Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Автотрак» – «Бейкер-Хьюз Интек»Содержание книги
Поиск на нашем сайте
В системе «Автотрак» основным элементом конструкции является невращаемый стабилизатор-отклонитель (рис. 11.1).
Рис. 11.1. Невращаемый стабилизатор-отклонитель На вращаемом приводном валу 1 размещается корпус невращаемого стабилизатора-отклонителя 2, в котором встроены блок электроники и датчики инклинометрии 5, управляющие гидравлическими клапанами 3, приводящими в действие отклоняющие опоры 4. Принцип действия отклоняющего устройства приведен на рис. 53а. Отклоняющие опоры, управляемые независимо друг от друга при определенном выдвижении из корпуса, задаваемом электроникой, создают радиальное усилие к долоту с направлением и силой, соответствующей векторной сумме усилий на опорах (рис. 11.2б).
а) б) Рис. 11.2. Принципиальная схема действия отклоняющего устройства

Рис. 11.3. Схема компоновки «Автотрак» Система «Автотрак» включает в себя (рис. 11.4): невращаемый стабилизатор-отклонитель 1, в котором размещаются датчики инклинометрии на долоте 2, опоры-отклонители 3; блок пульсатора/генератора 4, включающий в себя генератор 5, пульсатор 6, масляный насос 7; 213 мм стабилизатор 8; блок генератора-приемника 9, блок памяти 10, блок каротажа, сопротивления и гамма-каротажа 11; блок датчика вибрации 12; блок батарей 13, питающих телесистему при отсутствии или недостаточной подаче бурового раствора; короткая немагнитная УБТ 14; основной блок инклинометрии 15.
Кроме этого, могут быть включены в компоновку дополнительный блок каротажа 16, в который входят: модульный датчик плотности 17; модульный нейтронный датчик пористости 18. Над телесистемой располагаются немагнитные УБТ. РУС можно приводить во вращение не только ротором, но и забойным объемным двигателем 20 с большим крутящим моментом из соображений сохранения стенок обсадной колонны или сокращения энергозатрат.
Пауэрдрайв» – «Шлюмберже»
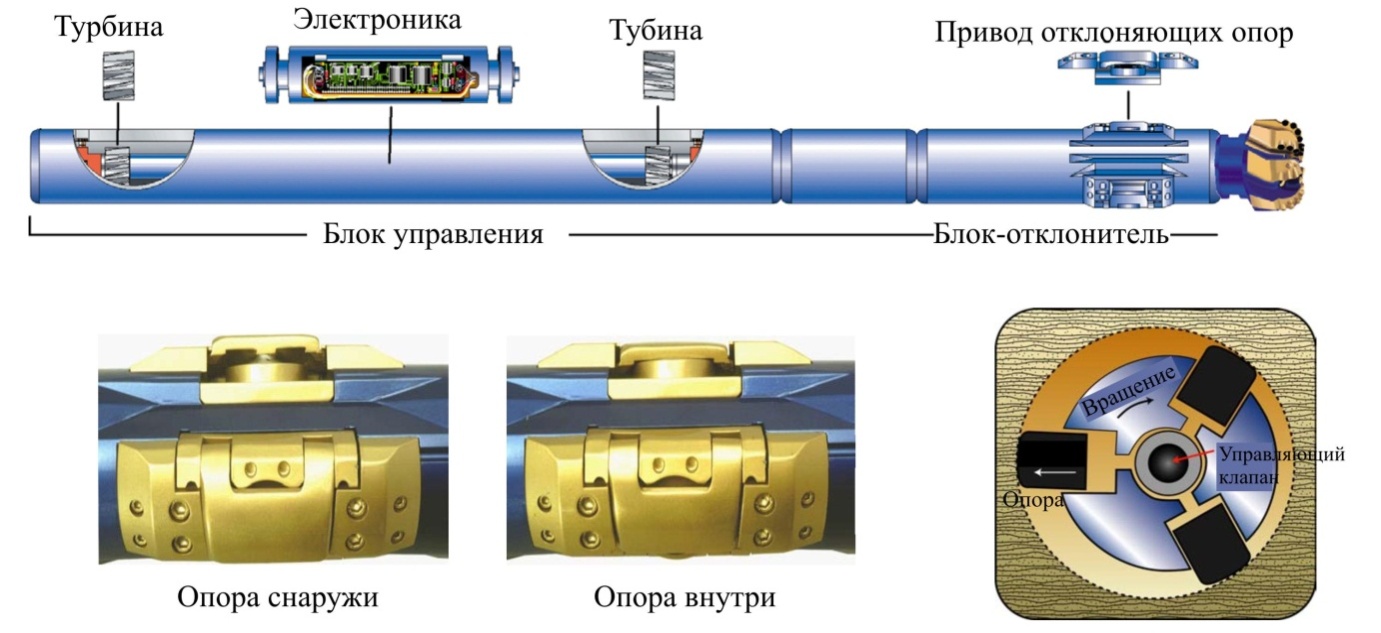
Роторная управляемая система «Пауэрдрайв» компании «Шлюмберже» не имеет невращающихся элементов в своем составе, что значительно уменьшает вероятность прихвата в скважине, компактна и имеет простую конструкцию. В ней сохранен принцип модульности, компоновка совместима с устройствами каротажа. В её состав входят блок-отклонитель, отклоняющий долото; переводник, соединяющий с блоком управления; стабилизатор; гибкое соединение между телесистемой и бурильной колонной (рис. 11.5).
