Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Допустимі відстані від краю укосу до найближчого механізмуСодержание книги
Поиск на нашем сайте
Таблиця 2.4 Застосування інвентарних кріплень
2.6. Продуктивність землерийних машин і шляхи її Продуктивністю машини називають роботу, що виконується за одиницю часу — годину, зміну, місяць, рік. Її можна визначити розрахунком (в цьому випадку вона буде називатися розрахунковою) або отримати заміром об’єму виконаної роботи за одиницю часу (в цьому випадку називається фактичною). Продуктивність машини в основному залежить від наступних факторів: - конструкції машини, тобто потужності двигуна, конструкції робочого органу, швидкості переміщення, системи керування, надійності машини і зручності її обслуговування; - виробничих умов, які можуть бути загальними для усіх машин і індивідуальними для окремих машин. Тип споруди, вид роботи і атмосферні умови – загальні умови для усіх машин. Індивідуальні виробничі умови для окремих машин, наприклад, для самохідних — рельєф місцевості і якість доріг; для землерийних машин — група ґрунту, висота забою, відстань переміщення ґрунту тощо; - кваліфікації і майстерності машиністів, ступінь володіння передовими методами та прийомами керування машиною, підтримування її в робочому стані; - організації і технології виконання робіт: використання поточних методів організації робіт, забезпечення машин фронтом робіт, будівельними і паливно-мастильними матеріалами, правильне комплектування машин за робочими параметрами і по продуктивності, призначення кількості робочих змін на добу, використання мережевих методів керування будівництвом тощо. Усі ці фактори, крім конструкції машини, змінні. Впливаючи на них і керуючи ними, можна досягти підвищення продуктивності машини. Великий резерв у збільшенні продуктивності машин — це зменшення тривалості і числа перерв в їх роботі. Причиною перерви в роботі може бути: - технологічна необхідність (чекання при попередньому відводі води з траси каналу чи котловану, чекання під час зволоження чи підсушування ґрунту, що укладається в греблю чи дамбу, чекання зміни транспортних засобів при роботі екскаватора, зміна ділянок роботи і т.д.); - організаційні неполадки (невчасна доставка машиністів та робочих, а також паливно-мастильних матеріалів до місця роботи, відсутність фронту робіт, відсутність узгодженості в роботі машин, низька дисципліна праці робочих, невчасне і погане технічне обслуговування машин); - випадкові причини (сильний дощ, мороз, вітер, поломки в машині, хвороба машиніста тощо). Задача кожного керівника виробництва — максимально досягати зниження простоїв машин, ліквідовувати і попереджувати причини, що викликають ці простої. Розрізняють три види продуктивності машин — конструктивна, технічна і експлуатаційна. Конструктивна продуктивність характеризує конструктивні можливості машини і потрібна для порівняння варіантів машин при їх проектуванні. При її розрахунку враховують конструктивні особливості машин: параметри і швидкість руху робочих органів, потужність двигуна, швидкість пересування машини. При цьому до уваги не беруть технологічні і організаційні перерви, кваліфікацію машиніста, зручності при технічному обслуговуванні машини, вплив шуму і вібрації в кабіні на втомлюваність машиніста і т.д. Технічна продуктивність характеризує технічні можливості машини в конкретних виробничих умовах. Крім конструктивних властивостей машини, при її розрахунку враховуються: умови виконання робіт (група ґрунту, висота забою, коефіцієнт наповнення ковша, кут повороту, відстань переміщення і т.