Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
К выполнению практических занятий поСодержание книги Поиск на нашем сайте Алгоритмизация и программирование задач логического управления Разработка алгоритмов и программ для СЛУ проводится в такой последовательности: 1. Формулирование требований к системе управления: выбор входных хi и выходных uj (управляющих) переменных. 2. Математическая формулировка задачи управления: составление таблицы истинности, представление зависимостей выходных переменных от входных в аналитической форме – логическими формулами uj=fj (хi), где 3. Минимизация логических функций. 4. При аппаратной реализации СЛУ синтезируется принципиальная электрическая схема на заданной элементной базе. При программной реализации системы логического управления составляется алгоритм и программа решения задачи управления в соответствии с системой команд выбранного МП или МК. Программирование осуществляется на языке МК либо на каком-либо макроязыке с последующим ассемблированием. 5. Отладка, испытание и ввод в эксплуатацию системы управления. Расчётное задание выполняется для объекта управления, представляющего собой резервуар-смеситель, в котором при смешивании двух исходных материалов производится готовый продукт (рис. 1).

Рис. 1. Объект управления – резервуар-смеситель
Контролируемыми параметрами являются: - Q1 = x1 – концентрация первого компонента в готовом продукте; - Q2 = x2 – концентрация второго компонента в готовом продукте; - L = x3 – уровень готового продукта в резервуаре. Задача системы управления состоит в поддержании определённого соотношения компонентов в продукте и запаса готового продукта, т.е. его уровня в резервуаре. Для управления могут использоваться клапаны 1, 2 на трубопроводах подачи исходных материалов и 3 – на трубопроводе слива готового продукта. Входные переменные x1, x2, x3 системы управления рассматриваются как дискретные, принимающие значения «0» при нормальной величине соответствующего технологического параметра или «1» - при отклонениях от нормы. В зависимости от постановки задачи управления за единичное значение входной переменной может приниматься её величина ниже нормы или выше нормы. Очевидно, что если одновременно x1 = 1 и x2 = 1, то это означает неисправность одного из концентратомеров. Управляющие переменные также принимают дискретные значения «0» или «1», им соответствуют сигналы прикрытия u1, u2, u3 или приоткрытия u2, u4, u6 клапанов. Составление таблицы истинности Рассмотрим вариант (в данном случае возможно 8 вариантов) составления таблицы, когда логическая «1» соответствует входным сигналам х1, х2, х3 меньше нормы, а для управления используется клапан 1 в направлении «больше» (т.е. u2) и клапан 2 (т.е. u3 и u4). Если входные переменные не отклоняются от нормы (х1 = х2 = х3=0), то не требуется управляющих воздействий (u2 = u3 = u4 = u7 = 0). Это состояние соответствует первой строке таблицы истинности (таблица 1). Таблица 1
При уменьшении концентрации компонента 1 (х1 = 1) увеличиваем расход компонента 1 (воздействие u2 = 1) и уменьшаем расход компонента 2 (воздействие u3 = 1, строка 2) и т.д., перебирая возможные отклонения входных сигналов от нормы (последующие строки таблицы 1), записываем соответствующие значения управляющих воздействий. Строки 4 и 8 таблицы, соответствующие неисправности концентратомера используются для выработки аварийного сигнала u7 = 1. Далее записываются логические выражения для управляющих воздействий в совершенной дизъюнктивной нормальной форме (СДНФ) или совершенной конъюнктивной нормальной форме (СКНФ) по выбору разработчика системы. Задание № 1. Синтез комбинационных логических схем. Задача получения таблицы истинности функционирования СЛУ формализована. Исходная таблица истинности может быть получена из таблицы 2. Таблица 2.
Таблицы истинности составляют следующим образом: - 3 левые столбца (таблица 3) содержат возможные комбинации входных воздействий в возрастающем порядке; - 4 следующих столбца содержат потетрадную двоичную запись заданных управляющих воздействий, представленную в виде последовательности восьми двоичных разрядов (старший двоичный разряд записывается в первой строке). Например, для варианта №1 таблица истинности имеет вид (u1 = 4Е, u3 = 06, u5 = 93, u7= ED), таблица 3.
