывать различные варианты организации контроля и управления доступом, гибко меняя их в соответствии с текущими требованиями. Программа предоставляет большие сервисные возможности оператору, выводя разнообразную информацию на экран. Например, на дисплее компьютера можно иметь план одного или нескольких помещений с обозначенными на нем контролируемыми точками, индикацию несанкционированных проникновении (если требуется - со звуковым сопровождением). На экран могут выводиться многочисленные сообщения, например, полные или краткие отчеты о зарегистрированных событиях с возможностью их распечатки на принтере.
|
||||
|
|
Последнее изменение этой страницы: 2016-07-11; просмотров: 207; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.143.239.63 (0.006 с.) |