д.); технологічні перерви в роботі. Не враховуються організаційні перерви, які зазвичай характеризуються коефіцієнтом використання машини. Технічна продуктивність потрібна для порівняння машин між собою і використовується для розрахунку експлуатаційної продуктивності машини. Вона рівна об’єму роботи, яка виконана за 1 год робочого часу в конкретних виробничих умовах. Експлуатаційна продуктивність на відміну від технічної визначається з врахуванням організаційних перерв в роботі машини (простої для заправки машини паливно-мастильними матеріалами, водою, перерви в роботі через зміни забоїв, робочого обладнання, перерви для відпочинку машиніста тощо). На відміну від конструктивної і технічної продуктивності, які визначають за 1 год роботи машини, розрахунок експлуатаційної продуктивності ведуть не лише за 1 год роботи, а і за зміну, місяць, рік. При розрахунку будь-якої експлуатаційної продуктивності враховуються усі простої машини. Експлуатаційна продуктивність використовується для розробки проектів виконання робіт, організаційно-технічних заходів по виконанню планів робіт, розробки мережевих графіків і календарних планів будівництва. В практиці будівництва використовуються також річні директивні норми виробництва. Їх не варто змішувати з експлуатаційною річною продуктивністю, яка визначається за формулою: Пе.річ = N∙Пт∙Кв.р., (2.7) де П т – технічна продуктивність, м3/год; N – розрахункове число годин роботи машини протягом року; Кв.р. – коефіцієнт використання машини за часом протягом року. На відміну від неї річна, чи директивна норма виробництва встановлюється на середньосписочну машину даного типу, що знаходиться на балансі будівельної організації (наприклад, весь парк одноківшевих екскаваторів розділяється на 3 групи: група І — екскаватори з місткістю ковша до 0,25 м3, група II — екскаватори з місткістю ковша від 0,25 до 0,5 м3 і група III — екскаватори з місткістю ковша понад 0,5 м3. Відповідно на всі ці групи машин і даються директивні норми річного виробництва). Директивні норми річного виробництва машин встановлюються на основі аналізу звітних даних будівельних організацій про використання машин за минулий рік. Формули для розрахунку продуктивності землерийних машин в загальному вигляді можна представити в таблиці 2.5: Таблиця 2.5. Розрахунок продуктивності землерийних машин
де q — геометричний об’єм ковша екскаватора, м3; n — число циклів роботи машини за 1 хв; Кн — коефіцієнт, що враховує ступінь наповнення ґрунтом місткості робочого органа (ковша, відвалу і т.д.); qn∙Кн — об’єм ґрунту, що переміщується робочим органом машини за один цикл її роботи; Кв — коефіцієнт використання машини за часом під час зміни; 60 — число хвилин в одній годині. Взявши за основу ці формули, можна отримати з них формули для визначення продуктивності будь-якої землерийної машини. Формули будуть відрізатися між собою лише розрахунком об’єму ґрунту в робочому органі машини і числом циклів за одиницю часу. При розрахунках технічної і експлуатаційної продуктивності об’єм ґрунту в робочому органі приводиться до об’єму ґрунту в природному стані, для цього достатньо його розділити на коефіцієнт розпушування ґрунту. Для одноківшевих екскаваторів і скреперів об’єм ґрунту, що переміщується за цикл, рівний qКн. Число циклів екскаватора за хвилину визначається при нормальній висоті забою, що забезпечує наповнення ковша за один прийом, при куті повороту стріли на 90° з вивантаженням ґрунту у відвал і при поєднанні найбільшого числа робочих рухів в одному циклі. Для багатоковшевих екскаваторів замість числа циклів із формули для розрахунку продуктивності підставляють кількість ковшів, що розвантажуються за одиницю часу, наприклад за 1 хв. Тривалість