
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Выбор электродвигателя и Расчет электромеханических характеристикСодержание книги
Поиск на нашем сайте
Курсовая работа по дисциплине: Электромеханические преобразователи энергии на тему: Расчет регулируемого электропривода постоянного тока по схеме «тиристорный преобразователь – двигатель»
Специальность: Электроэнергетика Выполнила: Исламбакиева З. Группа Э-11-11 № зачетной книжки: 114281 Руководитель: профессор Мустафин М.А.
Алматы 2014 Содержание
Введение 3 Исходные данные 4 1 Выбор электродвигателя и расчет электромеханических характеристик 5 2 Расчет и выбор элементов силовой схемы 7 2.1 Расчет мощности и выбор силового трансформатора и вентилей преобразователя 7 2.2 Расчет индуктивности уравнительных и сглаживающих реакторов 7 2.3 Определение параметров привода и построение 8 3 Разработка функциональной схемы 10 3.1 Управляемый выпрямитель, как звено САУ 12 3.2 Пример расчета статических характеристик управляемого выпрямителя 13 3.3 Определение параметров обратных связей 15 3.4 Расчет и построение характеристик системы ТП-Д с отрицательной обратной связью по скорости и токовой отсечкой 16 Список литературы 19
Введение Основными функциональными задачами современного автоматизированного электропривода (АЭП) являются: - Управление процессами пуска, торможения, реверса (функции управления). Эту функцию могут выполнять разомкнутые системы АЭП. В процессе управления осуществляется грубый контроль за током. Жесткость механических характеристик хуже естественных. К настоящему моменту это самая распространенная группа АЭП. - Стабилизация заданной величины (ток, скорость, положение, мощность и т.д.) (функция стабилизации). Эту функцию может выполнить только замкнутая система АЭП. Основная регулируемая величина – та, по которой замыкается главная обратная связь. - Слежение за вводимыми в систему изменяющимися входными сигналами (функция слежения). Эта задача может быть выполнена только в замкнутых системах. Современная следящая система, как правило, трехконтурная. - Выбор целесообразных режимов работы АЭП (функция адаптации). Задача может быть выполнена в замкнутых системах. Кроме основных функций, система АЭП выполняет еще и дополнительные: - защита электродвигателя и оборудования от коротких замыканий, перегрузок по току, напряжению и т.д.; - блокировка, которая обеспечивает определенную последовательность операций и исключающая аварийные режимы; - сигнализация. В данной курсовой работе проводится расчет регулируемого электропривода постоянного тока по схеме "тиристорный преобразователь – двигатель" (ТП - Д), выполняющего стабилизацию частоты вращения и ограничение пусковых токов. Основной задачей выполнения курсовой работы является развитие навыков самостоятельной творческой работы и ознакомление с основными этапами проектирования.
Все расчеты и диаграммы выполнены с помощью программы Mathcad 14.
Исходные данные
Мощность P = 1 кВт; Скорость,n = 3000 об/мин; Диапазон регулирования скорости D = 6; Статическая ошибка Схема преобразователя 3-х фазная мостовая - Кu – коэффициент запаса по напряжению, учитывающий допускаемое по ПУЭ снижение напряжения сети, Кu=1,05; - Кa - коэффициент запаса, учитывающий неполное открытие вентиля при максимальном управляющем сигнале (для нереверсивных преобразователей принимают Кa=1, для реверсивных Кa=1,2); - КR - коэффициент, учитывающий падение напряжения при нагрузке в вентилях и обмотках трансформатора, а также наличие угла коммутации (можно принимать КR=1,05). - Ki - коэффициент, учитывающий отклонение формы тока от прямоугольной (по опытным данным Ki=1,05…1,1); - KT2 – коэффициент, представляющий собой отношение действующего значения соответствующего фазного тока к выпрямленному току, KT2=0,815; - КН- коэффициент схемы (в нашем случае КН=0,427); - КТ1=0,817; Кu.max=1.05; КМ=1,045; Uном=220 В; ηн=0,92.
