
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Элементы и функциональные группы гидравлических схем.Содержание книги Поиск на нашем сайте
Функциональными элементами схем являются гидромашины, устройства управления и вспомогательные устройства. Основной тип элементов и связей - гидравлические, однако могут использоваться также механические и электрические. При описании конкретного гидропривода его характеристики складываются из характеристик гидропередачи согласно ГОСТ 17752-81 и устройства управления, Доминирующее применение в промышленности имеют насосные и, как их подвид, магистральные гидроприводы с разомкнутым кругом циркуляции потока, основными признаками которых являются признаки управления [1]. Схемы управления по своему построению подчиняются общей теории автоматического управления и таким образом гидроприводы могут рассматриваться как системы автоматического регулирования (САР). Управление гидравлическими приводами осуществляется, как в подготовительной фазе – настройка, так и в процессе работы гидропривода - регулирование. Так в подготовительной фазе производится настройка, определяющая тип гидропривода: привод постоянного расхода и привод постоянного давления. Схемные различия заключаются в отсутствии нормально открытого переливного клапана - приводы постоянного расхода, или его наличии - приводы постоянного давления. Кроме того, производится зарядка аккумулятора на определенное давление р 0, настройка величины рабочего объема насоса, а также настройка на синхронизацию движений ведомых звеньев нескольких гидродвигателей, и другие операции. Регулирование параметров гидроаппаратуры производится в процессе работы гидропривода с целью оперативного управления параметрами ведомого звена гидродвигателя: направлением, величиной перемещения, скоростью и силовой характеристикой. Выполнению процедур управления отвечают наработанные или вновь создаваемые элементарные схемы, они же функциональные группы в сложных схемах гидроприводов[2,20].
Рисунок 46 - Схемы управления 2-мя и более гидродвигателями: а) при последовательном соединении; б) и в) при параллельном соединении
При последовательном соединении гидродвигателей обеспечивается возможность независимого включения каждого из них отдельно и одновременного включения хотя бы двух из них, при этом поток от насоса проходит последовательно через все распределители и включенные двигатели (рисунок 39,а). Требуемые параметры насоса, при этом определяются по закону последовательных соединений:
рн =
При параллельном соединении каждый из распределителей не может иметь разгрузочной нейтральной позиции, так как в этом случае произошло бы шунтирование любого автономно включаемого гидродвигателя. Проблема решается либо введением дополнительной ступени управления в виде распределителя общего включения (р1 на рисунке 39,б), либо введением дополнительной линии, связывающей последовательно насос и резервуар через параллельно подключенные распределители (рисунок 39,в). Эта линия работает разгрузочно при нейтральных положениях всех распределителей и прерывается при включении любого из них. Требуемые параметры насоса, при этом определяются по закону параллельных соединений:
рн = рi; Qн =
8.1.1 Следящие гидроприводы. Здесь регулирование величины перемещения практически всегда производится связанно с управлением направлением. При этом достаточно часто решается задача обеспечения согласованных движений ведомых звеньев нескольких гидродвигателей. В основном это либо обеспечение определенного алгоритма включений в дискретном режиме, либо обеспечение сложных движений объекта в непрерывном режиме.