Таблица 3
Заполнение столбца U1 табл.3 осуществляется сверху вниз по стрелке, начиная с крайнего левого знака. Аналогично заполняются столбцы для управляющих воздействий u3, u5, u7. При аппаратной реализации СЛУ комбинационная схема синтезируется в двух базисах: булевском и заданном. В булевском базисе синтезируется общая принципиальная схема, имеющая 3 входа (аргументы х1, х2, х3) и 4 выхода, указанные в таблице 3 (для рассмотренного примера U1, U3, U5, U7). Число входов логических элементов может быть любым. В заданном базисе синтезируются 5 схем на логических элементах 2И-НЕ для нечётных номеров и на логических элементах 2ИЛИ-НЕ – для чётных. Первоначально синтезируются 4 схемы (по одной для каждого управляющего воздействия). Затем составляется общая принципиальная схема, в которой исключаются дублирующие входные инверторы и участки схем, формирующие одинаковые части логических выражений, описывающих разные управляющие воздействия. Теоретический раздел этой части работы включает: 1. Минимизацию логических выражений для управляющих переменных: - табличным способом для первой переменной; - алгебраическим способом для второй переменной; - с помощью карт Карно для третьей переменной; - любым из известных способов для четвёртой. 2. Синтез схемы управления в булевском базисе. 3. Синтез схем управления в заданном базисе. Практический раздел этой части задания заключается в монтаже разработанных схем на лабораторном стенде и проверке их функционирования по таблице истинности. При проверке работоспособности разработанных электрических схем на стендах комбинации переменных х1, х2, х3 задаются переключателями на 8 положений. Значения переменных индицируются светодиодами зелёного цвета. Управляющие сигналы подаются на соответствующие гнёзда стендов и их значение индицируется светодиодами красного цвета. Светодиоды светятся при отображении уровня логической 1. Соединения элементов схемы, подключение входных и управляющих воздействий производятся проводами с однополюсными вилками. Оформление расчётного задания должно включать: 1. Задание. 2. Таблицу истинности. 3. Минимизацию функций с пояснениями. 4. Принципиальные схемы в булевском базисе и заданном. 5. Перечень совершённых ошибок.
Задание №2. Программная реализация СЛУ. Программная реализация алгоритмов логического управления основана на применении микропроцессорных средств. Преимущества такого подхода проявляются в повышении унификации алгоритмического уровня, точности работы аппаратуры, расширении возможностей по резервированию, гибком изменении функций и оперативной модернизации алгоритмов. Характерной особенностью программируемого МК является выполнение логических операции, циклический опрос и ввод переменных, вычисление значений логических функций, формирование и вывод управляющих сигналов для включения и выключения исполнительных устройств. Программы логического управления могут быть организованы различными способами в зависимости от типа применяемого микроконтроллера. При выполнении третьей части расчётного задания необходимо составить программу, обеспечивающую управление объектом, функционирующим по алгоритму, заданному таблицей 3, причём возможно использование любых микропроцессоров малой и средней степени сложности (PIC, AVR, МК51 и др.). В лаборатории СЛУ реализована на МП серии MSP 430. Также в лаборатории имеются описание аппаратуры стендов и правила пользования контроллером, необходимые для проверки работоспособности разработанной СЛУ. Методические указания к выполнению 3 части РГР.