одного циклу роботи скрепера і бульдозера рівна сумі часу, що витрачається для набору ґрунту, вантажного ходу, вивантаження, порожнього ходу і переключання швидкостей трактора. Об’єм ґрунту перед відвалом бульдозера: W=bh2 /tg φ Кв, (2.8) де b — ширина відвалу; h — висота відвалу; φ — кут природного укосу ґрунту в русі перед відвалом; Кn — коефіцієнт, що враховує втрати ґрунту при переміщенні ґрунту на відстань L (Кn=1–0,005L). Об’єм ґрунту, що розробляється грейдером і канавокопачем за один прохід: q = ωl, (2.9) де ω — площа поперечного перерізу стружки (виїмки); l — довжина робочого ходу. Тривалість циклу роботи грейдера і канавокопача рівна сумі часу, що витрачається на робочий хід, повороти, холостий хід (якщо він є), установку робочого органу. Шляхи підвищення продуктивності машин поділяються на загальні (для усіх землерийних машин) і індивідуальні (для кожного типу машини і моделі). Загальні шляхи підвищення продуктивності машини: підвищення коефіцієнта використання машини під час зміни за рахунок ліквідації організаційних і технологічних перерв; організація багатозмінної роботи; ліквідація сезонності в роботі машин; використання машин за прямим призначенням; підвищення кваліфікацій машиністів; своєчасне і якісне проведення планово-попереджувальних ремонтів; хороша організація технічного обслуговування машин; створення спеціальних бригад технічного обслуговування машин і механізмів, що працюють за суворо встановленим графіком; розпушування важких ґрунтів, очищення робочих органів від налипаючих ґрунтів, попереднє осушення водонасичених ґрунтів і забоїв, поливання пересохлих ґрунтів. Індивідуальні шляхи підвищення продуктивності машин пов’язані з використанням на робочих органах машин різних пристосувань, а також прийомів, що полегшують роботу їх в забоях, зменшують тривалість циклу. Для одноківшевих екскаваторів це: - поєднання окремих робочих рухів в циклі (підйом ковша і поворот до місця вивантаження, поворот і опускання ковша); робота з найменшим кутом повороту стріли; при роботі в транспорт місткість кузовів повинна бути рівною 5…7 місткостям ковша екскаватора; - застосування змінних ковшів в ґрунтах різних груп. Для багатоківшевих екскаваторів: належне налаштування екскаватора (вибір правильного відношення між розмірами виїмки, швидкістю руху ковшів і робочою швидкістю пересування самого екскаватора). Для скреперів це: - скорочення циклу (правильно вибрана робоча схема руху скрепера в даних умовах, набір ґрунту виконувався під ухилом до 20°, вибирати трасу шляху з ухилами, що забезпечують найбільші швидкості руху скрепера); - використання штовхача на важких ґрунтах, використання раціональних прийомів зарізання ґрунту (уступами, шахово-гребінчасте). Для бульдозерів це: - використання спеціальних бокових відкрилок, спеціальних відвалів ящикової форми; -переміщення ґрунту одночасно 2–3 бульдозерами, які рухаються паралельно на відстані 0,3…0,5 м один від одного; - розробка і переміщення ґрунту по траншеях, які нарізаються на відстані 0,5 м одна від одної, з наступним видаленням перемичок; - влаштування на початку робіт поперечної траншеї на глибину 1 м, а перпендикулярно їй — поздовжньої траншеї: далі розробка ґрунту здійснюється шляхом зрізання ґрунту боковим краєм відвалу зі стінки поздовжньої траншеї з поступовим її розширенням. Для грейдерів це: - збільшення ширини захвату і глибини різання, використання подовжувачів відвалу на легких ґрунтах, найбільш повне використання потужності двигуна машини; - зменшення числа холостих проходів і поворотів шляхом збільшення гону до 500…1000 м; - використання найбільших робочих швидкостей пересування машини.