Рис. 11.5. Система в сборе
В состав блока управления входят блок электроники, стабилизируемый в пространстве гироскопом; турбины генератора энергии; управляющий клапан. В блоке отклонителя встроена сложная гидравлическая система, управляемая электроникой, через центральный клапан приводящая в действие отклоняющие опоры. Синхронизированные с вращением компоновки отклоняющие опоры выходят из корпуса, смещая тем самым корпус системы и долото в противоположную сторону, и возвращаются в корпус, в то время как выдвигается следующая опора (рисунок 11.6). Направление действия опор может быть любым, что позволяет проводить сложные трехмерные профили.
Рис. 11.6. Элементы управления траекторией
При бурении используется долото, вооруженное пластинами АТП, специально спроектированное для конкретных условий. Долота «Рид Хайкалог» диаметром от 114 мм до 464 мм имеют сложное строение ребер, агрессивное вооружение, малую высоту для интенсивного набора кривизны (рис. 11.7).
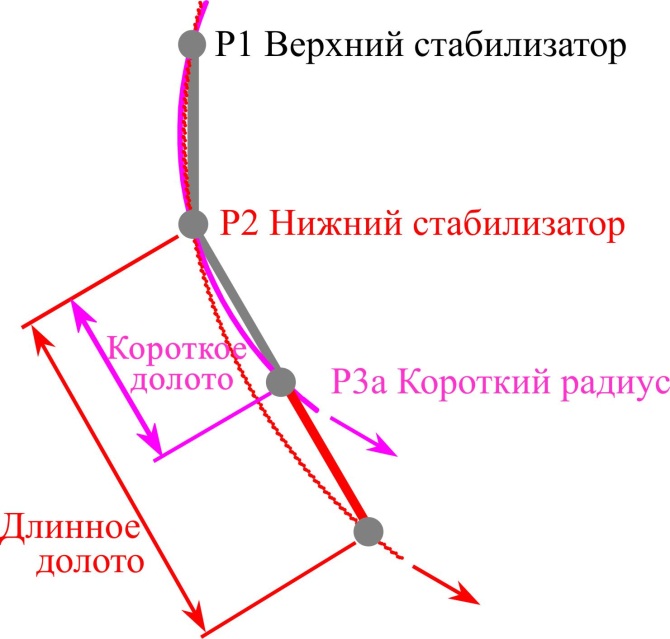
Рис. 11.7. Выбор долота для бурения
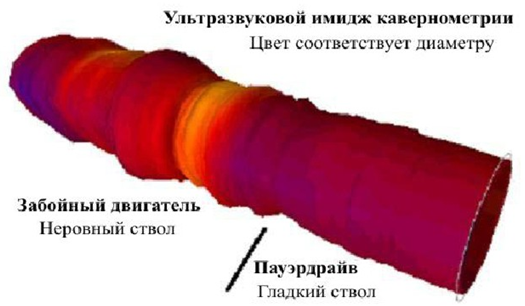
Бурение с роторными управляемыми компоновками значительно улучшает качество ствола и, следовательно, его очистку, что особенно важно в горизонтальных скважинах. Минимальная микрокривизна значительно уменьшает трение о стенки скважины, что позволяет бурить с большим отходом от вертикали и спускать обсадные колонны на большую глубину. Спиральная выработка, столь характерная для шарошечных долот и турбинного бурения, значительно увеличивающая износ долот и площадь забоя скважины, имеет незначительный характер, хотя, как отмечают исследователи, часто возникает при поликристаллическом вооружении долота. На рисунке 58 трехмерный график кавернометрии показывает неровный с переменным диаметром ствол при бурении с обычным забойным двигателем и гладкий ствол при использовании «Пауэрдрайв».
