Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Основні характеристики системи селекції рухомих цілей (СРЦ)Содержание книги
Поиск на нашем сайте
До основних характеристик будь-якої системи СРЦ відносяться: 1. Швидкісна характеристика, що є залежністю коефіцієнта передачі корисного сигналу по потужності Р с вых/ Р с вх від радіальної швидкості (частоти Доплера) К с Р = f (V r) або K с Р = f (F д), тобто
де Рс вх, Р с вых - потужність корисного сигналу на вході і виході системи відповідно. Якість проходження корисного сигналу через систему СРЦ визначається коефіцієнтом передачі корисного сигналу. Швидкісна характеристика системи СРЦ залежить від кратності віднімання сигналів, яка визначається числом послідовно включених пристроїв ЧПК. 2. Якість придушення пасивних перешкод визначається коефіцієнтом її придушення
де Р пп вх, Р пп вых - потужність пасивних перешкод на вході і виході системи СРЦ відповідно. 3. Як загальний показник ефективності системи СРЦ можна використовувати коефіцієнт поліпшення відношення сигнал-перешкода
який показує, в скільки разів відношення сигнал/перешкода на виході СРЦ більше відношення сигнал/перешкода на її вході. 4. Коефіцієнт підперешкодової видимості К пв є відношення, що показує наскільки середня потужність сигналу від цілі Р Свх на вході приймача може бути слабкішим інтенсивності пасивної перешкоди Р Пвх на вході приймача, при якому забезпечується виявлення сигналу із заданою вірогідністю правильного виявлення D = D зад і помилкової тривоги F = Fзад. Вірогідність правильного виявлення і помилкової тривоги звичайно вибирає рівними D = 0,5 і D = 0,8, F = 10-6. К пв = Р пвх/ Р свх │ D = D зад, │ F = F зад Виходячи з цього визначення витікає, що K пв характеризує здатність РЛС знаходити сигнал на фоні інтенсивних пасивних перешкод. Цей параметр залежить не тільки від характеристик режекторних фільтрів, але і від використовуваного алгоритму виявлення. 5. k L - коефіцієнт зміни втрат при включенні системи СРЦ. Числове значення k Lзалежить від технічної реалізації пристроїв ЧПК і складає в середньому 3-5 дБ. Остання цифра відноситься до систем СРЦ, у яких пристрій ЧПК виконаний на потенціалоскопах. Якщо в системі СРЦ на відеочастоті використовується тільки один канал (без розділення на канали квадратури), то коефіцієнт втрат k Lдодатково збільшується на 2 дБ. 13. Структурна схема пристрою системи селекції рухомих цілей (СРЦ) з еквівалентною внутрішньою когерентністю з черезперіодним відніманням (ЧПВ) на відео частоті (рис. 4.44) Схема призначена для компенсації пасивної перешкоди. У цій схемі на фазовий детектор (ФД) подається напруга з виходу ППЧ приймального пристрою РЛС і опорна напруга, яка формується когерентним гетеродином. Частота когерентного гетеродина в пристроях СРЦ з черезперіодним відніманням (ЧПВ) на відеочастоті рівна частоті сигналу, тобто проміжній частоті приймального пристрою. Амплітуда і полярність вихідних сигналів ФД визначається амплітудою вхідних сигналів і різницею фаз сигналу (перешкоди) і опорної когерентної напруги. Якщо початкова фаза сигналу (перешкоди) залишається незмінною від періоду до періоду ΏД = 0 (частота Доплера рівна нулю), то послідовність імпульсів на виході ФД матиме постійну амплітуду. Якщо ж сигнал (перешкода) має регулярну межперіодноє зміну фази Δφ = ΏД T П, то послідовність імпульсів на виході ФД буде промодульована частотою пульсацій F пульс = F Д − kF П, де k − [ F Д/ F П] −ціла частина відношення. Якщо послідовність імпульсів подати на входи схеми віднімання: на один вхід безпосередньо, а на інший - через лінію затримки на період проходження, то перешкода поточного періоду проходження компенсуватиметься затриманою перешкодою попереднього періоду проходження. 