Для канавокопачів це: - нарізка осушувачів до будівництва каналів вищого порядку; використання робочих ходів в обох напрямках. Контрольні питання. 1. Перерахувати фізичні характеристики грунтів, їх склад. 2. Перерахувати постійні і тимчасові земляні споруди. 3. Описати класифікацію машин для виконання земляних робіт. 4. Описати способи виконання земляних робіт. 5. Вибір будівельної ділянки та умов будівництва. 6. Які роботи відносяться до підготовчих і допоміжних при влаштуванні ділянок? 7. Продуктивність землерийних машин і шляхи їх підвищення. 3. Основи геодезії 3.1. Поняття про геодезію і її роль у будівництві Геодезія — наука про визначення форми і розмірів Землі та про виміри на земній поверхні для відображення її на планах і картах. Планом називають креслення, на якому в зменшеному вигляді зображена горизонтальна проекція невеликої ділянки земної поверхні. При цьому на планах нехтують кривизною земної поверхні. Картою називають креслення, на якому з урахуванням кривизни загальної форми Землі зображена значна частина земної поверхні або будь-яка її частина в узагальненому і зменшеному вигляді. Різний рельєф місцевості (рівнини, гори, западини тощо) на планах і картах показуються горизонталями — лініями, що з’єднують точки земної поверхні, які знаходяться на одній горизонтальній площині. Відстань між горизонталями на плані дає уявлення про крутизну рельєфу: чим крутіший рельєф, тим ближче горизонталі одна до одної, і навпаки, рівнинний рельєф характеризується рівновіддаленими горизонталями. Для визначення відносного по висоті розміщення точок на земній поверхні вимагається завжди знати висоти цих точок над рівнем моря або різницю їх висот. В Україні за вихідну точку, від якої йде відлік усіх висотних точок, прийнято нуль кронштадтського футштока, який показує середньобагаторічний рівень води у Фінській затоці. Він відмічений рискою на мідній дошці одного з мостів через обхідний канал в Кронштадті (рис. 3.1).
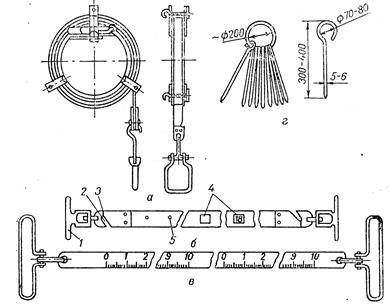
Рис. 3.1. Основна рівнева поверхня Висоти точок А і В є відрізки Н Суть геодезичних робіт полягає у вимірі кутів, ліній і перевищень між точками в процесі проектування та будівництва. Вони передують, супроводять і завершують процес будівництва. Геодезичні роботи можна розбити на наступні основні стадії: створення планово-висотного обґрунтування; винесення в натуру і закріплення основних осей; детальні розбивочні роботи при виконанні нульового циклу; детальні розбивочні роботи при зведенні надземної частини; виконавча зйомка геометричного положення змонтованих конструкцій із складанням виконавчих схем. Початковим матеріалом для проектування є топографічні плани будівельного майданчика. Для топографічної зйомки на майданчику створюється геодезичне обґрунтування або опорна геодезична мережа. Опорні мережі бувають планові і висотні. Планова геодезична мережа має вигляд ланцюжків трикутників і ламаних ліній. Спочатку будують мережу першого класу (перший клас найбільш точний), потім між точками першого класу з опорою на них визначають мережу точок другого класу і т. д. до точок четвертого класу. Головною геодезичною основою служать державні і міські геодезичні мережі. Пункти основи — це точки, що визначають положення поздовжніх і поперечних осей будівель і споруд, їх габарити, проектні (червоні) або інші лінії забудови. Найбільш поширеним видом геодезичної основи для розбивочних робіт є будівельна сітка, яка має форму квадратів із сторонами 100×100 або 200×200 м. Будівельна сітка прив’язана до державної системи координат. Висотна основа представляє собою точки, що дають висоту цього пункту над рівнем кронштадтського футштока, і ці точки об’єднані в систему державного нівелювання 1...4 класів. Сторони будівельної сітки намагаються розташовувати паралельно основним осям будівель і споруд або червоним лініям забудови, а вершини