Рисунок 47 - Управление направлением и величиной перемещения бойков гидромашин ударного действия: а) – разомкнутая САР; б) – замкнутая САР
1 – насос (внешний источник энергии); 2 – гильза золотника; 3 – обратная связь; 4 – исполнительный гидроцилиндр; 5 – золотник усилителя; 6 – винт; 7 – рулевое колесо (задающее устройство)
Рисунок 48 - Принципиальная схема рулевого гидроусилителя автомобиля
Рисунок 49 - Следящий гидропривод гидрокопировального станка
На рисунке 42 [5] управляющее перемещение Х от рулевого колеса 7 через винт 6 передается золотнику усилителя 5, в результате шток исполнительного гидроцилиндра 4 движется в том же направлении, чем обеспечивается соответствующий поворот колес автомобиля. Одновременно движение штока гидроцилиндра 4 передается через обратную связь 3 гильзе золотника 2, восстанавлвающей после перемещения на величину У нейтральное положение золотника 5. Таким образом, обеспечивается следящий способ соответствия управляющего и рабочего перемещений Х=i•У, где i – передаточное число механизма обратной связи 3. Примером согласования в следящем режиме движений двух объектов может служить схема на рисунке 49 гидрокопировального токарного полуавтомата [6,21]. Здесь достигается согласование движений резца вдоль двух осей координат. Механизм обеспечивает согласование движений гидроцилиндров поперечной Ц1 и продольной Ц2 подач по направлению и перемещению по замкнутой схеме посредством обратных механических связей ОС1- от гильзы распределителя к гидроцилиндру Ц1, и ОС2 - от шаблона Ш к гидроцилиндру Ц2, а по скорости — регулятором расхода PP с внутренними обратными связями от потока на выходе до и после дросселя. 8 .2 Построение режимных и регулировочных характеристик
Одной из важных технических характеристик гидропривода является характеристика скорости ведомого звена, построенная в зависимости от установки регулятора или от изменения внешней нагрузки. В первом случае будем говорить о регулировочной характеристике, во втором — о режимной. Построение их для известных способов регулирования может быть произведено с использованием следующих методических рекомендаций.
8.2. 1 Объемное регулирование Обеспечивается изменением рабочего объема насоса (чаще), гидромотора и иногда обеих гидромашин. Достоинствами способа являются независимость скорости от нагрузки, если не учитывать влияния объемных потерь и сжимаемости жидкости, а также наибольшая из всех способов экономичность. Недостатками являются высокие капитальные затраты на приобретение регулируемых гидромашин и низкое быстродействие процесса регулирования.
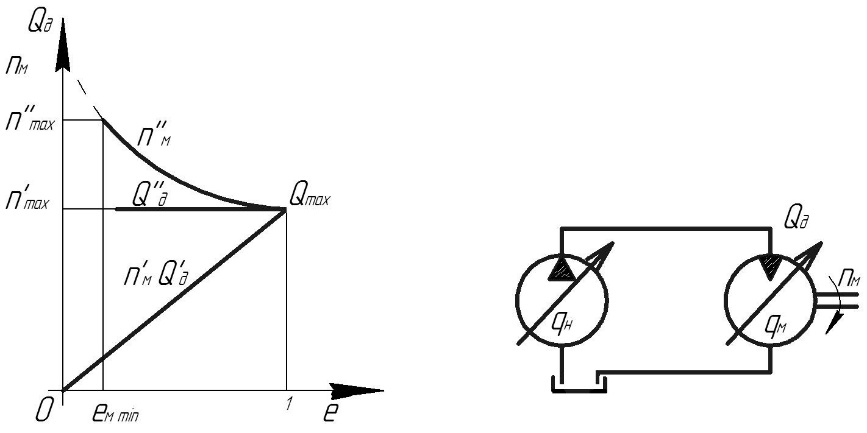
Рисунок 4.5 – Характеристики гидромотора при объемном регулировании
Выходная скорость ведомого звена для гидромотора определяется по формуле:
Изменение рабочего объема для каждой из гидромашин характеризуется параметром регулирования е = q/qmax, изменяемым в диапазоне 0...1. Вид характеристик представлен на рисунке 4.5. Анализ их показывает предпочтительность регулирования насосом, так как здесь скорость изменяется в диапазоне 0...nmax, тогда как при регулировании рабочего объема гидромотора диапазон n’max...n”max ограничен минимальной скоростью гидромотора и соответствующей величиной eм.min.
8 .2. 2 Дроссельное регулирование привода постоянного давления Обеспечивается последовательным дросселем со сбросом жидкости через переливной клапан. Очевидным недостатком дроссельного регулирования является низкий КПД. Достоинства — быстродействие, удобство автоматизации, низкие капитальные затраты на гидрооборудование. Характеристики гидромотора и силового гидроцилиндра для случая, представленного на рисунке 4.6,а, строятся по формулам (4.43), (4.45), где расход двигателя, Qд= DQдр и может быть определен по формуле:
Здесь Pр — давление настройки переливного клапана в точке разделения потока; DPд — перепад давления на двигателе, определяется для гидромотора и гидроцилиндра при показанном случае подключения из формул (4.41) и (4.44):
Перепад давления DPт относится ко всему трубопроводу от точки разделения потока, исключая DPдр, а Pс = DPс — ко сливному. После преобразований конечные формулы для построения характеристик имеют вид:
На рисунке 4.6,в представлены графические характеристики скорости гидромотора: nм(Sдр) — регулировочная и nм(Мм) — режимная. Обе характеристики ограничены величиной nmax для полностью закрытого переливного клапана, а для режимных характеристик, кроме того, моментом холостого хода гидромотора Мхх.