14. Структурна схема пристрою системи селекції рухомих цілей (СРЦ) з зовнішньою когерентністю з черезперіодним відніманням (ЧПВ) на відеочастоті (рис. 4.46) Схема призначена для компенсації пасивної перешкоди. Структурна схема пристрою СРЦ із зовнішньою когерентністю з ЧПВ на відеочастоті показана на рис.4.46. Її відмінність від пристрою СРЦ з еквівалентною внутрішньою когерентністю полягає у тому, що когерентний гетеродин фазується не зондуючим імпульсом, а прийнятим перешкодовим коливанням. При такому фазуванні в когерентну напругу вводиться як випадкова початкова фаза сигналу φi так і регулярна зміна фаз перешкоди ΏДС Т П, обумовлене переміщенням хмари відбивачів під дією вітру. При цьому відпадає необхідність в СКДВ, що є істотною гідністю пристроїв СРЦ із зовнішньою когерентністю. Проте коефіцієнт придушення перешкоди в такому пристрої буде нижчим, ніж в пристрої СРЦ з внутрішньою когерентністю. Це обумовлено тим, що в пристрої СРЦ із зовнішньою когерентністю в когерентну напругу вводяться всі випадкові флюктуації фази перешкоди, через що флюктуації амплітуди перешкоди на виході ФД зростають і її спектр розширяється. Крім того, в такому пристрої мають місце передні кромки перешкоди, що не компенсуються, а роздільна здатність РЛС по дальності погіршується в два рази, оскільки для виключення компенсації корисного сигналу в ланцюг фазування когерентного гетеродина вводиться затримка приблизно на тривалість імпульсу τи. В результаті коли початкова частина напруги перешкоди поступає на вхід ФД, когерентний гетеродин ще не збалансований, унаслідок чого передня кромка на виході ФД флюктує по амплітуді від періоду до періоду проходження і не компенсується в схемі ЧПВ. 15. Принципова схема обмежувача сигналів системи селекції рухомих цілей (СРЦ) (рис. 4.47) Обмежувач встановлюється між ППЧ і ФД. Застосування обмежувача дозволяє усунути паразитну амплітудну модуляцію сигналу, яка може виникнути при проходженні сигналу у високочастотному тракті приймача РЛС. Основна вимога до ФД зводиться до того, щоб напруга на його виході залежала тільки від фазового зрушення Обмежувач забезпечує узгодження динамічного діапазону ППЧ (по виходу) з динамічним діапазоном елементів системи СРЦ. Крім того, за допомогою обмежувача можна забезпечити нормування залишків пасивної перешкоди (ПП), що не компенсуються, до рівня власних шумів приймача. На рис.4.47,а представлена принципова схема обмежувача на послідовно включених діодах. Опір R1 повинен бути значно більше опорів резисторів R2 і R3. При великих рівнях вхідних сигналів обмежувачу цього типу властиві недоліки, обумовлені накопиченням зарядів. Застосування діодів на «гарячих» носіях дозволяє поліпшити цей хороший в інших відносинах обмежувач. На рис.4.47,б представлений транзисторний обмежувач. Він має високу фазову стабільність. Підвищення якісних характеристик подібного обмежувача можна забезпечити за рахунок використовування декількох послідовно включених транзисторів, що працюють в режимі обмеження. 16. Принципова схема фазового детектора системи селекції рухомих цілей (СРЦ) (рис. 4.49) Основними вимогами до ФД в системах СРЦ є: − перенесення спектру вхідних сигналів в область відеочастот без його розширення; − достатньо великий динамічний діапазон. ФД можуть бути небалансними і балансними. Балансний ФД найбільшою мірою відповідає вимогам, які пред'являються до ФД в системах СРЦ на відеочастоті. Його динамічний діапазон значно вище за динамічний діапазон небалансного ФД через відсутність необхідності виконання умови Uоп >> Uс. Якнайкращі характеристики серед ФД має кільцевою ФД (рис.4.49). Він складається з діодного моста, вхідного та вихідного трансформатора, R-C ланцюга. 17. Структурна схема пристрою формування опорної напруги (ПФОН) (рис. 4.50) Пристрій формування опорної напруги (ПФОН) повинен забезпечувати: − виключення випадкової початкової фази зондуючих імпульсів при перенесенні спектрів відображених сигналів в область відеочастот (для виконання цієї вимоги початкова фаза опорної напруги f оп повинна бути рівна випадковій початковій фазі зондуючого імпульсу f сл.