сітки розміщують так, щоб вони були збережені на увесь період будівництва. Значну частину точок, координати яких визначені при геодезичних вимірах, позначають на місцевості геодезичними знаками, які бувають підземні і зовнішні. Підземні знаки довговічні і виконуються у вигляді бетонних або залізобетонних монолітів, розташованих нижче за глибину промерзання ґрунту, а зовнішні – у вигляді металевих пірамід або дерев’яних сигналів (висотою від 6 до 50 м), що характеризують планове положення і висоту. Залежно від призначення геодезичні знаки бувають постійними і тимчасовими, а за місцем розташування — ґрунтовими (рис. 3.2) або стінними (рис. 3.3). Закріплена на будівельному майданчику геодезична основа зазвичай містить будівельну сітку, червоні лінії, пункти тріангуляції, теодолітні і нівелірні ходи. Осі, що визначають положення і габарити будівель та споруд в плані, закріплені знаками (не менше чотирьох на кожну вісь), а також осі інженерних комунікацій, що закріплені знаками на прямих ділянках (не менше, чим через 0,5 км) і на кутах повороту. Репери розташовуються по межах і усередині забудовуваної території. Дерев’яний репер (рис. 3.4) – стовп діаметром 15...18 см, закопаний в ґрунт нижче за глибину промерзання. Бетонований рейковий репер (рис. 3.5) виконується з нанесеними записами керном. Він встановлюється також нижче за глибину промерзання. Трубчастий бетонований репер (рис. 3.6) має вигляд металевої труби діаметром 40...60 мм, частіше встановлюється на сипких пісках. Стінні репери або стінні марки закладаються в цоколі будівель на висоті 0,5 м від поверхні землі на відстані 1...2 км один від одного. Для закріплення другорядних точок при тривалості будівництва не більше одного сезону застосовуються ґрунтові знаки, металеві милиці, штири з арматури або обрізків труб, цвяхи і дерев’яні кілки (рис. 3.7). На усіх геодезичних знаках положення осей наносять у вигляді риски, відтіненою важкозмивною фарбою, а висоти маркують горизонтальною рискою з вказанням значення відмітки (рис. 3.8). Для геодезичних робіт у будівництві широко застосовують наступні прилади і інструменти. Довжини ліній вимірюють землевимірювальними стрічками, рулетками, дротами і шпильками (рис. 3.9).
Рис. 3.2. Ґрунтовий репер . Рис. 3.3. Стінні знаки-репери: стаканного типу (а), з сферичною головкою (б): 1 – стіна, 2 – назва відомства, 3 – номер знаку, 4 – дюбель,
Рис. 3.4. Дерев’яний репер (розміри дано в м)
Рис. 3.7. Наземні центри закріплення осей і відміток:
Рис. 3.8. Забарвлення осей (а, б) і відміток (в) на конструкціях
Рис. 3.9. Мірні стрічки: Сталеві рулетки випускаються у відкритому (В) і закритому (З) корпусах завдовжки 10, 20, 30, 50, 75, 100 м. Нині оптичні, оптично-механічні і механічні прилади та пристрої вимірювання довжин ліній та віддалей вже поступаються і продовжують поступатися сучасним високоточним електронним і лазерним рулеткам, які випускаються фірмами Leica, Sokkia, Topcon,Trimble-Zeiss та інші. Лазерними рулетками вимірюють віддалі 0,2…400 м, а похибка вимірювань становить 1,5…5 мм незалежно від віддалі. Наприклад, лазерні рулетки типу Digtoтм (Leica) вимірюють віддалі від 0,2 до 200 м з точністю ± 1,5 мм. Габаритні розміри рулетки становлять 172×73×45 мм, а маса 335 г. Крім цих приладів широко використовують світловіддалеміри, радіовіддалеміри і глобальні системи позиціонування (GPS-системи). Світловіддалеміри, які використовуються в геодезичних вимірюваннях, відрізняються один від одного радіусом дії, послідовністю вимірювання ліній, функціональною схемою тощо. Середня квадратична похибка вимірювання ліній віддалеміром залежить від довжини лінії. Згідно ДЕСТ світловіддалеміри поділяють на геодезичні, що застосовуються для створення державних геодезичних мереж, прецизійні, які використовуються для високоточних вимірювань довжин ліній в інженерній геодезії, і топографічні, які