
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Выпускная квалификационная работа. Выпускная квалификационная работа Выполнение монтажа и сборки схемыСтр 1 из 6Следующая ⇒
ВЫПУСКНАЯ КВАЛИФИКАЦИОННАЯ РАБОТА
(тема) Выпускная квалификационная работа должна быть выполнена в виде: дипломной работы и демонстрационного экзамена
Основная профессиональная образовательная программа по специальности 11.02.02 Техническое обслуживание и ремонт радиоэлектронной техники (шифр и наименование специальности) Форма обучения очная
( (подпись, дата)
Председатель предметной (междисциплинарной, модульной) комиссии Богомолов С.А. ___________ (И.О.Фамилия) (подпись, дата) Москва 2021
полное название образовательного учреждения
IV. Перечень подлежащих разработке вопросов
V. Перечень графического /иллюстрационного материала
VI. Дата выдачи задания «15» февраля 2021 г.
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Содержание……………………………………………………………………….3
Введение…………………………………………………………………………..4
Глава 1 Теоретическая часть…………………………………………………….7
1.1 Обзор систем радиоуправления и сравнение с десятиканальным радиоуправлением на MRF49XA………………………………………………..7
1.2 Описание структурной схемы десятиканального радиоуправления на MRF49XA………………………………………………………………….……..11
1.3 Описание принципиальной схемы десятиканального радиоуправления на MRF49XA………………………………………………………….…………..…12
1.4 Состав элементной базы…………………………………………………….14
1.5 Исходные данные десятиканального радиоуправления на MRF49XA…..15
1.6 Правила пайки и формовки выводов……………………………………….16
Глава 2 Практическая часть……………………………………………………..19
2.1 Обоснование и выбор контрольно-измерительной аппаратуры для проверки и контроля десятиканального радиоуправления на MRF49XA.......19
2.2 Организация рабочего места по сборке десятиканального радиоуправления на MRF49XA…………………………………………...……22
2.3 Технологический процесс монтажа и сборки устройства……………...…27
2.4 Программирование микросхем приемника и передатчика………………..40
2.5 Охрана труда и техника безопасности при проведении монтажных работ …………………………………………………………………………………….42
2.6 Анализ неисправностей и последовательность их устранения………...…44
2.7 Расчеты вероятности безотказной работы каскадов десятиканального радиоуправления на MRF49XA………………………………………………...45
|
|
Заключение……………………………………………………………………….49
Список литературы………………………………………………………………50
Приложение
Введение
Впервые в мире дистанционное управление (радиоуправление) было продемонстрировано русским инженером и изобретателем Николаем Дмитриевичем Пильчиковым в 1896 – 1898 годах. В основе примененного им принципа лежал прибор, способный принимать не все радиоволны, а только радиоволны, имеющие конкретную длину. То есть, прибор Пильчикова настраивается на определённую радиоволну и отфильтровывает все радиопомехи.
25 марта 1898 г. в Одессе профессор Пильчиков демонстрировал свои опыты. С помощью радиоволн, проходящих через стены зала, он зажигал огни маяка, заставлял пушку стрелять, подорвал небольшую яхту и даже перевёл семафор на железной дороге. Пильчиков предложил российскому военному ведомству с помощью его прибора «возможность взрывать заложенные мины на значительном расстоянии, не имея с ними никакого сообщения кабелем или проволокою». Он писал о возможности строить радиоуправляемые минные лодки, которые могли бы без экипажа топить неприятельские корабли.
С развитием прогресса появлялось все больше задач, которые человек не может выполнить собственноручно, например, из-за чрезмерной опасности для здоровья или жизни. Тогда он использует вспомогательные средства. Но ведь их надо контролировать. И в этом ему помогает дистанционное управление.
Основной принцип заключается в том, что команды от оператора преобразуются в последовательность электрических импульсов, которые потом модулируются в радиосигнал. Приемник получает сигнал и совершает обратные преобразования, доставляя последовательность импульсов до нужного узла.
Дистанционное управление имеет каналы, и чем их больше, тем больше возможностей устройства оно может контролировать. Данная схема имеет 10 каналов, то есть устройство, которое управляется данной схемой, может выполнять до 10 действий включительно.