Создание принципиально новой элементной базы – микропроцессоров (МП) – послужило предпосылкой для реализации новой идеологии в построении приборов, систем обработки данных и управления. МП представляет собой универсальную полупроводниковую большую интегральную схему (БИС) с программируемой логикой. МП включает в себя средства обработки информации и управления процессом обработки и в настоящее время состоит из одной программно-управляемой БИС. Для систем управления характерна значительная взаимоудалённость компонентов системы. Применение МП невысокой стоимости и малых габаритов позволяет устанавливать их непосредственно на управляемом оборудовании (встроенные МП средства). Такой подход вносит существенные коррективы в стратегию управления, что относится в первую очередь к созданию распределённых (децентрализованных) систем управления технологическими процессами (ТП) и производствами. Особенность таких систем заключается либо в рассредоточенном расположении средств управления, либо в разделении функций управления между несколькими МП комплексами, либо в том и другом одновременно. Основными чертами распределённых систем управления является их более высокое быстродействие, гибкость и адаптивность к решению задач, повышенная живучесть. Основными средствами локального управления в настоящее время являются МП контроллеры или микроконтроллеры (МК), включающие в себя МП и различные аппаратные средства, необходимые для решения задач связи с объектом, отображения информации и др. Они решают практически любые задачи по реализации алгоритмов автоматического регулирования непрерывных и непрерывно-дискретных ТП, логического управления, могут встраиваться в контрольно-измерительные приборы, периферийные устройства, обрабатывающие станки, транспортные механизмы и др. Области применения МК и выполняемые ими функции непрерывно расширяются. ЛОГИЧЕСКИЕ ОПЕРАТОРЫ Команды вызова логических операторов: 1) && – логическое И. Конъю́нкция (от лат. conjunctio союз, связь) – логическая операция, по своему применению максимально приближенная к союзу «и». Синонимы: логическое «И», логическое умножение, иногда просто «И». 2) || – логическое ИЛИ. Дизъю́нкция (лат. disjunctio – разобщение), логическое сложение, логическое ИЛИ, включающее ИЛИ; иногда просто ИЛИ – логическая операция, по своему применению максимально приближённая к союзу «или» в смысле «или то, или это, или оба сразу». 3)! x – логическое отрицание переменной x (инверсия). Отрицание в логике – унарная операция над суждениями, результатом которой является суждение (в известном смысле) «противоположное» исходному. Обозначается чертой над символом логической переменной (Макро́н). Синоним: логическое «НЕ» [4]. Задача № 1 Реализовать один логический элемент И, который будет выводить световой сигнал в зависимости от сигнала (0 или 1) поданного на входы P1_5 и P2_0. Текст программы представлен на рисунке 3.1.
Рисунок 3.1 - Программное решение задачи № 1 Данная программа, позволяет зажигать светодиод в зависимости от значений переменных: х и y (это могут быть 0 и 1). Значения данных переменных, подаются на соответствующие вводы микроконтроллера (P1_5, P2_0). Таким образом, происходит усложнение раздела void setup. В цикле void loop, происходит не только считывание сигналов с выводов, но и преобразование этих сигналов в соответствии с представленной логической функцией. В данной функции происходит конъюнкция (логическое И). Задача № 2 Реализовать один логический элемент ИЛИ, который будет выводить световой сигнал в зависимости от сигнала (0 или 1), поданного на входы P1_5 и P2_0. Текст программы представлен на рисунке 3.2.
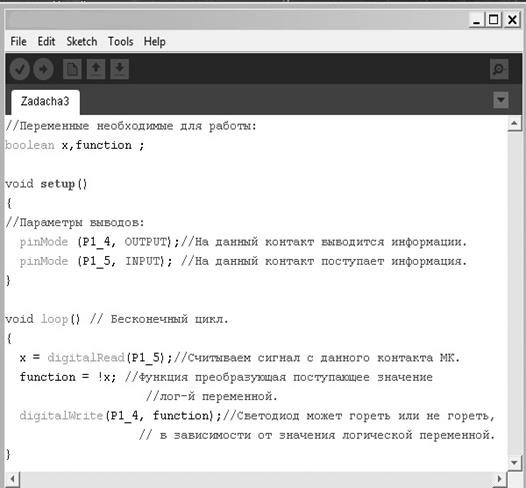
Рисунок 3.2 - Программное решение задачи № 2 Данная программа отличается от предыдущей (изображенной на рисунке 3.1) тем, что в ней реализована логическая функция, в которой вместо конъюнкции (логическое И), используется дизъюнкция (логическое ИЛИ). Других отличий данная программа не имеет. Таким образом, в данной программе, светодиод будет загораться, в зависимости от поступающих значений логических переменных х и y и функции логического взаимодействия между переменными. Задача № 3 Инвертировать сигнал, подающийся на вход P1_5, и вывести на светодиод. Текст данной программы представлен на рисунке 3.3.