використовуються для створення геодезичних мереж згущення, знімальних мереж і для топографічного знімання. Залежно від типу фазометра світловіддалеміри поділяються на три покоління: - оптичні фазометри; - аналогові; - цифрові. В останніх процес вимірювань — автоматизований. Часто вони обладнуються міні-ЕОМ, завдяки чому є можливість, наприклад, обчислити середнє із ряду вимірювань, виключити багатозначність, оцінити точність отриманих результатів тощо. Програмне забезпечення цих світловіддалемірів передбачає введення метеорологічних поправок у виміряні довжини ліній, приростів координат і самих координат тощо. До багатьох прийомопередавачів можна під’єднувати накопичувач інформації. Відомі фірми AGA Geotronics, Leica, Trimble-Zeiss, Sokkia виготовляють численні віддалеміри. Так, AGA Geotronics виготовляє топографічні віддалеміри типу «геодиметр» моделей 10, 12, 12А, 110, 216 та інші. Кожна з моделей має свої характерні особливості, що дає змогу рекомендувати її переважно для певного виду робіт. Наприклад, Геодиметр 110 зручний для створення геодезичної мережі при інженерних вишукуваннях, для винесення проектів у натуру, для роботи в режимі відстеження. Геодиметр 210, 216, 220 є мікровіддалемірами, що мають малу масу і габаритні розміри, тому їх можна закріплювати на зорових трубах оптичних теодолітів. Фірма Leica (Wild) пропонує світловіддалеміри типу Дістомат (D1 1001, D1 1600, D1 2002, D1 3000, D1 3000S), які здебільшого є насадками на теодоліт. В них передбачена автоматична реєстрація результатів вимірювань та перетворень даних. Фірма Trimble-Zeiss пропонує топографічні світловіддалеміри третього покоління типу Elcli, які відрізняються один від одного переважно радіусом дії. Малі світловіддалеміри Red фірми Sokkia можна встановлювати на штативі або теодоліті. У віддалемірі Red-2 приймальна і передавальна системи суміщені. Програмне забезпечення приладу передбачає введення кута нахилу лінії, метеорологічної поправки, визначення перевищення кінців лінії, координат відбивача, а також відхилення його від проектного положення. Радіовіддалеміри використовуються здебільшого для вимірювання віддалей за відсутності прямої видимості між кінцями вимірювальної лінії. Для цих випадків використання світловіддалемірів неможливе. Радіовіддалеміри для вимірювання довжин ліній використовують електромагнітні хвилі коливання надвисокої частоти (НВЧ) — радіохвилі довжиною 10, 3 і 1 см. Телурометри сантиметрового діапазону (за назвою фірми Telluronnter – Південно-Африканський Союз) вирізняє висока точність вимірювання. Так, телурометр CMW 20 (ПАС), який можна встановити на штативі і на трубі теодоліта і аналогічний йому Т10 фірми Wild можуть працювати в режимі відстеження. Радіус дії приладів 0,02…25 см, точність 5 мм t = 3·10–6 L. Останні моделі телурометрів за точністю наближаються до світловіддалемірів. Геодезичні прилади для вимірювання віддалей, які створені за новітніми технологіями, є доволі досконалими. Проте точність геодезичних вимірювань на земній поверхні традиційними способами є обмеженою, зокрема внаслідок постійних змін параметрів приземного прошарку атмосфери. Альтернативним розв’язком цієї проблеми є просторові вимірювання, для яких використовуються штучні супутники Землі (ШСЗ), що безперервно рухаються як носії координатної системи. Вимірювальні комплекси, що базується на цьому принципі, називаються глобальними системами позиціонування (GPS,
Комплекси або системи GPS випускають фірми Trimble, Sokkia, Leica та інші. Фірма Trimble пропонує різноманітні GPS-комплекси з дво- і одночастотними приймачами. Двочастотні приймачі Trimble 5700, R7 (обидва GPS Total Station), 5800 RTU, R8 RTU забезпечують точність вимірювання в плані статичним способом ±5мм+0,5мм/км, а кінематичним ±10мм+1мм/км. По висоті точність вимірювань статичним способом ±5мм+2мм/км, а кінематичним ±20мм+2мм/км.