з); − можливість придушення сигналів, відображених від джерел ПП, що переміщаються під дією вітру (компенсацію швидкості вітру). Для виконання цієї умови необхідно, щоб доплерівський зсув частоти віддзеркалень від ПП Δ F Дпп = 0. Структурна схема ПФОН для РЛС з автогенератором представлена на рис.4.50. Перша вимога до ПФОН в РЛС з автогенератором виконується шляхом нав'язування когерентному гетеродину (КГ) випадкової початкової фази зондуючого сигналу у момент випромінювання останнього. Процес нав'язування фази називають фазуванням КГ. Когерентний гетеродин працює на проміжній частоті. Тому сигнал фазування одержують, змішуючи ослаблений вихідний сигнал в змішувачі каналу фазування. Для виконання другої вимоги між КГ і входом ФД включають схему компенсації дії вітру (СКДВ). Ця схема забезпечує зсув частоти КГ на необхідну доплерівську поправку. До складу ПФОН входять: антенний перемикач, ПВЧ, генератор СВЧ, направлений відгалужувач, 2-а змішувачі, місцевий гетеродин, 2-а ППЧ, каскад фазування, на який подаються стробуючі імпульси, когерентний гетеродин, СКДВ, фазовий детектор, з якого сформована напруга подається на ЧПК. 18. Пристрій черезперіодної компенсації (ЧПК) з однократним та двократним відніманням (рис. 4.53) Пристрій призначений для компенсації пасивної перешкоди. У аналогових системах СДЦ пристрою черезперіодного віднімання (ЧПВ) або черезперіодної компенсації (ЧПК) можуть бути реалізовані на віднімаючих потенціалоскопах і на ультразвукових лініях затримки (УЛЗ). Еквівалентні структурні схеми таких ЧПВ з одноразовим і двократним відніманням представлені на рис.4.53. До складу пристроїв входять: лінії затримки та віднімаючі потенціалоскопи (схема віднімання). Якщо послідовність імпульсів подати на входи схеми віднімання: на один вхід безпосередньо, а на інший - через лінію затримки на період проходження, то перешкода поточного періоду проходження компенсуватиметься затриманою перешкодою попереднього періоду проходження. 19. Пристрій черезперіодної компенсації (ЧПК) на ультразвукових лініях затримки (УЛЗ) (рис. 4.54) Пристрій призначений для компенсації пасивної перешкоди. Особливості технічної реалізації пристроїв ЧПК на ультразвукових лініях затримки (УЛЗ). Швидкість розповсюдження звуку значно менше швидкості світла, що дозволяє реалізувати достатньо великий час затримки при прийнятних розмірах лінії. Структурна схема пристрою ЧПК на УЛЗ показана на рис.4.54. У УЛЗ електромагнітна енергія перетвориться в енергію ультразвукових коливань за допомогою вхідного п'єзоелектричного перетворювача (кристали кварцу, титанату барію і т.д.). Вихідний перетворювач здійснює зворотне перетворення. Як звукопровід можуть застосовуватися: ртуть, вода, плавлений кварц, монокристали солей NaCl, KCl, BaF 2 і ін. Для зменшення габаритів в ній використовують багатократні віддзеркалення. 20. Пристрій черезперіодної компенсації (ЧПК) на потенціалоскопах (рис. 4.60) Пристрій призначений для компенсації пасивної перешкоди. До складу пристрою ЧПК входять (рис.4.60): − віднімаючий потенціалоскоп − пристрій розділення вхідних і вихідних сигналів, включаюче фільтр-пробку і контур навантаження; − модулюючий гетеродин; − синхронний детектор; − підсилювачі вхідних і вихідних сигналів; − генератор спіральної розгортки. 21. Будова віднімаючого потенціалоскопа (рис. 4.58) Віднімаючий потенціалоскоп (ВП) є електронно-променевою трубкою з електростатичним фокусуванням і електромагнітним управлінням променем (рис.4.58). Вхідні сигнали подаються на сигнальну пластину і записуються на діелектричній мішені у вигляді потенційного рельєфу. Мішень виконана з матеріалу з високим поверхневим опором, що виключає розтікання зарядів по мішені, і з коефіцієнтом вторинної емісії k эм більшим одиниці. Колектор знаходиться під позитивним потенціалом щодо мішені і створює для вторинних електронів, що пройшли бар'єрну сітку, прискорююче поле. Процеси в потенціалоскопі за відсутності вхідних сигналів: первинний потік електронів, створюваний електронною гарматою, потрапляючи на ділянку мішені, вибиває з нього вторинні електрони, число яких завжди більше первинних (k эм > 1). Оскільки поле в просторі мішень-бар’єрна сітка в початковий момент відсутнє, майже всі електрони потраплять на колектор, і вторинний струм буде більше первинного. Це приведе до того, що ділянка мішені заряджатиметься позитивно. У міру збільшення потенціалу мішені наростає гальмуюче поле для вторинних електронів і число тих з них, які можуть піти до колектора, зменшується. Процес продовжуватиметься до тих пір, поки на мішені не