Рисунок 3.3 - Программное решение задачи № 3
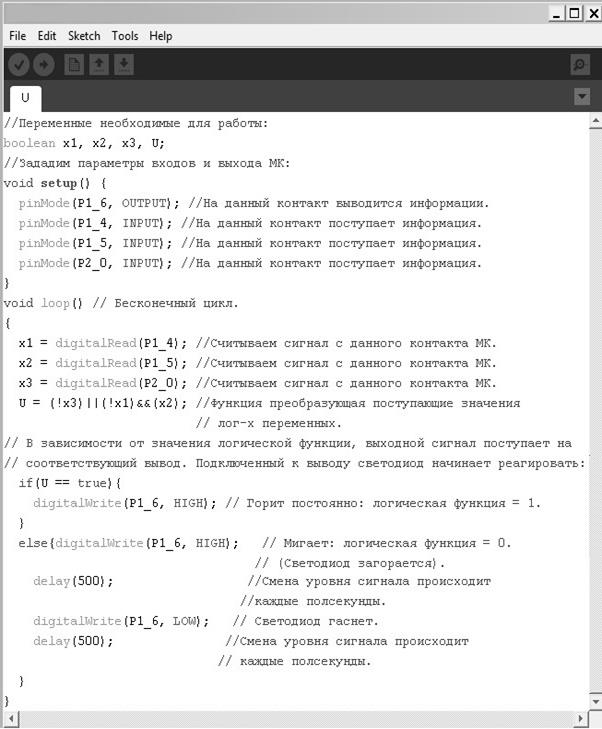
В данной программе реализована функция логического отрицания (инверсия). Светодиод будет загораться в зависимости от поступающего значения логической переменной х и значения логической функции. Данные программы, позволят без труда разобраться с программированием логических операторов. Задача № 1 Составить программу, для реализации на МК функцию трех переменных: Данная программа, позволяет зажигать светодиод в зависимости от значений логических переменных: х1, х2, х3 (это могут быть 0 и 1). Значения данных переменных, подаются на соответствующие входы микроконтроллера (P1_4, P1_5, P2_0). Для вывода информации, будем использовать контакт P1_6, связанный со светодиодом. В цикле void loop, происходит не только считывание сигналов с вводов, но и преобразование этих сигналов в соответствии с представленной логической функцией U. Это сложная функция, в которой задействованы конъюнкция, дизъюнкция и инверсия. Далее приводятся условия для выполнения цикла в зависимости от поступающих значений переменных. Условие if, говорит о том, что если на выходе функция U равна логической единице (true), то светодиод будет гореть постоянно. И так будет продолжаться, пока значение функции U не станет отличным от единицы (станет равной логическому нулю). Тогда условие else заставит светодиод мигать. Такой цикл будет выполняться до бесконечности, пока подаются сигналы на соответствующие входы. Реализация задачи № 1 с помощью среды Energia представлена на рисунке 4.1.
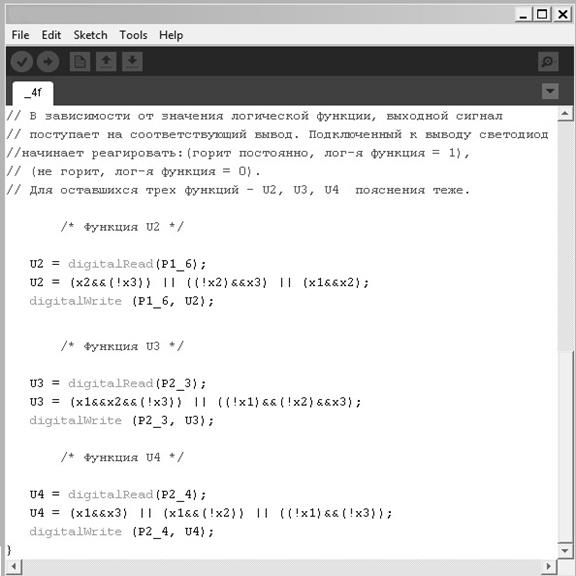
Рисунок 4.1 - Программное решение задачи № 1 Задача № 2 Составим программу для реализации на микроконтроллере четырех управляющих воздействий:
Реализация задачи № 2 с помощью среды Energia представлена на рисунках 4.2 и 4.2' (продолжение).