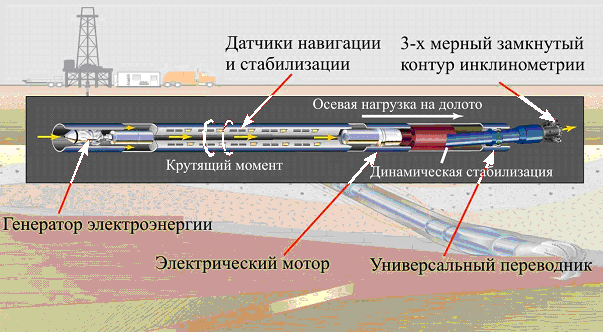
Рис. 11.9. Сравнение профилей при бурении с обычным забойным двигателем и «Пауэрдрайв» На базе «Пауэрдрайв» «Шлюмберже» разрабатывается роторная управляемая система «Директ» с позиционированием долота (рисунок 11.10). Компоновка вращается верхним приводом либо забойным двигателем. В корпусе устройства размещены: турбинный генератор электроэнергии, блок электроники содержит датчики геонавигации и стабилизации, электромотор, в универсальном переводнике помещен узел подшипников и герметизации, приводной вал долота.
Рис. 11.10. Система «Директ» в сборе В системе применяется динамическая стабилизация, то есть отклонение приводного вала от оси скважины синхронизировано с вращением бурильной колонны (рисунок 11.11). Приводной вал, расположенный в подшипниках, отклоняется электромотором от оси скважины. В наддолотном переводнике встроены датчики инклинометрии, что позволяет динамически позиционировать долото. Система находится в стадии промышленных испытаний.
Рис. 11.11. Схема действия системы «Директ»
|
||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-04-18; просмотров: 1992; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.221.116.226 (0.006 с.) |



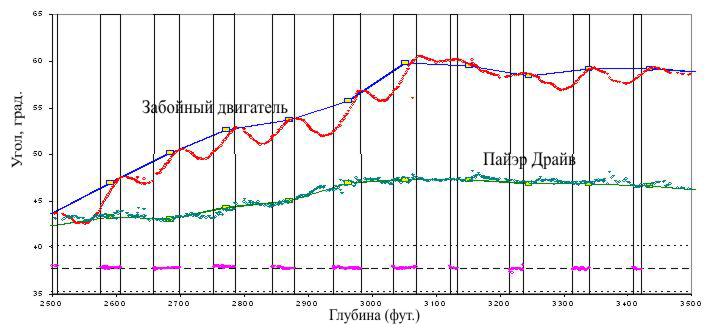 На рисунке 11.9 сравнивается соответствие проектной и фактической траектории ствола скважины при бурении с забойным двигателем и рассматриваемой системой. Вверху - фактическая траектория компоновки с забойным двигателем, выделяются перегибы ствола при наборе и падении зенитного угла. Более сложный профиль получается при проводке трехмерного профиля с изменением зенитного угла и разворотом по азимуту. Внизу – траектория с «Пауэрдрайв», перегибы ствола малозначительны.
На рисунке 11.9 сравнивается соответствие проектной и фактической траектории ствола скважины при бурении с забойным двигателем и рассматриваемой системой. Вверху - фактическая траектория компоновки с забойным двигателем, выделяются перегибы ствола при наборе и падении зенитного угла. Более сложный профиль получается при проводке трехмерного профиля с изменением зенитного угла и разворотом по азимуту. Внизу – траектория с «Пауэрдрайв», перегибы ствола малозначительны.