встановиться рівноважний потенціал U р, при якому кількість електронів, що приходять на мішень, рівно кількості електронів, які пішли з мішені до колектора. При подачі на сигнальну пластину вхідного сигналу позитивної полярності гальмуюче поле в просторі мішень-бар’єрна сітка зростає і кількість вторинних електронів, які можуть піти до колектора, зменшується. Потенціал мішені починає також зменшуватися, що приводить до зменшення гальмуючого поля і збільшення вторинного струму до тих пір, поки знов не встановиться режим динамічної рівноваги. При подачі на сигнальну пластину негативних вхідних сигналів вторинний струм спочатку зростає, а потім починає убувати до значення первинного струму. Потенціал мішені при цьому підвищуватиметься. Для запису всіх відображених сигналів в даному періоді повторення виробляється розгортання електронного променя по мішені. Для цього використовується спіральна розгортка, створювана за допомогою відхилюючої системи, живленої від спеціального генератора. 22. Структурна схема одно і двоканального черезперіодного автокомпенсатора (ЧПАК) на радіочастоті (рис. 4.62) Схема призначена для компенсації пасивної перешкоди. Системи СДЦ на базі автокомпенсаторів, відомі під назвою черезперіодні автокомпенсатори (ЧПАК), є різновидом систем СРЦ із зовнішньою когерентністю. Режекція спектральних становлячих сигналів пасивних перешкод в таких системах може здійснюватися як на відеочастоті, так і на радіочастоті. На рис.4.62 представлені структурні схеми одноканальної і двохканальної ЧПАК на радіочастоті. Поняття кратності віднімання ЧПК для ЧПАК трансформується в поняття канальності, тобто числа додаткових каналів (ліній затримки на Тп). Робоча частота УЛЗ в даному випадку рівна проміжній частоті (ПЧ), тому відпадає необхідність використовування модулюючого гетеродина і модулятора для забезпечення нормальної роботи УЛЗ. Одним з основних елементів ЧПАК є автокомпенсатор. Він є самоналагоджувальним пристроєм з кореляційними зворотними зв'язками, забезпечуючий виключення із спектру сигналів перешкод в основному каналі АК складових, корельованих з сигналами перешкод в додаткових каналах АК. Основним каналом АК називають канал, в якому відсутній підсилювач з регульованим коефіцієнтом передачі, а додаткові – канали з регульованими коефіцієнтами передачі. 23. Структурна схема квадратурного автокомпенсатора (АК) (рис. 4.65) Схема призначена для компенсації пасивної перешкоди. Одним з основних елементів ЧПАК є автокомпенсатор. Він є самоналагоджувальним пристроєм з кореляційними зворотними зв'язками, забезпечуючий виключення із спектру сигналів перешкод в основному каналі АК складових, корельованих з сигналами перешкод в додаткових каналах АК. Основним каналом АК називають канал, в якому відсутній підсилювач з регульованим коефіцієнтом передачі, а додаткові – канали з регульованими коефіцієнтами передачі. Підсилювач з регульованим коефіцієнтом передачі може бути реалізований з допомогою: − двох каналів квадратури з регульованими: коефіцієнтами посилення і фазовим зрушенням між каналами π/2 радіан; − керованого змішувача частоти. У першому випадку АК називається квадратурним (рис.4.65). Роль кореляторів в квадратурному АК виконують ФД і інтегратори (найчастіше на базі операційних підсилювачів). Балансні підсилювачі (БП) в квадратурному АК крім зміни амплітуди вхідних сигналів додаткових каналів забезпечують їх проходження до суматора або без зміни фази, або із зміною її на π радіан. Значення фазового зрушення (0 або π радіан) визначається полярністю напруги на виході ФД. При використовуванні інтегральних мікросхем перевага в цьому відношенні має квадратурний АК. 24. Структурна схема гетеродинного автокомпенсатора (АК) (рис. 4.66) Схема призначена для компенсації пасивної перешкоди. Одним з основних елементів ЧПАК є автокомпенсатор. Він є самоналагоджувальним пристроєм з кореляційними зворотними зв'язками, забезпечуючий виключення із спектру сигналів перешкод в основному каналі АК складових, корельованих з сигналами перешкод в додаткових каналах АК. Основним каналом АК називають канал, в якому відсутній підсилювач з регульованим коефіцієнтом передачі, а додаткові – канали з регульованими коефіцієнтами передачі. Підсилювач з регульованим коефіцієнтом передачі може бути реалізований з допомогою: − двох каналів квадратури з регульованими: коефіцієнтами посилення і фазовим зрушенням між каналами π/2 радіан; − керованого змішувача частоти. У другому випадку АК називається гетеродинним (рис. 4.66). Роль кореляторів в гетеродинних АК виконують змішувач СМ2 і вузькосмуговий фільтр. 