Рисунок 4.2 - Программное решение задачи № 2
Рисунок 4.2' (продолжение) - Программное решение задачи № 2
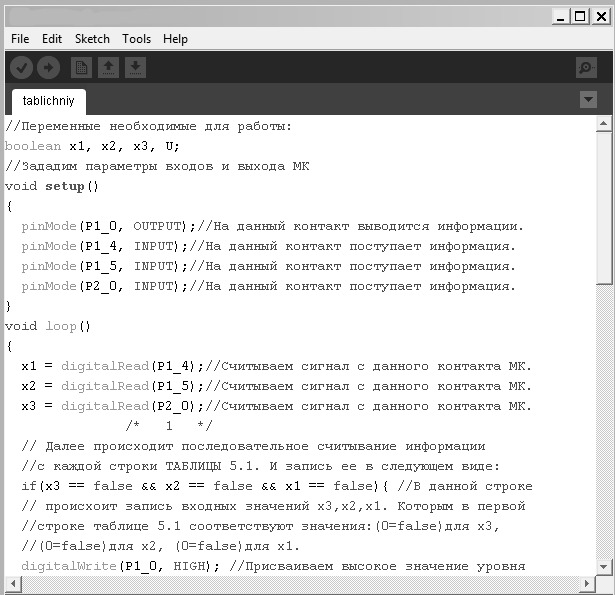
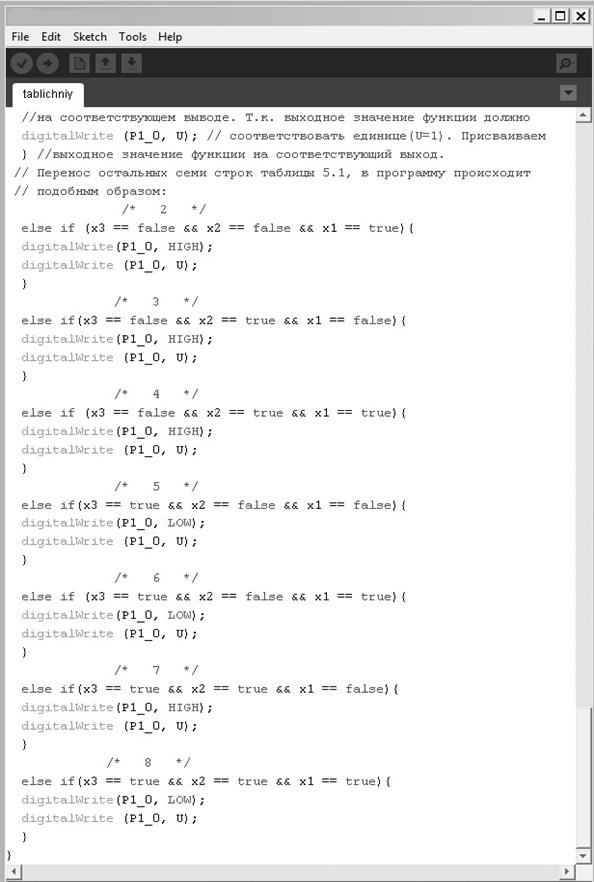
Данная программа отличается от предыдущей (рисунок 4.1) наличием четырех управляющих логических функций вместо одной. В зависимости от значений переменных, как-то: х 1, х 2, х 3, подаваемых на микроконтроллер, каждая функция будет выдавать определенные управляющие сигналы (это могут быть 0 и 1). И в соответствии с этим светодиоды, подключенные к определенным выходным контактам, могут гореть, либо не гореть. Задача № 3 Реализация одного управляющего воздействия с помощью цикла if.. else, if.. else if.. else. Для создания программы воспользуемся данными из таблицы 4.1. Реализация задачи № 3 с помощью среды Energia представлена на рисунках 4.3 и 4.3' (продолжение). Таблица 4.1 - Таблица управляющих воздействий
Рисунок 4.3 - Программное решение задачи № 3
Рисунок 4.3' (продолжение) - Программное решение задачи № 3 В данной программе используется только одно управляющее воздействие, которое зависит от значений логических переменных, таких как х 1, х 2, х 3. Кроме того, необходимо учесть выполнение того или иного условия, в зависимости от комбинации входных переменных, подаваемых на микроконтроллер. В том случае, если значения переменных совпадают с одним из восьми указанных условий, светодиод может загореться, при условии, что он имеет высокий уровень (HIGH), и не загореться, если условие имеет низкий уровень (LOW). Такой подход позволяет использовать таблицу значений логических переменных для определения комбинации управляющего воздействия. Данный цикл будет выполняться до бесконечности, пока подаются необходимые сигналы на соответствующие входы.
В отчет должны быть включены: задание, программа и принципиальная схема разработанной системы логического управления (СЛУ ). Программа и правильность работы разработанной СЛУ проверяется на лабораторном стенде. Кроме того, в лаборатории имеется описание аппаратуры стендов и правила пользования контроллером, необходимые для проверки работоспособности разработанной СЛУ.