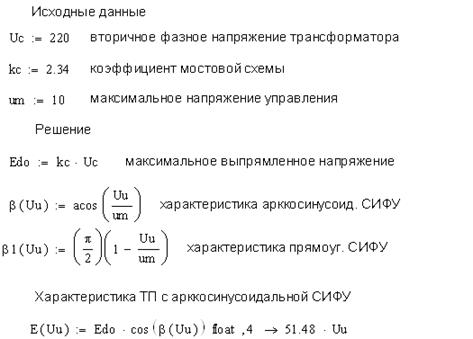
РАСЧЕТ И ВЫБОР ЭЛЕМЕНТОВ СИЛОВОЙ СХЕМЫ ПРИМЕР РАСЧЕТА СТАТИЧЕСКИХ ХАРАКТЕРИСТИК УПРАВЛЯЕМОГО ВЫПРЯМИТЕЛЯ Исходные данные: Преобразователь собран по мостовой схеме, kсх =2,34. Uс = 220 B – фазное напряжение вентильной обмотки трансформатора; UУmax = 10 В – принятое максимальное значение напряжения управления. При арккосинусоидальной характеристике СИФУ угол регулирования инвертора
При линейной характеристике СИФУ угол регулирования инвертора равен
ЭДС выпрямителя при мостовой схеме ТП
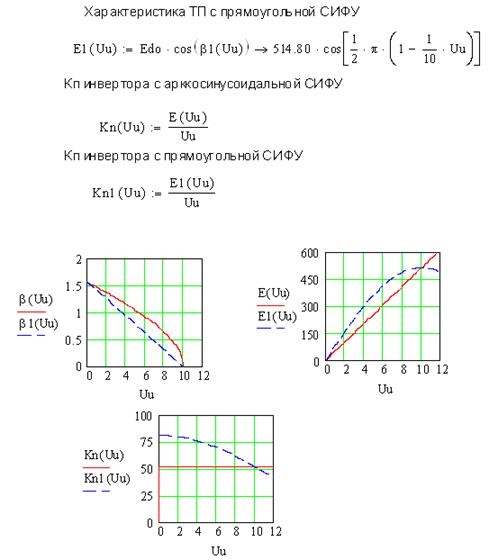
Для определения коэффициента усиления инвертора при различных вариантах СИФУ в соответствии с формулами (39), (40), (41) можно использовать программу расчета, выполненную с применением приложения "Mathcad". Индексом «1» отмечен вариант линейной СИФУ.
Рисунок 7 – Расчет статических характеристик управляемого выпрямителя На рисунке 7 представлены результаты расчета регулировочных характеристик СИФУ (a), преобразователя (b) и коэффициента передачи выпрямителя (c). Сплошной линией на рисунках отмечены характеристики выпрямителя при арккосинуидальной СИФУ, пунктирной – при линейной СИФУ. В первом случае kп – величина постоянная, во втором – изменяется в диапазоне регулирования. Для дальнейших расчетов можно задаться областью регулирования ЭДС выпрямителя для конкретного механизма и определить соответствующее ей значение kп. Курсовая работа по дисциплине: Электромеханические преобразователи энергии на тему: Расчет регулируемого электропривода постоянного тока по схеме «тиристорный преобразователь – двигатель»
Специальность: Электроэнергетика Выполнила: Исламбакиева З. Группа Э-11-11 № зачетной книжки: 114281 Руководитель: профессор Мустафин М.А.