25. Схеми включення черезперіодного автокомпенсатора (ЧПАК) (рис. 4.68, 4.69) Схеми призначені для компенсації пасивної перешкоди. Від способу включення АК і лінії затримки залежить швидкісна характеристика авто компенсатора. Швидкісна характеристика - це залежність коефіцієнта передачі корисного сигналу по потужності від радіальної швидкості цілі (частоти Доплера): K ср = P Свых/ P Свх = f (V r) = f (F Д) При одношаровій ПП співвідношення для коефіцієнтів передачі корисного сигналу мають вигляд: 1) для одноканальної ЧПАК K ср1(F Д) = 1 + R 2(Т п) − 2∙ Т п∙cos 2π∙(F Д − F Дпп). 2) для двохканальної симетричної ЧПАК (рис.4.69)
Для схеми включення несиметричної двоканальної ЧПАК (рис.4.68), яка може бути одержана з симетричної перемиканням місця входу сигналу, вираз для K срН(F Д) складніший. Середнє значення цих коефіцієнтів при R (Т п) ≈ 1 наступне: K ср1 ≈ 2; K срС ≈ 1,5; K срН ≈ 6. 26. Системи обробки з фільтровою системою СРЦ (рис. 4.71) Схеми призначені для компенсації пасивної перешкоди. Фільтрові системи СРЦ використовуються при високих вимогах до перешкодозахисної РЛС в умовах ПП. В цьому випадку РЛС, як правило, працює в режимі істинної внутрішньої когерентності і система СРЦ є режекторним фільтром (РФ) з АЧХ вигляду K рф(f) = С 1/[ N о + N пп(f)], де С 1 - постійний коефіцієнт, N пп(f) та N о - спектральна густина потужності пасивних перешкод і внутрішнього шуму приймача. Така характеристика називається гребінчастою, а РФ - гребінчастим фільтром придушення (ГФП) (рис.4.70). Структура системи обробки сигналів з фільтровою СРЦ визначається способом накопичення відображених сигналів як найважливішого етапу оптимальної фільтрації. При некогерентному накопиченні вона має вигляд, представлений на рис.4.71,а, при когерентному - на рис.4.71,б. При когерентному накопиченні відображених сигналів, принципова можливість якого з'являється у разі використовування істинної когерентності, роль ГФП можуть виконувати пристрої нормування сигналів швидкісних каналів з коефіцієнтом передачі K i = 1/ P ПП вых (тут P ППвыхi − потужність сигналів ПП на виході i -го швидкісного каналу). Як такі пристрої можуть застосовуватися схеми ШАРП. Використовування пристроїв нормування виключає необхідність застосування систем компенсації дії вітру (СКДВ). Некогерентне накопичення використовується з метою спрощення технічної реалізації системи обробки у разі, коли немає необхідності у використовуванні інформації про швидкість. 27. Системи обробки з цифровою системою СРЦ (рис. 4.79) Схеми призначені для компенсації пасивної перешкоди. У цифрових системах СРЦ якнайповніші виявляються переваги цифрових методів і пристроїв обробки радіолокаційних сигналів. Їх принциповою відмінністю від звичних систем СРЦ є цифрова реалізація гребінчастого фільтру придушення (рис.4.79). Коефіцієнт придушення ПП, реалізовуваний в цифрових системах СРЦ, визначається співвідношенням К ППр = (К -1ПП пред + К -1ПП АЦП + S К -1ПП i,)-1, де К ПП пред − гранично досяжний коефіцієнт придушення ПП для заданих структури цифрового гребінчастого фільтру придушення(ЦГФП), параметрів ПП і динамічного діапазону тракту до АЦП; КПП АЦП ≈ 10 -0,6m (тут m - розрядність АЦП); К ПП i − коефіцієнт придушення, обумовлений нестабільністю i -го функціонального вузла РЛС (генератора СВЧ, місцевого і когерентного гетеродинів). Цифрові ГФП можуть обробляти сигнали в тимчасовій або частотній областях. У першому випадку ЦГФП є еквівалентом аналогових пристроїв ЧПК, відповідної кратності (із зворотними зв'язками або без них), а в другому - набору доплерівськіх фільтрів кореляційно-фільтрових систем СРЦ. Цифрові ГФП можуть бути виконані по рекурсивній і нерекурсивній схемах. 