Это можно использовать в самых разнообразных сферах деятельности человека. Начиная с развлекательной, где потребуется всего несколько каналов, и заканчивая промышленной, где человек может контролировать технику.
Актуальность и значение:
В настоящее время с развитием технологий человек все больше занимается такой деятельностью, которая способна нанести вред его здоровью или даже жизни. В связи с этим стали довольно востребованы системы контроля, которые позволяют дистанцироваться от опасного воздействия.
При интеграции системы дистанционного управления в устройство, эксплуатируемое в экстремальных условиях, снижается вероятность риска для человека. Это позволяет увеличивать производительность труда и сводит на нет шансы человека на получение какой-либо травмы.
Сейчас системы ДУ используются во многих отраслях промышленности: химическая, машиностроение, исследовательские лаборатории и др. В основном ДУ интегрировано в разные подвижные устройства, которые и заменяют человека. Они способны выполнять разные действия, но количество этих действий зависит от числа каналов в системе ДУ. Чем их больше, тем больше действий может выполнять устройство, что повышает его значимость для выполнения задач разного рода.
|
|
Цель:
Выполнение монтажа и сборки схемы устройства десятиканального радиоуправления на MRF49XA, его техническое обслуживание и ремонт.
Задачи:
· Разработка структурной схемы
· Разработка принципиальной схемы
· Выполнение монтажа печатной платы
· Провести регулировку и настройку
· Произвести проверку
· Выявить возможные неисправности и их причины
Глава 1 Теоретическая часть
Состав элементной базы
Передатчик
| Обозначение | Тип/номинал | Количество | Примечание |
| Ант. | Медный провод 0.5м | 1 | |
| L1-L3 | 52нГн | 3 | |
| C2, C3, C6 | к10-17б/100nF | 3 | |
| C4, C5 | Чип SMD/4.7pF | 2 | |
| C7 | к10-17б имп./18pF | 1 | |
| C1 | ECAP/33uF | 1 | |
| SW1-SW10 | KLS7-TS6601-4.3-180 | 10 | |
| IC1 | PIC16F628A | 1 | |
| IC2 | MRF49XA | 1 | |
| R3 | CF25 - 0,25/100 | 1 | |
| R1, R2 | CF25 - 0,25/1k | 2 | |
| ZQ1 | hc-49s/10МГц | 1 | |
| HL1 | BL-L101UYC | 1 |
Приемник
| Обозначение | Тип/номинал | Количество | Примечание |
| Ант. | Медный провод 0.5м | 1 | |
| L1-L3 | 52нГн | 3 | |
| C2, C3, C6 | к10-17б/100nF | 3 | |
| C4, C5 | Чип SMD/4.7pF | 2 | |
| C7 | к10-17б имп./18pF | 1 | |
| C1 | ECAP/33uF | 1 | |
| IC1 | PIC16F628A | 1 | |
| IC2 | MRF49XA | 1 | |
| R1 | CF25 - 0,25/1к | 1 | |
| R2-R11 | CF25 - 0,25/560 | 10 | |
| ZQ1 | 10МГц | 1 | |
| HL1-HL10 | BL-L101UYC | 10 |
1.5 Исходные данные десятиканального радиоуправления на MRF49XA
Устройства имеют следующие технические характеристики:
Передатчик.
· Мощность - 10 мВт.
· Напряжение питания 2,2 - 3,8 В (согласно даташиту, на практике нормально работает до 5 вольт).
· Ток, потребляемый в режиме передачи - 25 мА.
· Ток покоя - 25 мкА.
· Скорость данных - 1кбит / сек.
· Всегда передается целое количество пакетов данных.
· Модуляция FSK.
· Помехоустойчивое кодирование, передача контрольной суммы.
Приемник.
· Чувствительность - 0,7 мкВ.
· Напряжение питания 2,2 - 3,8 В (согласно даташиту, на практике нормально работает до 5 вольт).
· Постоянный потребляемый ток - 12 мА.
· Скорость данных до 2 кбит / сек. Ограничена программированием.
· Модуляция FSK.
· Помехоустойчивое кодирование, подсчет контрольной суммы при приеме.
Дальность действия – до 800 метров.