Рис.3.10. Схема встановлення GPS-приймача: Фірма Sokkia пропонує геодезичні GPS-системи GPS 2600, Radian, Radian 1S з двочастотними приймачами, які забезпечують точність вимірювання статичним способом в плані ±5мм+1ррм, а кінематичним ±10мм+2ррм; по висоті статичним способом ±10мм+1ррм, а кінематичним ±20мм+1ррм. Двочастотні приймачі фірми Leica серії GPS 1200: GX 1230, GX 1220, GPX 1200 Pro CORS за точністю не поступаються приладам двох згаданих вище фірм. Проте, на відміну від інших фірм, Leica пропонує систему 1200 (електронний тахеометр з інтегрованим GPS-приймачем – Leica Cmart Station). Керування тахеометром, GPS-приймачем і всім програмним забезпеченням здійснюють клавіатурою тахеометра (типу TPS 1200). Результат вимірювань, інформація про зміни, а також інші дані висвітлюються на дисплеї TPS і зберігаються в одній базі даних на одній карті пам’яті типу Compact-Flash. Це дає змогу пришвидшити виконання геодезичних робіт порівняно з традиційними методами. Цікавою є пропозиція щодо поєднання GPS-1200 у комбінації з віддалемірними пристроями, наприклад лазерною рулеткою типу DISTO. Перевищення однієї точки над іншою визначають нівелірами, які випускаються з циліндричним рівнем і з лінією візування, що самовстановлюється, і нівелірними рейками. Застосовують нівелірні черевики і милиці. В будівництві за технічними характеристиками передбачено три типи нівелірів: технічні, точні та високоточні. Технічні нівеліри використовуються для створення висотної основи топографічного знімання, інженерно-геодезичних вишукувань і вимірювань у будівництві та визначають перевищення із середньою квадратичною похибкою не більше ніж ±10 мм на 1 км подвійного ходу. Точні нівеліри застосовуються для нівелювання ІІІ і ІV класів з середньою квадратичною похибкою визначення перевищення на 1 км подвійного ходу, яка не повинна перевищувати ±3 мм. Високоточні нівеліри (прецизійні) дають змогу визначити перевищення із середньою квадратичною похибкою не більше, ніж ±0,5мм на 1км подвійного ходу; їх використовують для нівелювання І і ІІ класу, а також для виконання прецизійних інженерно-геодезичних робіт. Сьогодні провідні фірми, що випускають геодезичні прилади Leica, Trimble-Zeiss, Sokkia, Topson, Nipson, Keru, УОМЗ та інші, пропонують технічні і точні нівеліри різних модифікацій і серій, наприклад NA 700, NA 720, NA 724, NA 728 тощо — Leica; Ni 30, Ni 40, Ni 50, серії AL — Trimble-Zeiss; B2, B1, C-4 — Sokkia; 3Н-3КЛ, 3Н-2КЛ, 4Н-2КЛ-УОМЗ; НИ-3, НИК-2 — Ізюмський завод, Україна. Високоточні (прецизійні) нівеліри, крім традиційних вимірювань, застосовуються ще для визначення рухів земної кори, осідань споруд, деформацій великогабаритних механізмів. В будівництві об’єктів на теренах України ще до сьогодні широко використовується високоточний нівелір Н-05 ще виробництва СРСР. Високоточні нівеліри з рівнями поки що випускаються провідними приладобудівними фірмами світу, наприклад, високоточний нівелір N3 фірми Leica, PL1 фірми Sokkia. В обох цих нівелірах середня квадратична похибка визначення перевищення на 1 км подвійного ходу становить ±0,2 мм. Самовстанівні високоточні нівеліри переважають рівневі за загальною кількістю і за розмаїттям моделей. Так, наприклад Ni 10 (Trimble-Zeiss), NA2, NAК2 (Leica), B1C, B1 (Sokkia) та інші широко використовуються в будівництві та інженерних вишукуваннях. Цифрові (електронні) нівеліри є новим поколінням приладів для визначення висот точок. Наявність у конструкції приладів електронних давачів дає змогу в автоматичному режимі брати відліки з рейки зі штриховим кодом, контролювати результати вимірювань, опрацьовувати їх вмонтованою у прилад ЕОМ і зберігати у накопичувачі (рис. 3.11).