28. Пристрій дискретизації аналогових сигналів (рис. 5.4) Для забезпечення роботи цифрових пристроїв обробки необхідно, як наголошувалося вище, перетворити аналоговий сигнал в цифрову форму. Ця процедура в більшості випадків включає три самостійні операції: дискретизацію, квантування і кодування. Дискретизація аналогового сигналу U(t) полягає у вимірюванні (відліку) його значень в дискретні моменти часу, віддалені один від одного на інтервал Т Д, званий періодом дискретизації. В результаті сигнал U(t) перетвориться в послідовність значень { U(t п ) } в моменти часу t п = nT Д, n = 0, 1, 2 Пристрій дискретизації в простому випадку є стробованим каскадом (ключ), що відкривається на час τд з періодом Т Д, що задовольняє умові
де f макс − максимальна (гранична) частота в спектрі вхідного сигналу. Максимальний інтервал тимчасової дискретизації визначається відповідно до теореми Котельникова. При внутріперіодній цифровій обробці (фільтрації) сигналу дискретизацію доцільно виконувати на відеочастоті, шуканий інтервал повинен бути зворотньопропорційний ширині спектру модуляції зондуючого сигналу
Ця умова виконується при t д < Т Д і його реалізація у разі використовування простого дискретизатора пов'язана з необхідністю істотного збільшення швидкодії АЦП і широкосмуговості пристроїв формування імпульсів дискретизації. Вимогу до швидкодії АЦП можна понизити, якщо між дискретизатором і АЦП включити пристрій фіксації вихідної напруги ключа (наприклад, конденсатор). Проте вимога до широкосмугової пристрою формування імпульсів дискретизації зберігається. Тому на практиці як дискретизатор найчастіше використовується схема стеження і запам'ятовування вхідних сигналів, показана на рис.5.4. У цій схемі ключ, виконаний на МОП-транзисторі, на нього подаються імпульси дискретизації (управління) з тривалістю τд сумірною з Т Д (звично τд ≈ Т Д /2). На конденсаторі Із запам'ятовується значення вхідного сигналу, відповідне моменту закінчення імпульсу управління, на якийсь час, рівне Т Д - τд. Спектр дискретизованого сигналу є періодичним і є послідовністю спектрів вхідного сигналу, зсунутих один щодо іншого на величину F Д = 1/ Т Д. 29. Пристрій квантування, його характеристика (рис. 5.5) Для забезпечення роботи цифрових пристроїв обробки необхідно, як наголошувалося вище, перетворити аналоговий сигнал в цифрову форму. Ця процедура в більшості випадків включає три самостійні операції: дискретизацію, квантування і кодування. Квантування - це перетворення аналогових значень сигналу в дискретну форму U кв(t п) шляхом дискретизації сигналів по амплітуді (по фазі). Після квантування сигнал кодується. Найчастіші операції квантування і кодування поєднуються і виконуються в АЦП. Пристрій квантування є нелінійним елементом з амплітудною характеристикою, зображеною на рис.5.5. Інтервал hi зміни амплітуди вхідного сигналу між рівнями Ui і Ui+1 називається інтервалом або кроком квантування. Квантування може бути рівномірним (hi = const) або адаптивним (hi = var). Найбільше застосування знайшло рівномірне квантування. Як видно з рис.5.5, значенням вхідного сигналу, лежачим усередині інтервалу h i, відповідає одне значення вихідного сигналу U квi. Це приводить до помилок квантування, які оцінюються різницею між аналоговими і квантованими значеннями сигналів l (n) = U (n) − U кв(n). У загальному випадку значення цієї різниці носить випадковий характер, тому її називають шумом квантування. Амплітудний розподіл шуму квантування залежить від того, який спосіб наближення використовується при квантуванні: округлення або усікання. При округленні вихідні рівні вибираються рівними середині інтервалів: U квi = (U i + U i+1)/2, а при усіканні - найближчим меншим рівнем квантування. Дисперсія шуму квантування для обох випадків однакова і складає: σ2кв = h 2/12 (при рівномірному квантуванні). Для зменшення шуму квантування необхідно зменшити крок квантування. При заданій динамічній дисперсії вхідного сигналу це можна здійснити шляхом збільшення числа рівнів квантування, визначуваного при рівномірному квантуванні
Число рівнів в свою чергу визначає розрядність перетворення.