Глава 2 Практическая часть
Заключение
В результате выполнения данной дипломной работы была изучена схема десятиканального радиоуправления на микросхеме MRF49XA, процесс ее сборки и отладки. Проведена оценка по конструктивным критериям, выявляя возможные неисправности и методы их устранения.
|
|
Оценена экономическая ценность данного устройства.
Была выбрана контрольно-измерительная аппаратура. Описан технологический процесс изготовления печатных плат, её сборка и монтаж
Разработана структурная схема, принципиальная схема, смоделирована плата в САПРе.
Организованно рабочие место радиомонтажника с необходимым оборудование и инструментом.
Список литературы:
Интернет-ресурсы:
· https://amperof.ru/teoriya/raschet-katushki-induktivnosti.html#i-8
· https://beltrud.ru/ohrana-truda-i-tehnika-bezopasnosti-na-predpriyatii/
· https://studbooks.net/2365838/tehnika/opisanie_organizatsii_rabochego_mesta_montazhnika_ohrany
· https://www.radioingener.ru/10-komandnoe-kanalnoe-radioupravlenie-na-mrf49xa/
· http://www.tvskit.narod.ru/stati/stati21/stati21.html
· https://www.radioingener.ru/10-komandnoe-kanalnoe-radioupravlenie-na-mrf49xa/
Приложение 1
Размеры платы:
Передатчик 79*66мм
Приемник 75*63
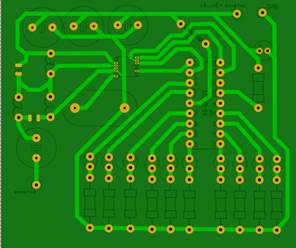
Приложение 2
Печатная плата передатчика в САПРе (а) вид снизу, б) вид сверху).
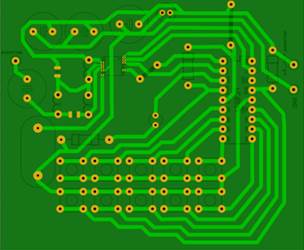
а) б)
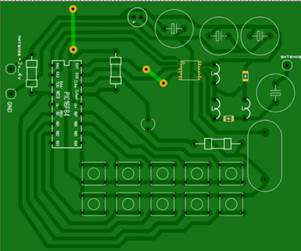
Печатная плата приемника в САПРе (а) вид снизу, б) вид сверху).
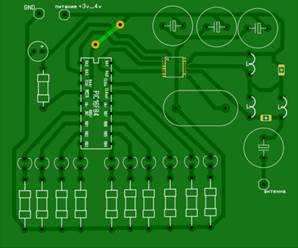
а) б)
ВЫПУСКНАЯ КВАЛИФИКАЦИОННАЯ РАБОТА
| Выполнение монтажа и сборки схемы десятиканального радиоуправления на MRF49XA, его техническое обслуживание и ремонт |
(тема)
Выпускная квалификационная работа должна быть выполнена в виде:
дипломной работы и демонстрационного экзамена
| студентом группы | 4ОРТ9-2 |
| Павловым В.С. | (номер группы) |
| (И.О.Фамилия) (подпись, дата) | |
Основная профессиональная образовательная программа по специальности 11.02.02 Техническое обслуживание и ремонт радиоэлектронной техники
(шифр и наименование специальности)
Форма обучения очная
| Руководитель | Преподаватель Ручко Виктор Михайлович |
| (ученая степень, должность, И.О.Фамилия) (подпись, дата) | |
| Руководитель | мастер производственного обучения |
| (ученая степень, должность, И.О.Фамилия) | |
( (подпись, дата)
Председатель предметной (междисциплинарной, модульной) комиссии
Богомолов С.А. ___________
(И.О.Фамилия) (подпись, дата)
Москва
2021

полное название образовательного учреждения
| УТВЕРЖДАЮ | |||||||||||||||||||||||||||||||||||||||||||||
| _______________________ | |||||||||||||||||||||||||||||||||||||||||||||
| Заместитель директора по УПР О.В. Корешков _________________ | |||||||||||||||||||||||||||||||||||||||||||||
| (дата) | |||||||||||||||||||||||||||||||||||||||||||||
ЗАДАНИЕ НА ВЫПУСКНУЮ КВАЛИФИКАЦИОННУЮ РАБОТУ
| |||||||||||||||||||||||||||||||||||||||||||||