а), б) схемы регулирования приводов постоянного давления и постоянного расхода соответственно; в), г) регулировочные и режимные характеристики приводов постоянного давления и постоянного расхода Рисунок 4.6 – Характеристики гидромотора при дроссельном регулировании
Кривые 1, 2, 3 построены на первом графике для трех значений нагрузочного момента в диапазоне Mmin... Mmax, на втором — для трех значений настройки дросселя в диапазоне Smin... Smax. Кривая 3 на первом графике дает при пересечении с осью абсцисс предельную величину Sдр0 для выбора дросселя при проектировании.
8 .2. 3 Дроссельное регулирование привода постоянного расхода Обеспечивается параллельным дросселем (рисунок 4.6,б). Здесь разделение потока подчиняется закону:
Решение системы дает формулы для расчета скоростных характеристик гидромотора и гидроцилиндра
где DРд и DРт определяются по формулам (1.21), (1.22), (4.52), (4.53); nmax и vmax — скорости для полностью закрытого дросселя. Графически регулировочная характеристика nм(Sдр) и режимная nм(Мм) представлены на рисунке 4.6,г. Здесь аналогичные ограничения величинами nmax для закрытого дросселя и Мхх для отсутствующей внешней нагрузки. Дроссель при проектировании выбирается по величине Sдр0 для минимального из ожидаемых нагрузочных моментов Мmin (кривая 1 графика nм(Sдр)). Характеристики для силового гидроцилиндра имеют аналогичный вид.
|
||||
|
|
Последнее изменение этой страницы: 2021-07-18; просмотров: 255; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.20 (0.009 с.) |

