
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Механізм зміни нахилу стрілиСодержание книги Поиск на нашем сайте Цей механізм проектується аналогічно механізму підйому вантажу. Але є відмінності. 1. Навантаження на механізм носить суттєво змінний характер. Це тому, що при малім куті нахилу стріли β найбільше плече сили ваги вантажу, а при великім куті β найменше плече сили натягу топенанта. 2. Швидкість руху вантажу також змінна і залежить від кута β, а також від кратності поліспастів механізму підйому вантажу. Тому треба спочатку знайти позицію стріли, де виникають найбільші сили, а потім провести розрахунки за відомим алгоритмом. З цією метою зобразимо схему механізму в 4-х позиціях (рисунок 5), під кутами β = 20, 35, 50, 65°. Блоки зобразимо точками. Вважатимемо, що блоки механізмів підйому вантажу і механізму підйому стріли розміщені (в точках А і С) дуже близько, майже співпадаютьъ. Плечі зусиль топенанта в 4-х позиціях позначені h1 , h2, h3, h4. Вісь блоків на колоні для збільшення h4 зміщується вліво на відстань Hв. Масштабний коефіцієнт схеми μ L.
Рисунок 5 Кінематика стріли
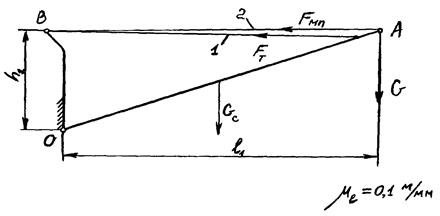
Рисунок 6 Силова схема механізму
1. Топенант 2. В’язка АВ мех.. підйому
Складаємо рівняння моментів сил відносно точки О
Fk* = 45,6 ∙ 103 Н
ККD поліспаста ηn
η1 – KKD одного блока
Сила натягу каната з урахуванням ККD
Швидкість руху каната на барабані
Vк = 0,07 ∙ 4 = 0,28 м/с
Потужність приводу на барабані максимальна
Рб = Fк ∙ Vк
Рб = 47,74 ∙ 103 ∙ 0,28 = 13,4 ∙ 103 Вт
Еквівалентна потужність для двигуна
ηпр - ККD приводу
Далі все так, як в проекті механізму підйому вантажу.
ДОДАТОК А
З’ясуємо якою є інерційність механізму підйому вантажу, як вона впливає на час пуску двигуна і його можливий перегрів. Для цього збудуємо динамічну модель механізму на базі ротора двигуна (рисунок 7).
Рисунок 7 Динамічна модель механізму
Iм – момент інерції моделі Mn – пусковий момент двигуна Mon – мемонт опору
Момент інерції Iм визначається за критерієм рівності кінетичних енергій моделі і реальної механічної системи
де ω - кутова швидкість моделі (ротора двигуна) Iд – момент інерції ротора Iтм - момент інерції тормозної муфти k1 - коефіцієнт урахування кінетичних енергій редуктора і зубчатої муфти mв - маса вантажу V - швидкість підйому вантажу k2 - коефіцієнт урахування кінетичних енергій троса і барабана
ω = ωд = 74,9 1/с Iд = 0,75 кг ∙ м2 Iтм = 0,62 кг ∙ м2 k1 = 1,25 — [ 1 ] — стор. 149 mв = 1000 ∙ Q = 8 ∙ 103 кг
Відповідно до (1)
Момент опору Mon знаходиться за умови, що його потужність є потужністю підйому вантажу
де ηмех – ККD механізму
Чисельно ηмех = ηn ∙ ηпр = 0,97 ∙ 0,93 = 0,9
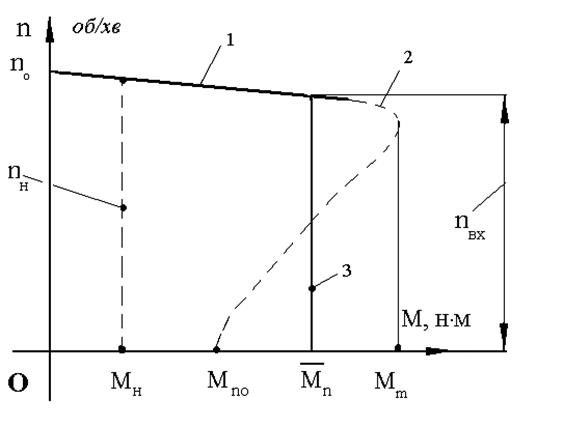