Рис.3.11. Цифровий нівелір SDL 30 Для автоматичного відлічування штрихкодової рейки достатньо її тридцятисантиметрового відрізка — по 15 см догори і донизу від лінії візування. На одне вимірювання витрачають від трьох до дев’яти секунд. Багаторазові вимірювання осереднюються автоматично. Цифровими нівелірами вимірюють перевищення і довжини плечей нівелювання. Програмне забезпечення цифрових нівелірів дає змогу одразу після наведення приладу на рейки одержати перевищення та відмітки точок нівелювання. Повторні вимірювання практично виключаються внаслідок автоматичного визначення похибок і введення поправок. Програмним забезпеченням деяких сучасних цифрових нівелірів передбачено врівноваження вимірювань. Загалом цифрові нівеліри дають можливість повернутися до перерваних вимірювань. Панелі керування приладів слугують також для алфавітно-цифрового введення номерів та кодів точок і різновидів додаткової інформації. Результати вимірювань та їхнього опрацювання можуть бути занесені до карт пам’яті або до внутрішньої пам’яті приладу. Цифрові нівеліри зазвичай споряджені компенсаторами нахилу. Разом із автоматичним режимом цифровими нівелірами можна виконувати візуальне нівелювання як оптичними нівелірами, застосовуючи рейки із традиційними шкалами, звичайно, з меншою точністю. Вважають, що використання цифрових нівелірів підвищує продуктивність виконуваних робіт на 50%. За мінімального часу одного вимірювання ємності батарей деяких нівелірів може вистачити на три дні. Цифрові нівеліри виготовляють провідні фірми світу Trimble-Zeiss — DiNi 10, DiNi 11, DiNi 11T, DiNi 12, DiNi 12T, DiNi 20, DiNi 21, DiNi 22; Leica — NA 2002, NA 3003, DNA 10, DNA 03, Sprinter 100(100м); Sokkia SDL 30 та інші. За точністю цифрові нівеліри можна характеризувати як високоточні та точні. Високоточні цифрові нівеліри, що наведені вище використовуються для нівелювання І і ІІ класу, а також для прецизійних інженерно-геодезичних вимірювань. Останнім часом широке визнання набули лазерні прилади, які дають можливість замінити візирну вісь зорової труби геодезичних приладів видимим пучком світлових променів, які мають певні просторово-часові та енергетичні параметри. Лазерні геодезичні прилади дають можливість спростити деякі геодезичні роботи, автоматизувати процес вимірювань, знімати інформацію безпосередньо на об’єкті вимірювань. Остання особливість цих геодезичних приладів дає змогу спростити деякі види інженерно-геодезичних робіт, підвищити їхню продуктивність під час будівництва споруд, монтажу та встановлення промислового обладнання, особливо великогабаритного. Лазерні геодезичні прилади не заміняють електронні або оптичні, швидше доповнюють їх, розширюючи коло завдань, що розв’язують під час геодезичних вимірювань. Тому що у приладах використовують такі важливі особливості лазерного випромінювання, як гостра (вузька) спрямованість, монохроматичність, просторова і часова когерентність, поляризованість. Застосовують звичайно лазерні випромінювачі безперервної дії, наприклад, газові, які мають потужність від 0,5 до декількох десятків мВт (зазвичай не більше ніж 30 мВт). Від інших лазерних випромінювачів, наприклад, напівпровідни
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-04-19; просмотров: 301; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.113 (0.021 с.) |


 і Н
і Н  , а перевищення точки В над А характеризується величиною h, тобто h = НВ – НА. Величини НА і НВ прийнято називати абсолютними висотами. Якщо висоти відрізняються від умовної рівневої поверхні, то їх називають умовними висотами, а чисельне вираження висоти точки називається її відміткою.
, а перевищення точки В над А характеризується величиною h, тобто h = НВ – НА. Величини НА і НВ прийнято називати абсолютними висотами. Якщо висоти відрізняються від умовної рівневої поверхні, то їх називають умовними висотами, а чисельне вираження висоти точки називається її відміткою.