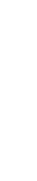 8.1.1 Управление направлением и величиной перемещения ведомого звена выполняются посредством позиционныхили дросселирующих распределителей, а также реле и аппаратуры синхронизации. В организации управления направлением могут также участвовать делители и сумматоры потока, а также аппаратура, функции которой показаны в таблице 5. Очевидно, каждый потребитель должен иметь свой распределитель. Задача несколько усложняется при распределении мощности между несколькими гидродвигателями необходимостью разгрузки насоса в случае отключения всех потребителей, т.е. при нейтральных положениях всех распределителей.
8.1.1 Управление направлением и величиной перемещения ведомого звена выполняются посредством позиционныхили дросселирующих распределителей, а также реле и аппаратуры синхронизации. В организации управления направлением могут также участвовать делители и сумматоры потока, а также аппаратура, функции которой показаны в таблице 5. Очевидно, каждый потребитель должен иметь свой распределитель. Задача несколько усложняется при распределении мощности между несколькими гидродвигателями необходимостью разгрузки насоса в случае отключения всех потребителей, т.е. при нейтральных положениях всех распределителей.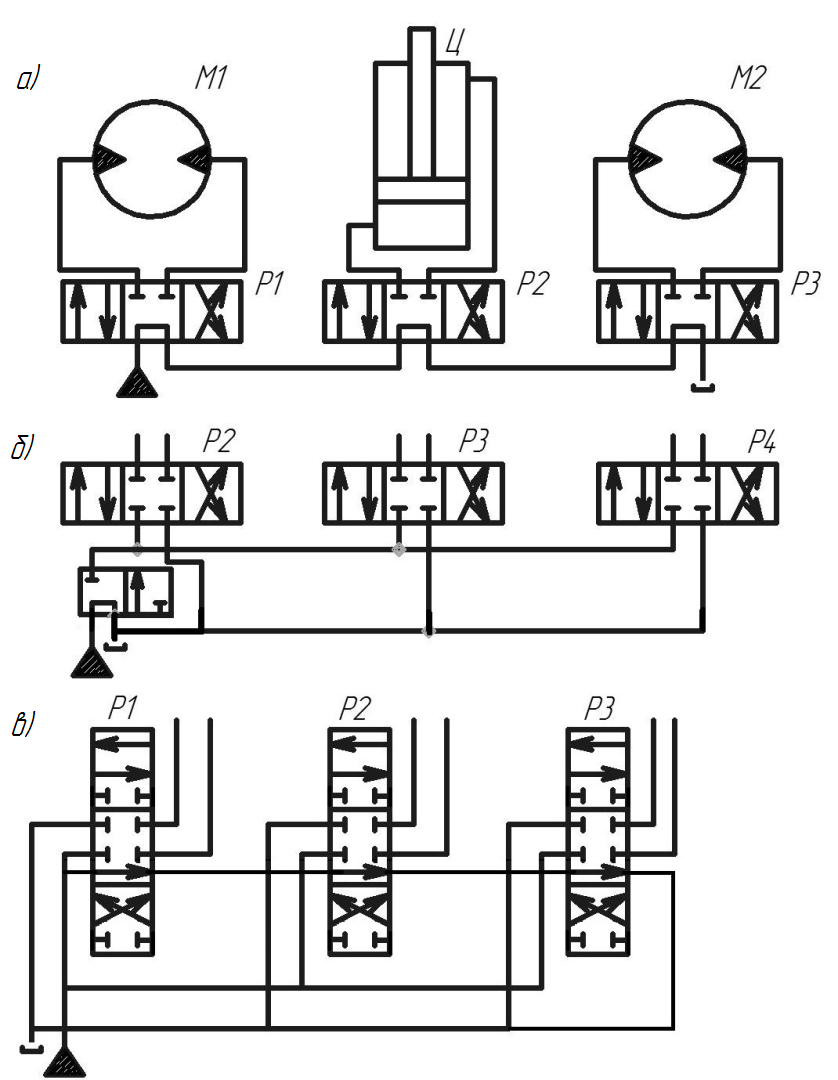
 рi; Qн = Qi. (50)
рi; Qн = Qi. (50)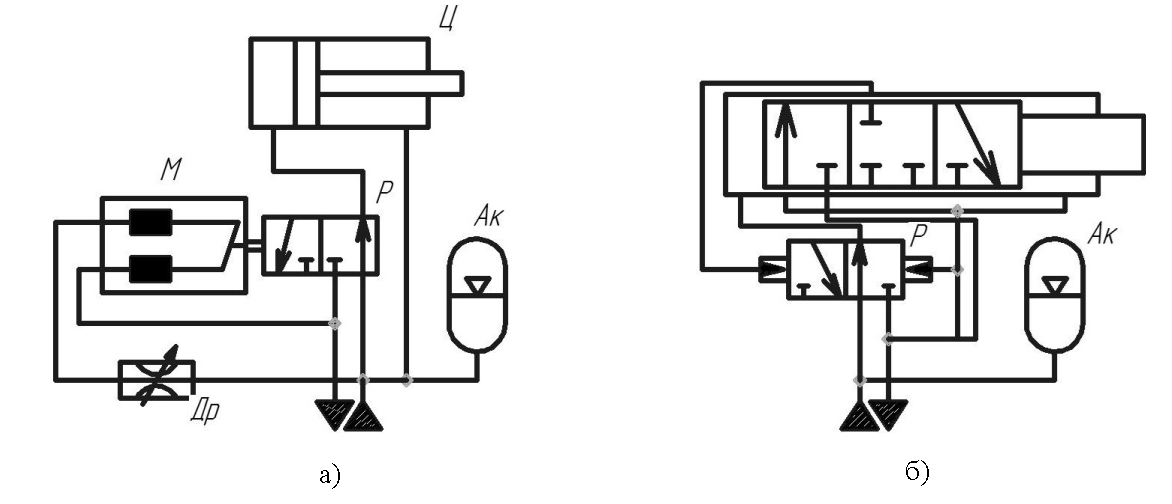
 . (60)
. (60) . (61)
. (61) .
