Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Разработка алгоритма программы
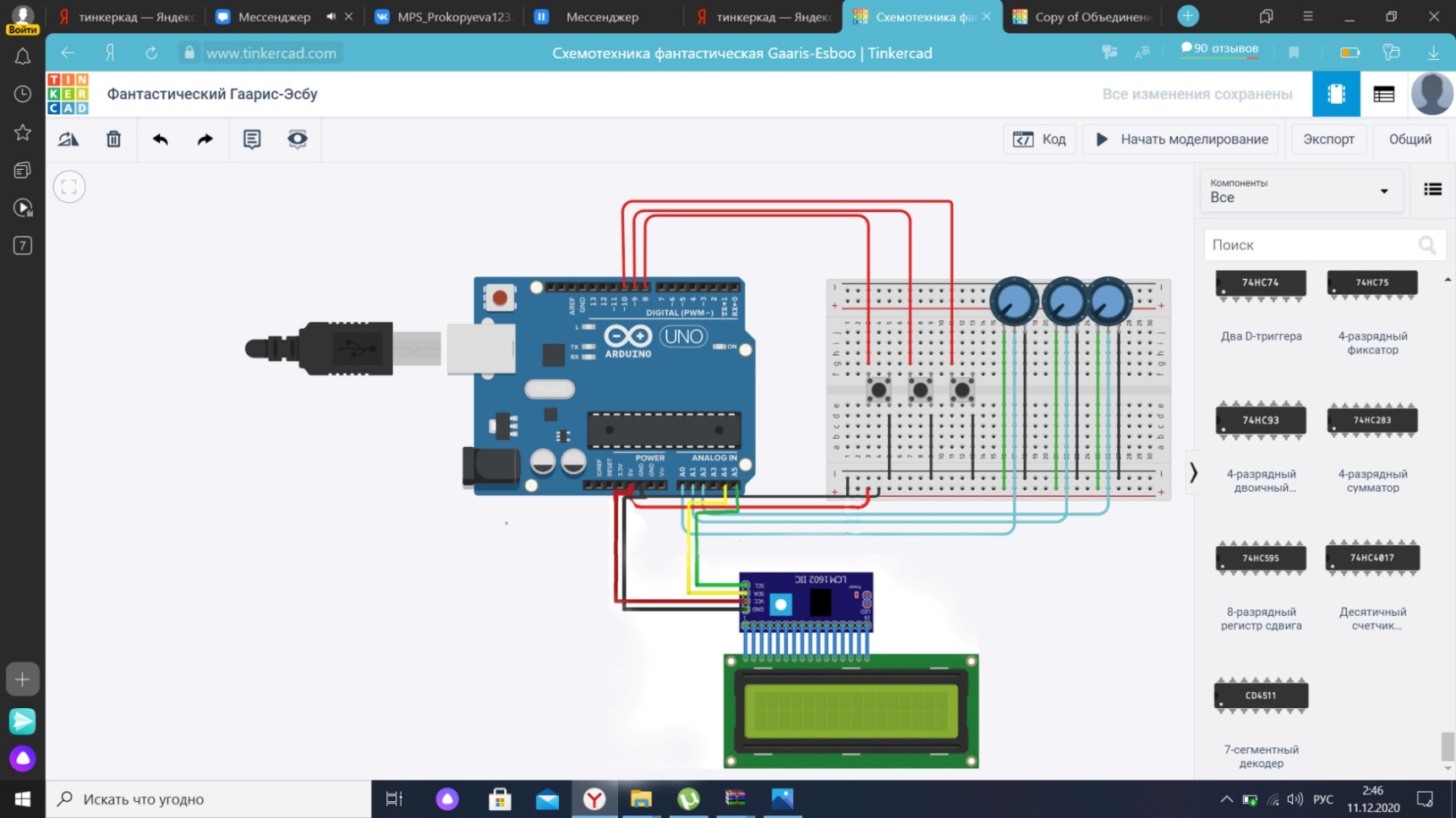
По заданию необходимо выполнить опрос нулевого (CH0), первого (CH1) и второго (CH2) каналов внешнего АЦП. Для визуального отображения изменения значения напряжения на заданном канале (CH0, CH1 или CH2) следует использовать жидкокристаллический дисплей на который выводится десятичный код текущего значения напряжения с интервалом 0.5сек (програмно двоичный код преобразовывается в двочный код). Опрос АЦП должен быть выполнен в подпрограмме обработки прерывания по таймеру. Для выбора номера канала использовать клавиатуру из трех кнопок. При нажатии на 1 кнопку выбирается нулевой канал, при нажатии на вторую кнопку-первый канал, а при нажатии на третью кнопку-второй. Разработанная программа была реализована с использованием Arduino. Кнопки подключены к выводам 8,9,10 платы Arduino, при нажатии на кнопку выбирается канал. Потенциометры подключается к выводам A0, A1, A2 платы Ardoino. C их помощью регулируется значение напряжения на выбранном канале. К портам A4, A5, 5V и GND платы Arduino подключается жидкокристаллический дисплей, на который выводятся десятичный код значения напряжения на канале. I2C,припаянный к жидкокристаллическому дисплею, преобразует двоичный код в Монтажная схема визуального отображения напряжения в десятичном коде представлена на рисунке 6.1.