Пусковий момент двигуна можна визначити лінійною апроксимацією його механічної характеристики (рисунок 8). Йдеться про асинхронні двигуни з фазовим ротором серії МТН.
no = 750 об/хв (ωо = 78,5 1/с) nвх = 0,9no = 750 ∙ 0,9 = 675 об/хв. (ωвх =71 1/с) nн = 715 об/хв (ωн = 74,9 1/с) Мm = 900 Н ∙ м (за каталогом)
Мno ≥ 0,5Мm = 0,5 ∙ 900 = 450 Н ∙м Мn ≥ 0,7 Мm = 0,7 ∙ 900 = 630 Н ∙ м
Рисунок 8 Механічна характеристика двигуна
1- робоча гілка характеристики 2- пускова гілка 3- спрощена пускова гілка no – синхронні оберти (за хвилину) nн – номінальні оберти
Мн, Мno, Мm,- номінальний, початковий пусковий і максимальний моменти. Модель збудовано. За теоремою про зміну кінетичного моменту маємо
Проінтегруємо (5)
де tn – час пуску (виходу на робочу гілку механічної характеристики двигуна)
Звідси
Визначимо еквівалентний (з точки зору нагріву двигуна) момент, якщо час разового включення триває щонайменше 1,5 с (tвкл = 1,5 с), період циклу при ПВ 40% —
Це менше, ніж номінальний момент двигуна, а тому перегріву його не буде. До того ж, цей екстремальний режим малоймовірний. Висновок Механізми підйому вантажу є помірно інерційними механізмами, і для їх приводу доцільно застосовувати асинхронні двигуни з короткозамкненими роторами, з поліпшеною пусковою характеристикою. Такими є двигуни серії МАП для морських суден.
ЛІТЕРАТУРА
1. Иванченко Ф.К. Конструкция и расчёт подъёмно-транспортных машин. ¾ К.:Вища школа, 1988, 1993. 2. Камнєв Г.Ф., Кіпрський П.Р., Балін В.М. Підйомно-транспортні машини і палубні механізми, 1976. 3. Бройтман А.Н., Деревич В.А., Седар А.С. Суднові вантажопідйомні машинні устрої, 1964. 4. Рачков Е.В., Силиков Ю.В. Подъёмно-транспортные машины, 1984. 5. Александров М.П. Подъёмно-транспортные машины.¾ М.: Высшая школа, 1985. 6. Кіпрський Г.Р. Суднові крани і лебідки. Атлас конструкцій “Суднобудування”, 1976. 7. Іванов М.Н. Деталі машин.¾ М.: Вища школа, 1976. 8. В.И Анурьев. Справочник конструктора – машиностроителя. М.: «Машиностроение», 1982 9. Руденко Н.Ф., Алексондров М.П., Лисяков А.Г. Курсовое проектирование грузоподъёмных машин. М._Высшая школа, 1986.
Додаток 1
|
|||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-04-26; просмотров: 211; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.214 (0.01 с.) |


 (1)
(1) Рівняння (1) дає силу натягу каната
Рівняння (1) дає силу натягу каната







 де k3 – коефіцієнт запасу
де k3 – коефіцієнт запасу – ПВ двигуна за даними в каталозі
– ПВ двигуна за даними в каталозі

 Iм Mn
Iм Mn

 Mon
Mon (1)
(1) В нашому випадку ─ на прикладі двигуна МТН 412-8
В нашому випадку ─ на прикладі двигуна МТН 412-8 (2)
(2)

 (3)
(3) (4)
(4)

 Мn - середній пусковий момент
Мn - середній пусковий момент (5)
(5)
 Ім ∙ ωвх = (Мn - Мon) tn
Ім ∙ ωвх = (Мn - Мon) tn (6)
(6)

 (7)
(7)