30. Послідовний аналого-цифровий пристрій (АЦП) (рис. 5.6) За способом перетворення вибіркових значень сигналу в цифровий еквівалент АЦП зведені в три класи: послідовні; паралельні і послідовно-паралельні. Принцип дії послідовних АЦП заснований на процедурі послідовного наближення цифрового еквівалента до перетворюваної величини, яка може бути реалізована за допомогою одиничних або двійково - зважених наближень (рис.5.6 і 5.7 відповідно). Час перетворення в такій АЦП є змінним і залежить від величини вхідного сигналу. Його максимальне значення t пр.макс = (2m – 1) T сч, де T сч - період проходження рахункових імпульсів. При великому числі розрядів швидкодія таких АЦП мало при m = 10 і T сч = 1 мкс (1 Мгц), t пр.= 1024 мкс, що забезпечує максимальну частоту дискретизації F Дмакс ≈ 1 кГц. При використовуванні АЦП з двійково-зваженим наближенням (порозрядним кодуванням) швидкодія може бути істотно підвищене. У основу його роботи встановлений принцип послідовного порівняння зміряної величини з 1/2, 1/4, 1/8 і т.д. від можливого її максимального значення (принцип дихотомії). Виграш в швидкодії в порівнянні з АЦП з одиничним наближенням рівний приблизно 2m/ m і досягає при m ≥ 10 двох і більш порядків. Частота дискретизації в АЦП з порозрядним кодуванням складає одиниці мегагерц. 31. Паралельний аналого-цифровий пристрій (АЦП) (рис. 5.8) За способом перетворення вибіркових значень сигналу в цифровий еквівалент АЦП зведені в три класи: послідовні; паралельні і послідовно-паралельні. Принцип дії паралельних АЦП заснований на одночасному квантуванні сигналу за допомогою набору компараторів. Число компараторів рівне 2 m – 1, де m - число розрядів, а порогові рівні встановлюються за допомогою резістівного дільника, підключеного до джерела опорної напруги, відповідно до використовуваної шкали квантування. Структурна схема трьохрозрядного паралельного АЦП представлена на рис.5.8. При подачі вхідного сигналу спрацьовують всі ті компаратори, у яких поріг менше, ніж вхідний сигнал. Унітарний код, що виходить при цьому, за допомогою кодуючої логіки перетвориться в двійковий. Головною гідністю паралельних АЦП є їх висока швидкодія. Частота перетворення досягає 100-200 Мгц. Проте їх об'єм приблизно подвоюється з кожним новим розрядом. Тому розрядність таких АЦП не перевищує 10-12. 32. Логічний виявляч радіолокаційних сигналів (рис. 5.11) Алгоритм оптимального виявлення пачки бінарно-квантованих сигналів представляється у вигляді
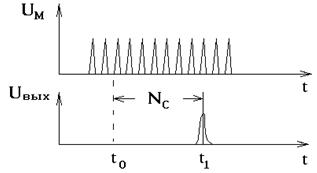
де x i - значення сигналу (0 або 1) на i -ой позиції пачки; n i - ваговий коефіцієнт, залежний від значень вірогідності отримання нулів і одиниць на i -ій позиції пачки; М - число імпульсів в пачці (число позицій). Послідовність коефіцієнтів ni називають ваговою функцією виявлення. З формули видно, що виявлення пачки зводиться до підсумовування значень вагової функції на тих позиціях, де x i = 1, і порівнянню результату підсумовування з порогом С, при перевищенні якого видається рішення про виявлення. У зв'язку з цим пристрій, що реалізовує алгоритм, називають ваговим бінарним виявлячем. Логічний виявляч k з М. Виявляч, який по своїй ефективності еквівалентний виявлячу рухомого вікна, може бути виконаний на основі логічних схем (рис.5.11). Принцип його дії заснований на тому, що рішення про виявлення або невиявлення пачки ухвалюється на основі аналізу вмісту регістра логічною схемою. Число розрядів регістра рівне числу імпульсів в пачці - М, тобто аналізу піддається послідовність нулів і одиниць в межах ширини діаграми спрямованості антени РЛС. Конкретний вид логічної схеми може бути синтезований методами булевої алгебри з урахуванням забезпечення заданої вірогідності правильного виявлення Р обн і помилкової тривоги Р лт. Останні залежать від того, по якій кількості комбінацій нулів і одиниць в регістрі (із загальної кількості, рівної 2М) приймаєтся рішення про виявлення пачки. Очевидно, чим більше таких комбінацій, тим більше вірогідність правильного виявлення, але більше і вірогідність помилкової тривоги. 33. Цифровий вимірювач дальності цілей (рис. 5.20) Методи цифрового вимірювання дальності. У цифрових вимірювачах дальності час запізнювання відображеного сигналу, а відповідно і дальність до цілі, визначається шляхом рахунку N м = 2 rF м/c масштабних імпульсів U м, що мають достатньо високу і стабільну частоту повторення F м і укладену на інтервалі часу від моменту t о випромінювання зондуючого імпульсу до моменту приходу відображеного сигналу (рис.5.19). Кожен імпульс синхронізатора відмикає лічильник імпульсів, а наступний за ним відображений сигнал припиняє рахунок. До моменту випромінювання чергового імпульсу передавача дані лічильника вводяться в систему пам'яті вимірника і лічильник повертається в початковий стан, тобто дозволяє почати новий цикл рахунку. Дискретність відліку дальності складає Δ r = c /(2 F м), а число розрядів лічильника n визначається виходячи з максимуму дальності і допустимої помилки 2n ≥ r max/Δ r Приклад. При r max = 200 км і Δ r = 20 м величина r max/Δ r = 104, звідки n = 14.