. ; (4.52)
; (4.52) . (4.53)
. (4.53) (4.54)
(4.54)  . (4.55)
. (4.55)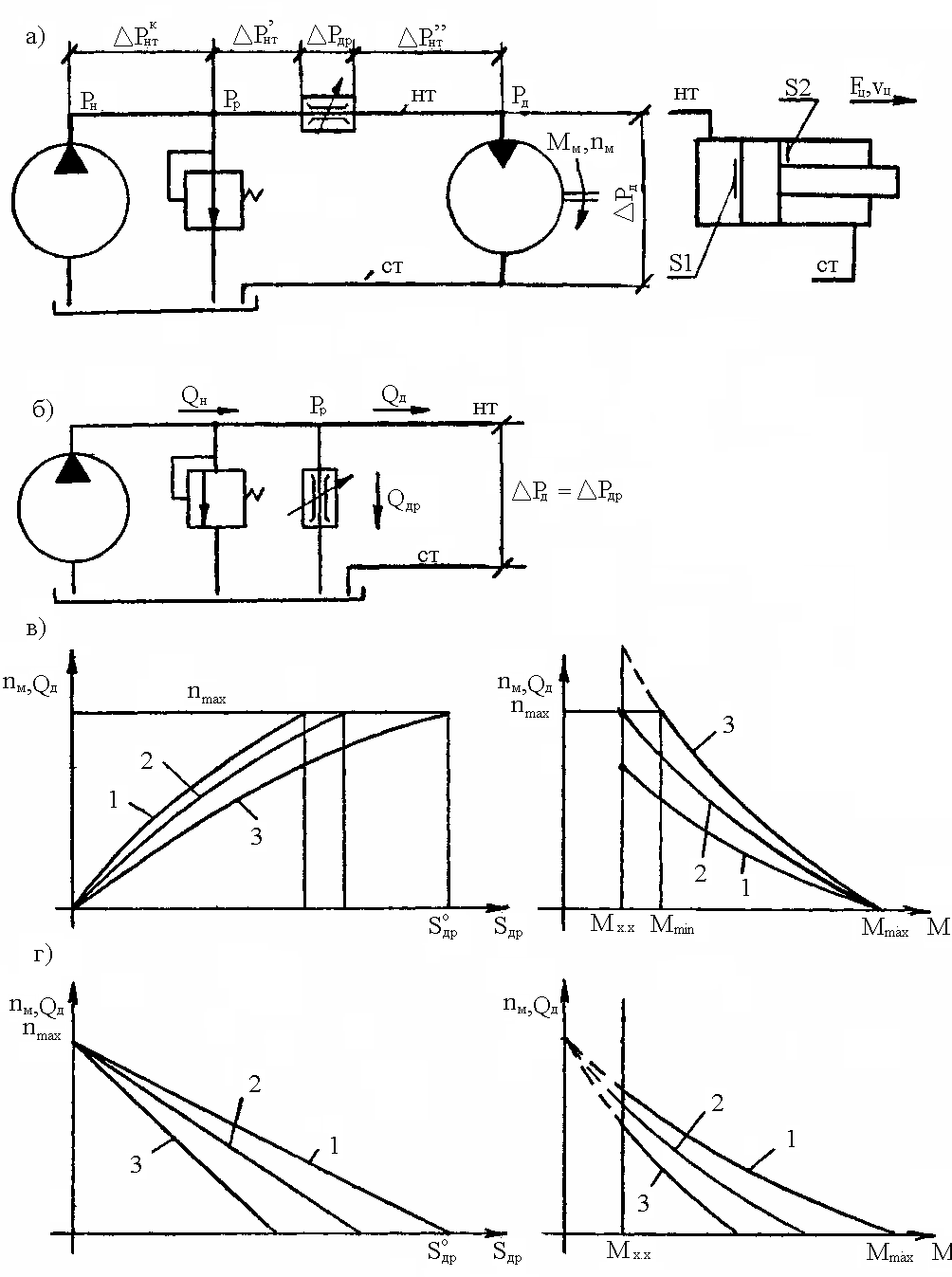
 ; (4.56)
; (4.56) , (4.57)
, (4.57)