к выполнению практических занятий по дисциплине «МЕТРОЛОГИЯ, СЕРТИФИКАЦИЯ, ТЕХНИЧЕСКИЕ ИЗМЕРЕНИЯ И АВТОМАТИЗАЦИЯ ТЕПЛОЭНЕРГЕТИЧЕСКИХ ПРОЦЕССОВ»
Тема: «Аппаратная и программная реализация систем логического управления».
Логическое управление широко используется в автоматизированных системах управления технологическим процессом (ТП). Функции логического управления заключаются в выработке сигналов управления на основании логического анализа исходной информации, характеризующей состояние технологического оборудования. Системы логического управления (СЛУ) обеспечивают решение задач автоматизированного пуска, останова, перевода из одного режима работы в другой, а также более простых задач – автоматических блокировок и защит, предупреждения и аварийной сигнализации и др. В децентрализованной системе управления устройства логического управления могут реализовываться аппаратными способами на базе релейных схем, полупроводниковых интегральных логических элементов. С появлением микропроцессорной техники проявляется тенденция замены аппаратных средств управления с фиксированной структурой программными средствами с применением программируемых микропроцессорных контроллеров. При практической реализации СЛУ исходная информация от объекта управления поступает в систему логического управления в форме дискретных сигналов: «1» или «0» (включён-выключен, открыт-закрыт, высокий или низкий уровень технологического параметра). Управляющие воздействия, формируемые в системе логического управления, также рассматриваются как двоичные логические переменные, принимающие значения либо «1», либо «0», а сама система представляется комбинационной схемой. Её можно задать двумя способами: таблицей истинности или функцией алгебры логики (булевой алгебры), связывающими выходные и входные логические переменные. Обычно исходной формой является таблица истинности, которая составляется при формулировании задачи логического управления. В распределённых автоматизированных системах управления (АСУ) ТП системы или устройства логического управления реализуются аппаратным или программным способами. При аппаратной реализации по таблице истинности записываются логические (переключательные) функции и составляется структурная схема в выбранном базисе. Устройство управления строится с использованием полупроводниковых интегральных логических элементов (ИЛЭ). Создание таких устройств с «жёсткой» (неизменной) структурой экономически оправдано при небольшом количестве входных и выходных переменных (до 20). Аппаратная реализация алгоритмов логического управления характеризуется высоким быстродействием. Основные недостатки – сложность схем, значительная потребляемая мощность, узкая специализация, что обусловливает необходимость разработки новых устройств при модернизации алгоритмов. Создание принципиально новой элементной базы – микропроцессоров (МП) послужило предпосылкой для реализации новой идеологии в построении приборов, систем обработки данных и управления. МП представляет собой универсальную полупроводниковую большую интегральную схему (БИС) с программируемой логикой. МП включает в себя средства обработки информации и управления процессом обработки и в настоящее время состоит из одной программно-управляемой БИС. Для систем управления характерна значительная взаимоудалённость компонентов системы. Применение МП невысокой стоимости и малых габаритов позволяет устанавливать их непосредственно на управляемом оборудовании (встроенные МП средства). Такой подход вносит существенные коррективы в стратегию управления, что относится в первую очередь к созданию распределённых (децентрализованных) систем управления ТП и производствами. Особенность таких систем заключается либо в рассредоточенном расположении средств управления, либо в разделении функций управления между несколькими МП комплексами, либо в том и другом одновременно. Основными чертами распределённых систем управления является их более высокое быстродействие, гибкость и адаптивность к решению задач, повышенная живучесть. Основными средствами локального управления в настоящее время являются МП контроллеры или микроконтроллеры (МК), включающие в себя МП и различные аппаратные средства, необходимые для решения задач связи с объектом, отображения информации и др. Они решают практически любые задачи по реализации алгоритмов автоматического регулирования непрерывных и непрерывно-дискретных ТП, логического управления, могут встраиваться в контрольно-измерительные приборы, периферийные устройства, обрабатывающие станки, транспортные механизмы и др. Области применения МК и выполняемые ими функции непрерывно расширяются.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2022-01-22; просмотров: 126; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.119 (0.015 с.) |

 U1 = 4Е записывается потетрадно в двоичном коде (4 = 0100, Е = 1110), далее записывается совместно
U1 = 4Е записывается потетрадно в двоичном коде (4 = 0100, Е = 1110), далее записывается совместно 


 .
.