Рис.6.1 Схема собранная в Tinkercad
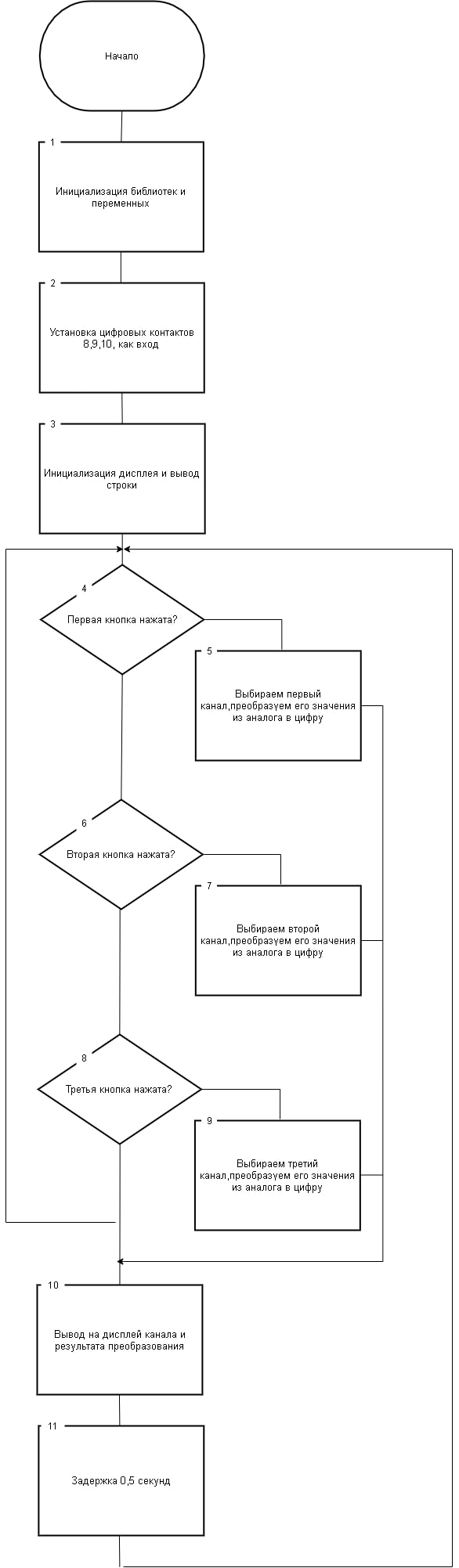
Согласно заданию, была разработана блок – схема. В блоках 1,2 и 3 происходит настройка контактов, объявление переменных, инициализация дисплея и включение подсветки. Далее в блоках 4-10 подпрограммы происходит опрос кнопок. Если кнопка нажата, то с неё снимается значение напряжения и преобразуется из аналогового сигнала в цифровой. На рисунке 6.3 представлена блок-схема. Листинг программы приведен в приложении А.
Рис.6.3 Блок-схема визуального отображения напряжения в десятичном коде Вывод В данном разделе был разработан алгоритм работы программы, осуществляющий опрос трех каналов и вывод с них на дисплей значения напряжения в десятичном коде, выполненный на плате Arduino.
ЗАКЛЮЧЕНИЕ Цель выпускной квалификационной работы, разработка микроконтроллерного устройства для управления электроприводом механизма передвижения тележки крана, была достигнута путем решения нескольких вопросов, таких как: · разработка силового преобразователя; · разработка системы автоматического управления; · разработка микропроцессорной системы управления. Сначала был реализован силовой преобразователь в виде управляемого выпрямителя, синтезированный по трёхфазной мостовой несимметричной схеме. Управляемый выпрямитель был реализован на тиристорах. Для согласования выпрямителя с сетью был выбран согласующий трансформатор ТС-15/0.6. Был произведен расчет регулировочной и внешних характеристик. Затем производился расчет рабочих и аварийных режимов для выбора и проверки основных элементов для защиты и коммутации тиристоров силового преобразователя. При выборе и проверке силового преобразователя был взят тиристор Т152-80 и диод Д132-80совместно с охладителем для тиристора О151-80 и охладителем для диода О231-80. Была произведена проверка по нагреву рабочим током, по аварийному току, по коммутационным параметрам. Установлены допустимые рабочие нагрузки по току, выбрана защита от аварийных перегрузок автоматическими воздушными выключателями. Защита от перенапряжения была реализована в виде RC-цепочки. Были построены диаграммы зависимости КПД и коэффициента мощности от тока нагрузки при разных углах управления. Также была разработана система импульсно – фазового управления преобразователем (СИФУ), реализованная на микроконтроллереSTM32F103ZF. Для управления движением тележки крана в обе стороны был реализован реверс силового преобразователя с помощью добавления дополнительного комплекта ключей. При синтезе системы управления был выбран регулятор состояния с астатизмом как наиболее удовлетворяющий техническим требованиям. Удалось обеспечить ограничение и поддержание скорости вращения двигателя в пределах 100 рад/с, как и требовалось по техническому заданию. Данная система не имеет перерегулирования (Ϭ = 0), т.к. при математическом описании был использован полином Ньютона, а также удалось исключить ошибку стабилизации скорости (∆M =0). В итоге была получена система, полностью удовлетворяющая требованиям технического задания.
Третьим этапом была разработка микропроцессорного блока. Цифровая система был реализована с помощью микропроцессора STM32F103ZF. Чтобы контролировать процессы в системе и управлять ими были подключены клавиатура и семисегментные индикаторы. Для передачи сигналов с аналоговых датчиков был выбран пятиканальный 10-разрядный АЦП. В программной части был разработан алгоритм работы программы, осуществляющей отображение на жидкокристаллический дисплей значения напряжения а поступающих с трех каналов в двоичном коде.
|
||||||
|
|
Последнее изменение этой страницы: 2021-07-18; просмотров: 87; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.222.97.149 (0.006 с.) |