
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
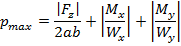
Ядро сечения, среднее и экспериментальные значения давления, деформация грунта гусеничным движителем горной машины.
Если центр давления совпадает с центом опорной поверхности, то давление машины на грунт распределено неравномерно. Это может привести к тому, что даже при допустимом значении среднего давления машина потеряет проходимость из-за больших деформаций грунта в местах с большими местными давлениями. Поэтому кроме среднего давления вычисляют наибольшее и наименьшее значения.
Где Wx и Wy – моменты сопротивления опорной площади относительно тех же осей.
Затраты мощности на прямолинейное передвижение горной гусеничной машины. Силы сопротивления передвижению. Данный расчет требуется для проектного расчета силовой установки машины. В общем случае затраты мощности на передвижение ГМ определяются следующим образом:
Р – равнодействующая сил сопротивления движению гусеничного движителя.
η – КПД передачи от силовой установки ведущей к звездочке гусеницы.
Равнодействующая сил сопротивлении представляет собой следующие составляющие: Р1+Р2+Р3+Р4+Р5+Р6 Р1- сила сопротивления деформирования. Р1=µ*Zp*a*b µ - коэффициент сопротивления деформирования грунта. p- среднее давление гусеничного движителя по грунту. a и b – параметры гусеничного движителя.
Р2 – сила сопротивления передвижению опорных катков движителя. Р2 = k*Za*b*p
P3 – сила сопротивления от скатывающей составляющей силы тяжести машины при движении на подъем.
Коэффициент сопротивления деформированию грунта гусеничным движителем и его составляющие.
Коэффициент сопротивления деформирования грунта входит в состав формулы для определения Р1- сила сопротивления деформирования. Р1=µ*Zp*a*b p- среднее давление гусеничного движителя по грунту. a и b – параметры гусеничного движителя. µ - коэффициент сопротивления деформирования грунта, кот. зависит от деформации грунта. При проектных расчетах его значение берется в специальной литературе.
h- деформация грунта.
В общем случае коэффициент определяется двумя составляющими µ’ и µ”.
σy и σz – напряжение сопротивления деформирования грунта.
µ’=
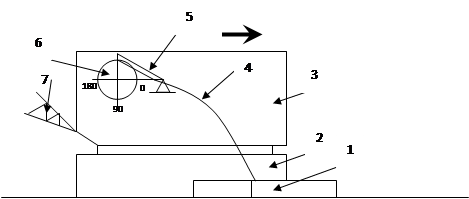
Необходимое и достаточное условия для прямолинейного передвижения горной гусеничной машины. Конструктивное устройство и принцип действия шагающего ходового устройства ГМ, его достоинства и недостатки.
Принципиально экскаватор с шагающим ходовым устройством, например, состоит из опорных метки (базы) цилиндрической формы на которую при работе опирается поворотная платформа с надстройкой 3 и рабочим оборудованием 7. На платформе находится механизм шагания. Механизм шагания состоит из опорных лыж (башмаков) 1, механизма перемещения и привода. При работе экскаватора лыжи подняты над опорной поверхностью и он опирается на базу. На кривошип 6 на роликавых подшипниках посажена стойка 4, соединенная внизу шаровым шарниром с лыжей 1, а вверху через маятниковую тягу 5 надстройкой 3 экскаватора. Вращение кривошипа по часовой стрелке на <900 вызывает подъём и смещение пяты 1 вместе с надстройкой. После этого происходит перемещение и опускание экскаватора, которое закончивается после поворота кривошипа на <1800. Дальнейший поворот до 2700 обеспечивает подъем лыж в самое верхнее положение с одновременным смещением в их среднее положение. При полном обороте кривошипа лыжа возвращается в первоначальное положение (опускается на почву.) Перемещение экскаватора осуществляется путем опирания на опорные лыжи с частичным или полным отрывом лыжи от опорной поверхности и перетаскиванием ее относительно неподвижных лыж двумя механизмами шагания.
|
||||||||
|
|
Последнее изменение этой страницы: 2016-04-26; просмотров: 273; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.219.110.54 (0.009 с.) |

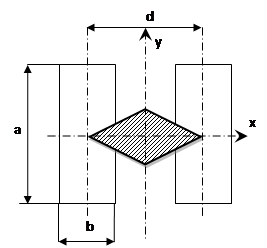 Ядром сечения опорной площади гусеничного хода называется ее часть при расположении в пределах которой центра давления во всех точках опорной площадке отвечает условие Pmin≥0.
Ядром сечения опорной площади гусеничного хода называется ее часть при расположении в пределах которой центра давления во всех точках опорной площадке отвечает условие Pmin≥0.
 - теоретическая скорость передвижения.
- теоретическая скорость передвижения.
 - поправочный коэффициент, зависящий от типа и числа опорных катков.
- поправочный коэффициент, зависящий от типа и числа опорных катков.

 µ”=
µ”= 
 В карьерах средней мощности отвалообразователи, роторные образователи масса которых составляет от 300 до 13-15 тыс. тонн допустимое давление на грунт обеспечивается применением шагающего ходового оборудования с еще более развитой опорной поверхностью.
В карьерах средней мощности отвалообразователи, роторные образователи масса которых составляет от 300 до 13-15 тыс. тонн допустимое давление на грунт обеспечивается применением шагающего ходового оборудования с еще более развитой опорной поверхностью.