Алматы 2014 Содержание
Введение 3 Исходные данные 4 1 Выбор электродвигателя и расчет электромеханических характеристик 5 2 Расчет и выбор элементов силовой схемы 7 2.1 Расчет мощности и выбор силового трансформатора и вентилей преобразователя 7 2.2 Расчет индуктивности уравнительных и сглаживающих реакторов 7 2.3 Определение параметров привода и построение 8 3 Разработка функциональной схемы 10 3.1 Управляемый выпрямитель, как звено САУ 12 3.2 Пример расчета статических характеристик управляемого выпрямителя 13 3.3 Определение параметров обратных связей 15 3.4 Расчет и построение характеристик системы ТП-Д с отрицательной обратной связью по скорости и токовой отсечкой 16 Список литературы 19
Введение Основными функциональными задачами современного автоматизированного электропривода (АЭП) являются: - Управление процессами пуска, торможения, реверса (функции управления). Эту функцию могут выполнять разомкнутые системы АЭП. В процессе управления осуществляется грубый контроль за током. Жесткость механических характеристик хуже естественных. К настоящему моменту это самая распространенная группа АЭП. - Стабилизация заданной величины (ток, скорость, положение, мощность и т.д.) (функция стабилизации). Эту функцию может выполнить только замкнутая система АЭП. Основная регулируемая величина – та, по которой замыкается главная обратная связь. - Слежение за вводимыми в систему изменяющимися входными сигналами (функция слежения). Эта задача может быть выполнена только в замкнутых системах. Современная следящая система, как правило, трехконтурная. - Выбор целесообразных режимов работы АЭП (функция адаптации). Задача может быть выполнена в замкнутых системах. Кроме основных функций, система АЭП выполняет еще и дополнительные: - защита электродвигателя и оборудования от коротких замыканий, перегрузок по току, напряжению и т.д.; - блокировка, которая обеспечивает определенную последовательность операций и исключающая аварийные режимы; - сигнализация. В данной курсовой работе проводится расчет регулируемого электропривода постоянного тока по схеме "тиристорный преобразователь – двигатель" (ТП - Д), выполняющего стабилизацию частоты вращения и ограничение пусковых токов. Основной задачей выполнения курсовой работы является развитие навыков самостоятельной творческой работы и ознакомление с основными этапами проектирования.
Все расчеты и диаграммы выполнены с помощью программы Mathcad 14.
Исходные данные
Мощность P = 1 кВт; Скорость,n = 3000 об/мин; Диапазон регулирования скорости D = 6; Статическая ошибка Схема преобразователя 3-х фазная мостовая - Кu – коэффициент запаса по напряжению, учитывающий допускаемое по ПУЭ снижение напряжения сети, Кu=1,05; - Кa - коэффициент запаса, учитывающий неполное открытие вентиля при максимальном управляющем сигнале (для нереверсивных преобразователей принимают Кa=1, для реверсивных Кa=1,2); - КR - коэффициент, учитывающий падение напряжения при нагрузке в вентилях и обмотках трансформатора, а также наличие угла коммутации (можно принимать КR=1,05). - Ki - коэффициент, учитывающий отклонение формы тока от прямоугольной (по опытным данным Ki=1,05…1,1); - KT2 – коэффициент, представляющий собой отношение действующего значения соответствующего фазного тока к выпрямленному току, KT2=0,815; - КН- коэффициент схемы (в нашем случае КН=0,427); - КТ1=0,817; Кu.max=1.05; КМ=1,045; Uном=220 В; ηн=0,92.
ВЫБОР ЭЛЕКТРОДВИГАТЕЛЯ И РАСЧЕТ ЭЛЕКТРОМЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК
1. Определим номинальную угловую частоту вращения двигателя (рад/с)
2. Определим номинальный момент двигателя (
3. Определим сопротивление якоря (Ом)
4. Определим параметр
5. Определяем скорость идеального Х.Х.
6. Строим электромеханическую характеристику по точкам: Для построения естественной электромеханической характеристики двигателя постоянного тока независимого возбуждения по уравнению
достаточно знать координаты двух ее точек: номинального режима с координатами Характеристика строится по точкам номинальной нагрузки
7. Определим минимальную скорость при номинальной нагрузке
8. Определим напряжение якоря при
Рисунок 1 - Трёхфазная мостовая схема
|
||||||||||||
|
|
Последнее изменение этой страницы: 2016-04-23; просмотров: 382; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.17.181.122 (0.008 с.) |


 = 8 %;
= 8 %; (39)
(39) (40)
(40) (41)
(41)

 (1)
(1) )
)
 (3)
(3) (
( )
) (4)
(4) (5)
(5) (6)
(6) ,
,  и режима холостого хода с координатами
и режима холостого хода с координатами  ,
,  .
. ,
,  и режима холостого хода с координатами
и режима холостого хода с координатами ,
,  = 65,49 рад/с (7)
= 65,49 рад/с (7) (8)
(8) (9)
(9)