Рис.5.19. Масштабні мітки дальності Пристрій, показаний на рис.5.20, дозволяє за період повторення зміряти дальність тільки до однієї цілі. Цей недолік можна усунути, якщо трігер закривати імпульсом кінця дистанції (ІКД), а у момент приходу імпульсу цілі, поточний код дальності записується в блок пам'яті спецобчислювача. При цьому процес рахунку не припиняється і з приходом іншого імпульсу цілі видається інше значення дальності. 34. Цифровий вимірювач азимута цілей (рис. 5.21) Методи цифрового вимірювання азимута. Азимут цілі визначається по центру пакету відображених сигналів з урахуванням поправки на затримку, що виникає при визначенні початку пакету
де − β н, βк - азимут початку і кінця пакету імпульсів, Δ - поправка на затримку. Початок і кінець пакету визначається шляхом міжперіодної логічної обробки сигналів. Азимутні напрями βн, βк визначають шляхом рахунку МАІ. Цифровий вимірник азимута може бути реалізований за допомогою пристрою, показаного на рис.5.21, включаючого виявляч з фіксацією меж пачки, перетворювач кута повороту антени в цифровий код і схему визначення центру пачки. Імпульси початку і кінця пачки використовуються для прочитування коду азимута з перетворювача, а зміряне значення азимута цілі (оцінка азумута) визначається по формулі β* = (βн + βк)/2, де β н, βк – азимут початку і кінця пачки відповідно. Перетворювач азимута в цифровий код включає датчик масштабної мітки «Північ», датчик масштабних азимутних імпульсів (МАІ) і m - розрядний двійковий лічильник. Схема визначення центру пачки складається з суматора, ключів Кл і Кл' і пристрою управління (трігер Т, схеми И1, И2, ИЛИ, ИЛИ2, ЛЗ-1, ЛЗ-2). Принцип роботи пристрою. Імпульсом «Північ» лічильник встановлюється в нульовий стан, а потім починає рахунок імпульсів МАІ, що приходять на його вхід з датчика МАІ. Паралельний двійковий код поточного значення азимута подається на ключі Кл. На другий вхід цих ключів поступають як комутуючі сигнали імпульси початку або кінця пачки. При приході з виявляча імпульсу початку пачки U н з лічильника в суматор переписується код азумута βн, а при приході імпульсу кінця пачки U к - код азимута βк. У суматорі обидва числа складаються і діляться навпіл шляхом зрушення на один розряд у бік молодших розрядів. Як імпульси зрушення використовується імпульс кінця пачки, що пройшов через схеми И1, (И2), ИЛИ2 і ЛЗ-1. Час затримки в цій лінії вибирається таким, щоб до моменту зрушення в суматорі закінчилися перехідні процеси, пов'язані з утворенням суми. Після закінчення зрушення з суматора видається код азимута цілі, і суматор встановлюється в початковий стан. 35. Вимірювач допплерівської частоти (рис. 5.22) У когерентно-імпульсних РЛС для вимірювання доплерівської частоти застосовуються багатоканальні фільтрові схеми (рис.5.22). У такій схемі передбачено n частотних каналів з узгодженими фільтрами, АЧХ яких перекриваються, і детекторами. Необхідне число каналів визначається по формулі
|
||||
|
|
Последнее изменение этой страницы: 2016-04-23; просмотров: 244; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.2 (0.014 с.) |